// MADE BY VINICIUS LOPES
#include <Ultrasonic.h>
#include "LedControl.h"
#include "binary.h"
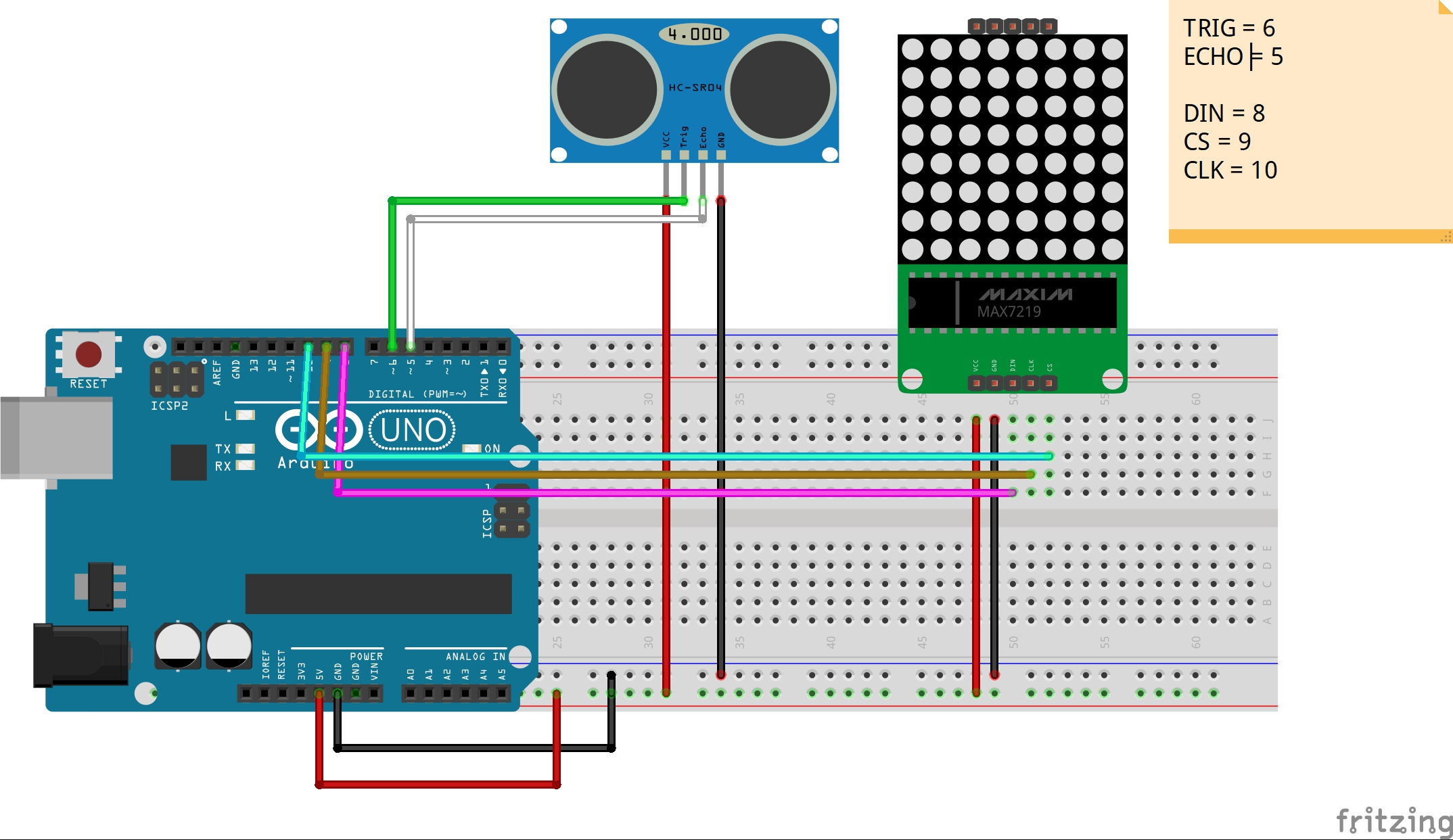
Ultrasonic sensor (6,5);// PIN 6 = TRIG // PIN 5 = ECHO
LedControl lc = LedControl(8,10,9,1);// DIN = 8 // CS = 9 // CLK = 10
unsigned long delaytime=1000;
// PIN 6 = TRIG // PIN 5 = ECHO
// DIN = 8 // CS = 9 // CLK = 10
byte ff[8]= {
B00111100,
B01000010,
B10010101,
B10100001,
B10100001,
B10010101,
B01000010,
B00111100
};
byte ft[8]= {
B00111100,
B01000010,
B10100101,
B10010001,
B10010001,
B10100101,
B01000010,
B00111100};
void setup() {
lc.shutdown(0,false);
lc.setIntensity(0,8);
lc.clearDisplay(0);
}
void desenhaFaces(){
}
void loop(){
int dist = sensor.Ranging(CM);
if(dist<30){
lc.setRow(0,0,ff[0]);
lc.setRow(0,1,ff[1]);
lc.setRow(0,2,ff[2]);
lc.setRow(0,3,ff[3]);
lc.setRow(0,4,ff[4]);
lc.setRow(0,5,ff[5]);
lc.setRow(0,6,ff[6]);
lc.setRow(0,7,ff[7]);
}else{
lc.setRow(0,0,ft[0]);
lc.setRow(0,1,ft[1]);
lc.setRow(0,2,ft[2]);
lc.setRow(0,3,ft[3]);
lc.setRow(0,4,ft[4]);
lc.setRow(0,5,ft[5]);
lc.setRow(0,6,ft[6]);
lc.setRow(0,7,ft[7]);
}delay(100);
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








{kind=link}
Comments
Please log in or sign up to comment.