/*
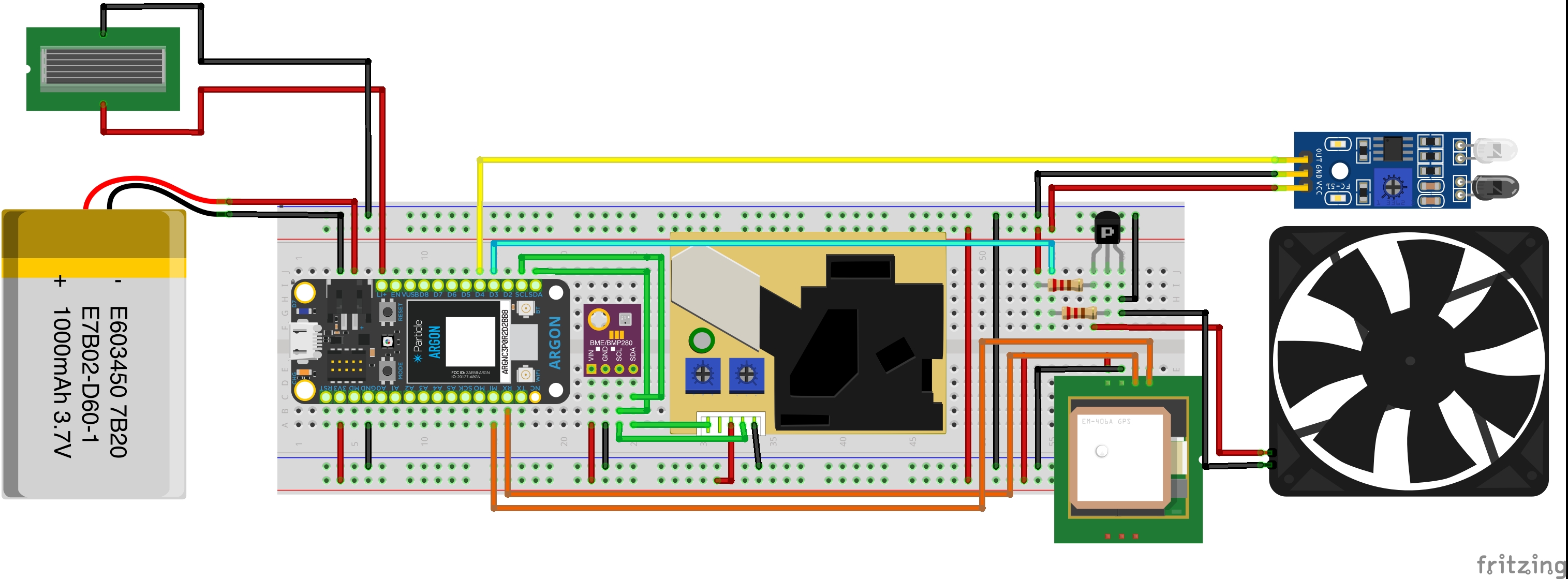
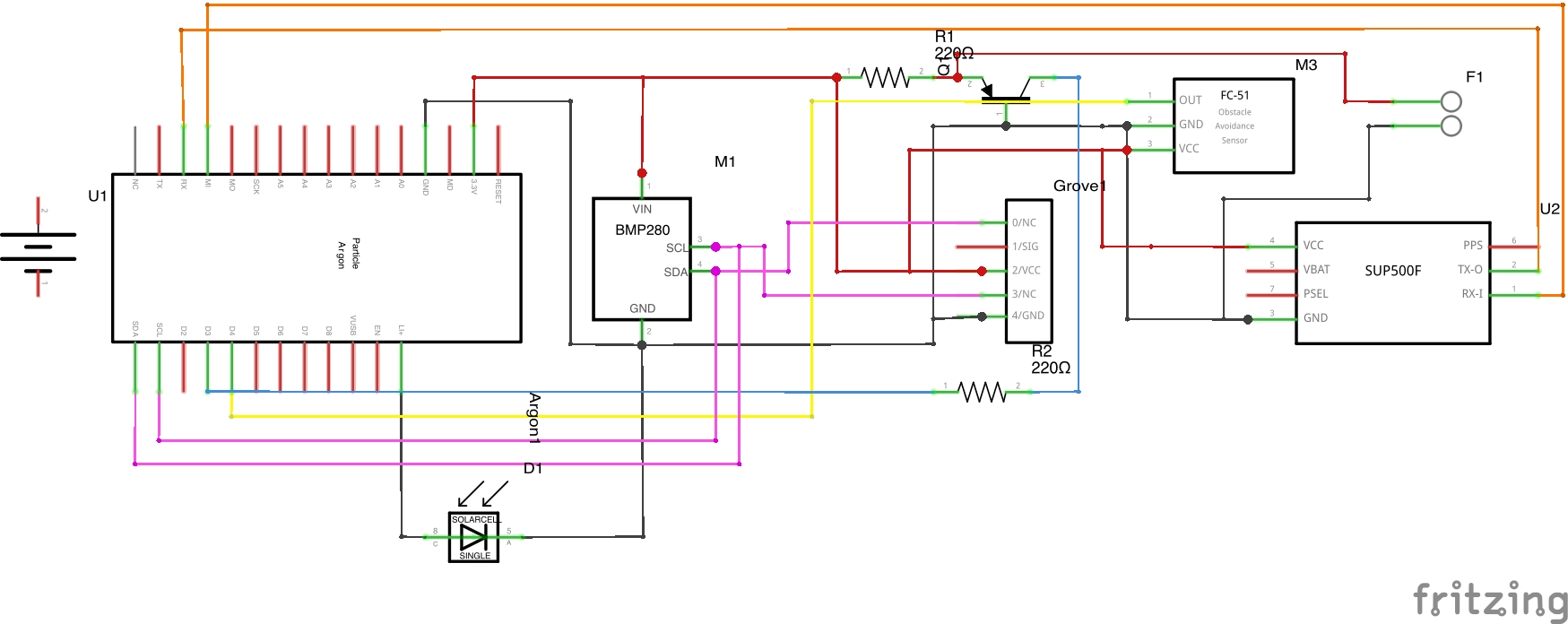
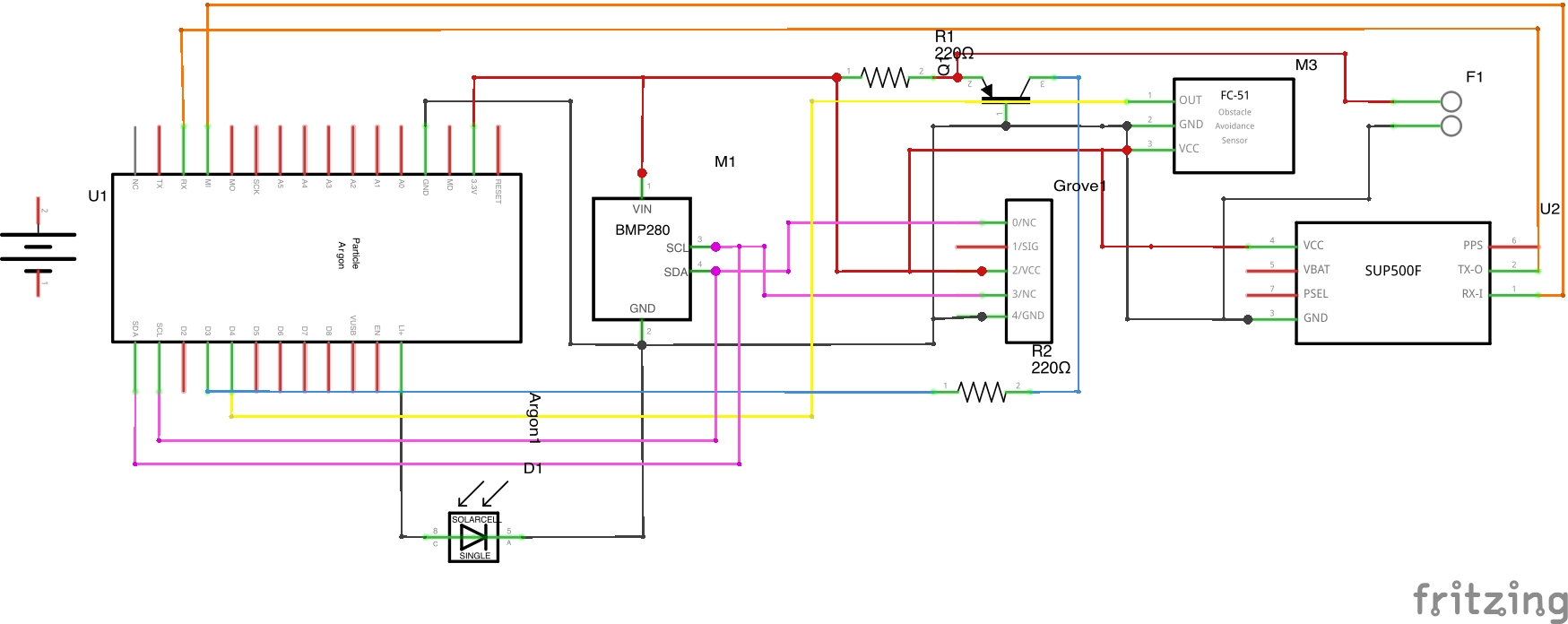
* Project ForestAlert_Fire_Warning_System
* Description: Early Warning Forest Fire Detection System
* Author: Wesley Eccles <<www.wesleyeccles.com>>
* Date: May 20, 2021
*
*/
#include <Seeed_HM330X.h>
#include <Adafruit_BME280.h>
#include <TinyGPS++/TinyGPS++.h>
#include <JsonParserGeneratorRK.h>
#include <Adafruit_MQTT.h>
#include "Adafruit_MQTT/Adafruit_MQTT.h"
#include "Adafruit_MQTT/Adafruit_MQTT_SPARK.h"
#include "Adafruit_MQTT/Adafruit_MQTT.h"
#include "credential.h"
SYSTEM_MODE ( SEMI_AUTOMATIC );
//BLUETOOTH
const BleUuid serviceUuid ("6E400001-B5A3-F393-E0A9-E50E24DCCA9E");
const BleUuid rxUuid ("6E400002-B5A3-F393-E0A9-E50E24DCCA9E");
const BleUuid txUuid ("6E400003-B5A3-F393-E0A9-E50E24DCCA9E");
BleCharacteristic txCharacteristic("tx", BleCharacteristicProperty::NOTIFY ,txUuid ,serviceUuid );
BleCharacteristic rxCharacteristic("rx", BleCharacteristicProperty::WRITE_WO_RSP ,rxUuid ,serviceUuid ,onDataReceived ,NULL);
BleAdvertisingData data;
const size_t UART_TX_BUF_SIZE = 19;
uint8_t txBuf[UART_TX_BUF_SIZE]= "Pixel Number = ";
//ADAFRUIT.IO
TCPClient TheClient;
// Setup the MQTT client class by passing in the WiFi client and MQTT server and login details.
Adafruit_MQTT_SPARK mqtt(&TheClient,AIO_SERVER,AIO_SERVERPORT,AIO_USERNAME,AIO_KEY);
/****************************** Feeds ***************************************/
// Setup Feeds to publish or subscribe
// Notice MQTT paths for AIO follow the form: <username>/feeds/<feedname>
// Adafruit_MQTT_Subscribe GPS = Adafruit_MQTT_Subscribe(&mqtt, AIO_USERNAME "/feeds/gps");
Adafruit_MQTT_Subscribe IRSENSOR = Adafruit_MQTT_Subscribe(&mqtt, AIO_USERNAME "/feeds/Ir_Sensor");
Adafruit_MQTT_Subscribe DELAYFREQUENCY = Adafruit_MQTT_Subscribe(&mqtt, AIO_USERNAME "/feeds/Reading_Frequency");
