Another Useless Box. I saw it on the internet and I decided to make one myself.I had a lot of fun building and playing.
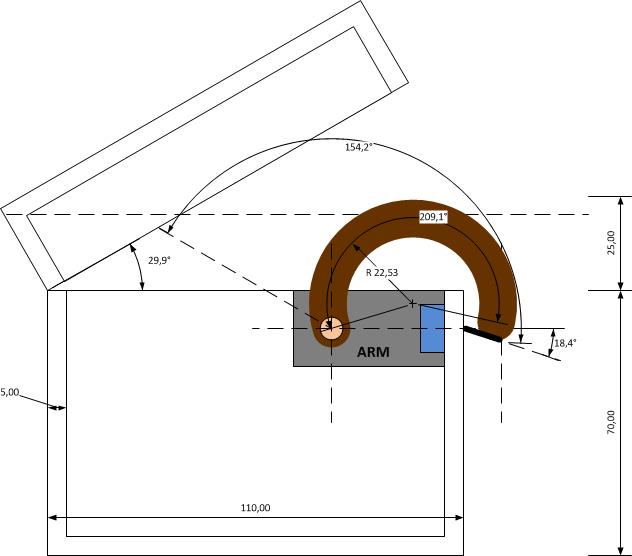
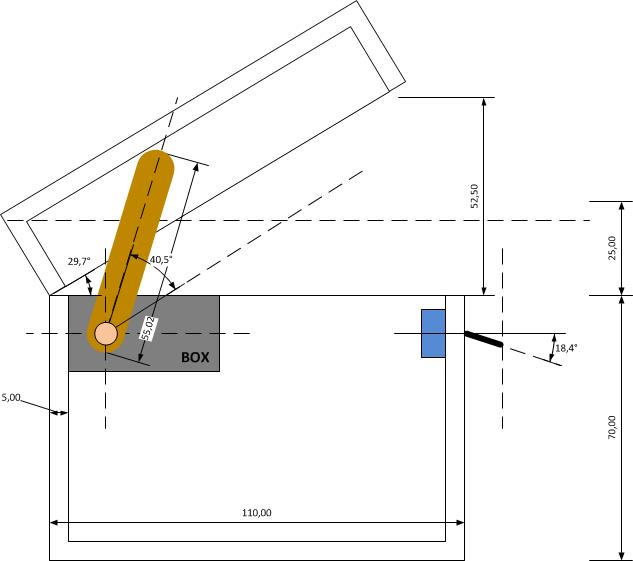
Is the old code you can find easily, but with some minor improvements that worked for me. Thanks a lot to the one who wrote it, this guy really knows FUN. Here are few drawings I made. Even tho the construction is completely customizable, I post them for the ones interested, because I couldn't find anything similar to start with.
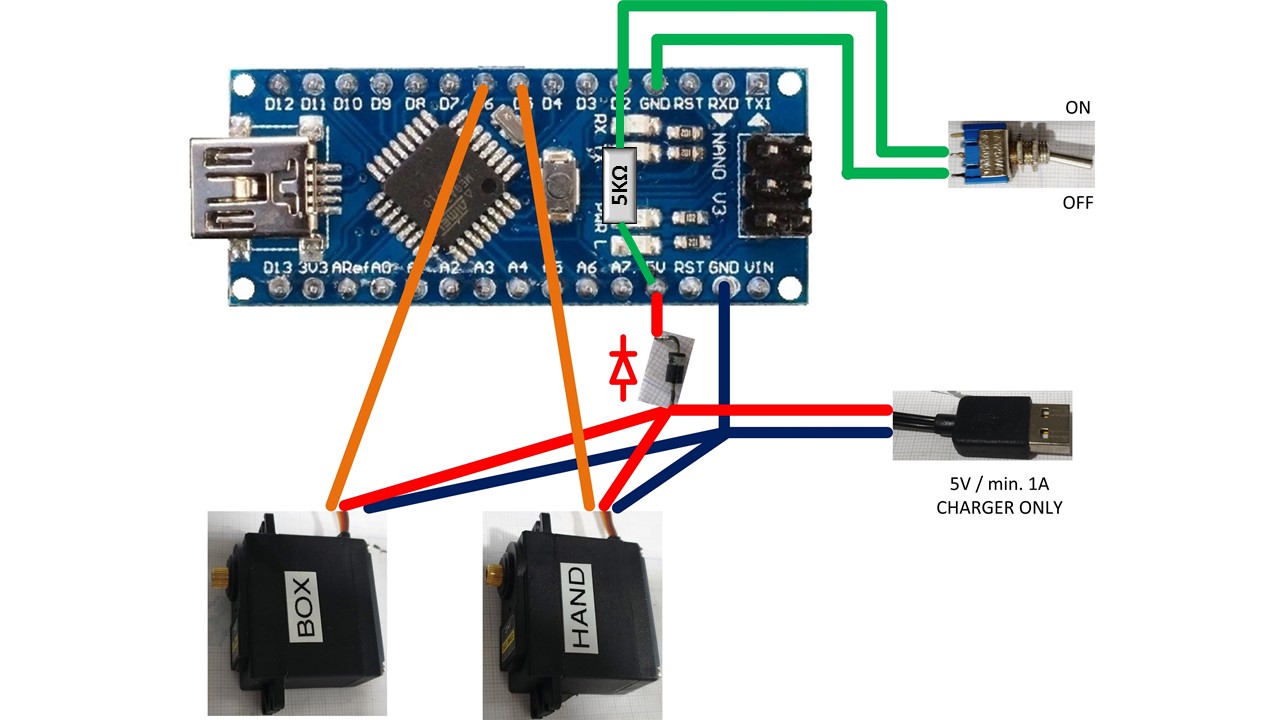
The electric diagram is also a bit adapted to my preferences. I opted out for USB power (phone charger or power bank) instead of batteries, thru a diode to 5V pin. This prevents the servomotors to be powered when the board is plugged in to computer USB for programming, because the current draw would be too high.
Leave a comment on YouTube or give me an email (YO3RAK at gmail.com) for more information, because this platform does't inform me of new comments.
Watch it on YouTube














{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.