My headlight controller was bad. I chose to design a new one because the original is obsolete. This is a very inexpensive design that also allows the builder to understand how the controller works and can easily repair it themselves if needed.
The original controller uses two signal wires to select operation, one to "open" the doors while another one "closes" the doors. These are provided by the dash switch. I used this same interface to minimize any changes to the car.
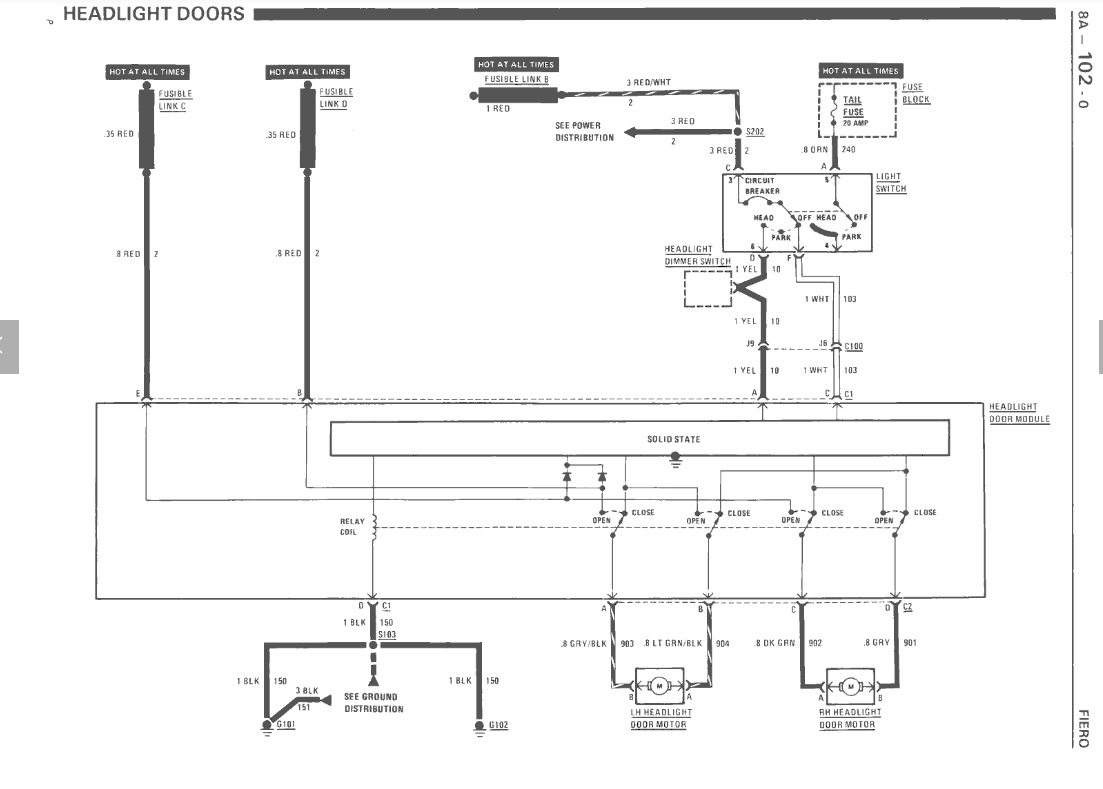
The original controller uses an H bridge made for a 4PDT relay and two MOSFETs to turn on the motors; the H bridge allows for polarity reversal when lowering the lights/doors. The main problem with the original design is that the relay is underrated for the current that is required and the MOSFETs are prone to overheating that causes permanent damage when the doors are opened too often in a short period of time. Over the years many of the MOSFETs have failed as well as relays and the MOSFETs are extremely difficult to find. The relay is also hard to find because it is 4PDT yet alternates are available. My design uses four SPDT relays rated for higher current that are readily available because that is a more common format; virtually any SPDT with 5VDC coils can be substituted for them. MOSFETs are not used; there isn't any real advantage to them in this type of design because turn-on time isn't critical; they were used in order to limit the components necessary to sense overcurrent (stalling) conditions which is one of the reasons they fail so often. Instead, Hall effect current sensors are used making the MOSFET approach moot.
The original controller draws a slight amount of current when the lights are switched off and the engine isn't running. This isn't a problem in general since the current on the battery is so low. I incorporated a power relay that removes ALL current to my design when the car is off; the power relay is controlled by the headlight switch in the car and when the lights are switched on the Arduino powers up and then controls the power relay which keeps the circuit alive. When the headlight switch is turned off the Arduino lowers the lights and turns off the power relay which then removes ALL power to the module.
I installed mine so that I could easily remove it from the car should I ever wish to install an original controller module instead yet it has worked so well without fail for years so I doubt I will pursue that. See the Arduino file for my approach and further information.












{kind=link}
Comments
Please log in or sign up to comment.