Adafruit_MQTT_Publish GPS = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/gps");
Adafruit_MQTT_Publish SAT = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/sat_num");
Adafruit_MQTT_Publish TEMP = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/fire_temp");
Adafruit_MQTT_Publish HUMIDITY = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/fire_hum");
Adafruit_MQTT_Publish FIREALERT = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/Fire_Status");
int last, lastTime;
bool buttonState,fireSent;
//SYSTEM
const int LEDPIN= D7;
unsigned int currentTime, lastTimeMain;
unsigned int TIMEDELAY= 30000; //Delay time for how often the system will send data to cloud (ms)
//FIRE IR SENSOR--------------------------------------------------------------------------------------
const int IRPIN_A= A0;
const int IRPIN_D= A1;
bool FireAlert,IRSensor;
//AIR CURCULATION FAN--------------------------------------------------------------------------------------
const int FANPIN = A3;
//LASER PARTICLE SENSOR------------------------------------------------------------------------------------
#define SERIAL_OUTPUT Serial
HM330X sensor;
uint8_t buf[30];
const char* str[] = {"sensor num: ", "PM1.0 concentration(CF=1,Standard particulate matter,unit:ug/m3): ",
"PM2.5 concentration(CF=1,Standard particulate matter,unit:ug/m3): ",
"PM10 concentration(CF=1,Standard particulate matter,unit:ug/m3): ",
"PM1.0 concentration(Atmospheric environment,unit:ug/m3): ",
"PM2.5 concentration(Atmospheric environment,unit:ug/m3): ",
"PM10 concentration(Atmospheric environment,unit:ug/m3): ",
};
//BME280---------------------------------------------------------------------------------------------------
#define SEALEVELPRESSURE_HPA (1013.25)
Adafruit_BME280 bme; // I2C
unsigned long delayTime;
unsigned status;
