


I worked hard on making an automated Bag Valve Mask Pump. This is essentially a VENTILATOR. There is a huge demand on ventilators right now. So I discussed a few models and linked the code down below the video. Please watch it and if you plan on making on reply so we can help out the doctors. I have made an over powerful version using VEX IQ parts but a simple Arduino will due. This cost a little less than $250 for the Vex IQ parts but certainly cheaper for the Arduino.
Since this is the off-season of Vex and you all probably have some parts remaining please consider doing this. If you want to try remaking it using Arduino that would be cheaper and cost-efficient.
We need this to get popular so we can donate to doctors. All the Code and information is in the description of the YouTube video.
With all your help in creating these cost effective ventilators with old VEX or electronic components, we can SAVE LIVES!
If we can get a doctor in on this we can help them out. Right now they do not have much, so if we have something that is approved that would be awesome.If you guys could Share this with other people that would be great and help us get close to approving it.
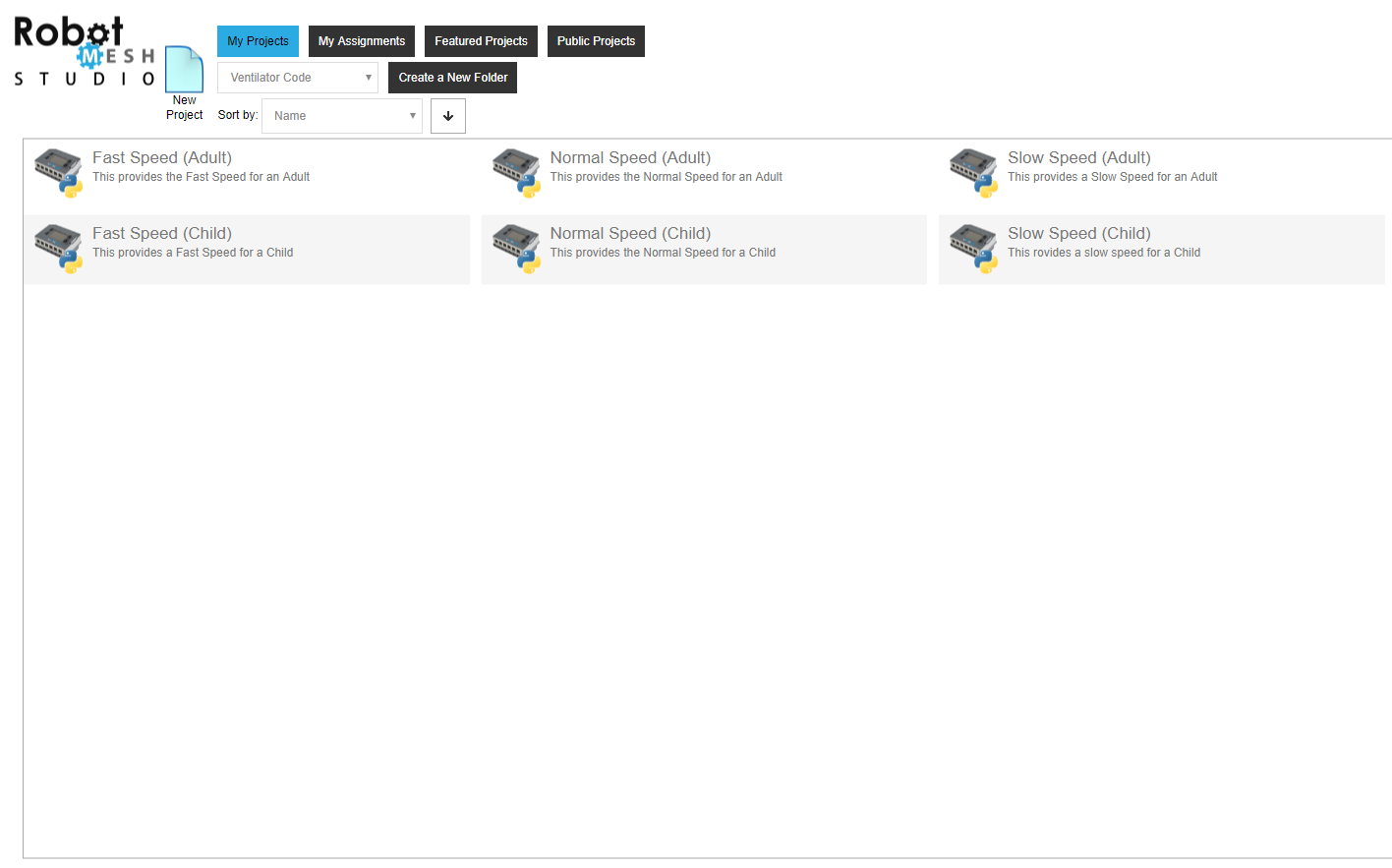
CODE:
Fast Speed (Adult): https://www.robotmesh.com/studio/5e87…
Fast Speed (Child): https://www.robotmesh.com/studio/5e87…
Normal Speed (Adult): https://www.robotmesh.com/studio/5e84…
Normal Speed (Child): https://www.robotmesh.com/studio/5e87…
Slow Speed (Adult): https://www.robotmesh.com/studio/5e87…
Slow Speed (Child): https://www.robotmesh.com/studio/5e87…




{kind=link}
Comments
Please log in or sign up to comment.