// GPS --------------------------------------------------------------------------------------------------
TinyGPSPlus gps;
const int UTC_offset = -6;
unsigned long lastSerial = 0;
unsigned long lastPublish = 0;
unsigned long startFix = 0;
bool gettingFix = false;
float lat,lon,alt;
SYSTEM_THREAD(ENABLED);
const unsigned long PUBLISH_PERIOD = 1000;
const unsigned long SERIAL_PERIOD = 5000;
const unsigned long MAX_GPS_AGE_MS = 1000; // GPS location must be newer than this to be considered valid
void setup() {
Serial.begin(9600);
delay(1000);
Serial.println("Serial start");
//BLuetooth
BLE.on();
Serial.printf("Argon BLE Address: %s\n", BLE.address().toString().c_str());
BLE.addCharacteristic(txCharacteristic);
BLE.addCharacteristic(rxCharacteristic);
data.appendServiceUUID(serviceUuid);
BLE.advertise(&data);
//WIFI
Serial.printf("Connecting to Internet \n");
WiFi.connect();
while(WiFi.connecting()) {
Serial.printf(".");
delay(100);
}
Serial.printf("\nConnected!!!!!! \n");
// Setup MQTT subscription for onoff feed.
mqtt.subscribe(&DELAYFREQUENCY);
mqtt.subscribe(&IRSENSOR);
//GPS
Serial1.begin(9600);
startFix = millis();
gettingFix = true;
//LASER PARTICLE SENSOR
if (sensor.init()) {
Serial.println("HM330X init failed!!!");
while (1);
}
//AIR FAN
pinMode(FANPIN,OUTPUT);
//IR SENSOR
pinMode(IRPIN_A,INPUT);
pinMode(IRPIN_D,INPUT);
attachInterrupt(IRPIN_D, FIREFIRE , RISING );
//BME280
status = bme.begin();
if (!status){
Serial.println("Could not find a valid BME280 sensor, check wiring, address, sensor ID!");
Serial.print("SensorID was: 0x");
Serial.println(bme.sensorID(), 16);
Serial.print(" ID of 0xFF probably means a bad address, a BMP 180 or BMP 085\n");
Serial.print(" ID of 0x56-0x58 represents a BMP 280,\n");
Serial.print(" ID of 0x60 represents a BME 280.\n");
Serial.print(" ID of 0x61 represents a BME 680.\n");
while (1);
}
//LED Light
pinMode(LEDPIN,OUTPUT);
for (int i=0; i<5; i++){
digitalWrite(LEDPIN,HIGH);
delay(500);
digitalWrite(LEDPIN,LOW);
delay(250);
}
}
void loop() {
KeepConnection(); //Keep Connection to the cloud alive
MQTT_connect(); //Keep Connection to the cloud alive
Subscribe();
if (FireAlert && IRSensor){
if(mqtt.Update()) {
FIREALERT.publish("w:fire");
Serial.printf("FIRE FIRE FIRE -IR LIGHT DETECTED Sending Data \n");
fireSent=1;
}
lastTimeMain=0;
FireAlert=0;
}
if (millis()-lastTimeMain > TIMEDELAY){
Serial.printf("STARTING Collecting Data\n");
CirculateAir(5000); //Turn on the fan to fill chamber with putside air
LaserPMRead(); //Collect the data from the laser PM Sensor
GetGPS(); //Gather GPS Data and if valid send to Cloud
SendEnviroData(); //Send temp + Humidity to Cloud
lastTimeMain=millis();
if (!fireSent){
FIREALERT.publish("tree");
Serial.printf("No Fire Detected \n");
}
else {
fireSent=0;
}
Serial.printf("FINISHED Collecting Data\n\n");
}
}
//LASER PARTICLE SENSOR------------------------------------------------------------------
void LaserPMRead(){
int PM2;
int PM10;
if (sensor.read_sensor_value(buf, 29)) {
SERIAL_OUTPUT.println("HM330X read result failed!!!");
}
PM2 = (uint16_t) buf[6 * 2] << 8 | buf[6 * 2 + 1];
PM10 = (uint16_t) buf[7 * 2] << 8 | buf[7 * 2 + 1];
Serial.printf("PM2 =%i PM10 =%i \n",PM2,PM10);
if (PM2 > 300 || PM10 > 950){
FIREALERT.publish("w:fire");
Serial.printf("FIRE FIRE FIRE -PM DETECTED Sending Data \n");
fireSent=1;
}
}
void CirculateAir (unsigned int _runTime){ //Funtion needs to keep being called to check against time
digitalWrite(FANPIN,HIGH); //Start the fan when funtion is called
delay(_runTime); //Time set to fill chamber with outside air
digitalWrite(FANPIN,LOW);
delay(1000); //Let the air in the chamber settle before taking data
}
void GetGPS(){
// This sketch displays information every time a new sentence is correctly encoded.
while (Serial1.available() > 0) {
if (gps.encode(Serial1.read())) {
displayInfo();
}
}
}
void displayInfo() {
float lat,lon,alt;
uint8_t hr,mn,se,sat;
if (millis() - lastSerial >= SERIAL_PERIOD) {
lastSerial = millis();
char buf[128];
if (gps.location.isValid() && gps.location.age() < MAX_GPS_AGE_MS) {
digitalWrite(LEDPIN,HIGH);
lat = gps.location.lat();
lon = gps.location.lng();
alt = gps.altitude.meters();
hr = gps.time.hour();
mn = gps.time.minute();
se = gps.time.second();
sat = gps.satellites.value();
if(hr > 7) {
hr = hr + UTC_offset;
}
else {
hr = hr + 24 + UTC_offset;
}
if (gettingFix) {
gettingFix = false;
unsigned long elapsed = millis() - startFix;
Serial.printlnf("%lu milliseconds to get GPS fix", elapsed);
}
createEventPayLoad(lat,lon,alt,sat);
}
else {
digitalWrite(LEDPIN,LOW);
Serial.println("No Location ");
strcpy(buf, "no location");
if (!gettingFix) {
gettingFix = true;
startFix = millis();
}
}
}
}
void createEventPayLoad ( float _lat , float _lon, float _alt, int _sat) { //Create a JSON for Adafruit.io of GPS Data
char GPSBuffer [50];
sprintf(GPSBuffer,"{\"lat\":%f,\"lon\":%f,\"ele\":%f}",_lat,_lon,_alt);
if(mqtt.Update()) {
SAT.publish(_sat);
Serial.printf("Satelites: %i \n", _sat );
GPS.publish(GPSBuffer);
Serial.printf("Publishing JSON GPS: %s \n", GPSBuffer );
}
}
void MQTT_connect(){
int8_t ret;
// Stop if already connected.
if (mqtt.connected()) {
return;
}
Serial.print("Connecting to MQTT... ");
while ((ret = mqtt.connect()) != 0) { // connect will return 0 for connected
Serial.println(mqtt.connectErrorString(ret));
Serial.println("Retrying MQTT connection in 5 seconds...");
mqtt.disconnect();
delay(5000); // wait 5 seconds
}
Serial.println("MQTT Connected!");
}
void KeepConnection(){
// Validate connected to MQTT Broker
MQTT_connect();
// Ping MQTT Broker every 2 minutes to keep connection alive
if ((millis()-last)>120000) {
Serial.printf("Pinging MQTT \n");
if(! mqtt.ping()) {
Serial.printf("Disconnecting \n");
mqtt.disconnect();
}
last = millis();
}
}
float tempF(){
float _tempF;
float _tempC;
_tempC = bme.readTemperature();
_tempF = (_tempC*1.8)+32;
return _tempF;
}
int Humidity(){
int _humidity;
_humidity= bme.readHumidity();
return _humidity;
}
void SendEnviroData(){
SendBT();
if(mqtt.Update()) {
TEMP.publish(tempF());
Serial.printf("Publishing TempF %.1ff\n",tempF());
HUMIDITY.publish(Humidity());
Serial.printf("Publishing Humidity %i%%\n",Humidity());
if (tempF() > 125 || Humidity() < 12){
FIREALERT.publish("w:fire");
Serial.printf("FIRE FIRE FIRE -TEMP HUMIDITY DETECTED Sending Data \n");
fireSent=1;
}
}
}
void Subscribe(){
Adafruit_MQTT_Subscribe *subscription;
while ((subscription = mqtt.readSubscription(500))) {
if (subscription == &DELAYFREQUENCY) {
TIMEDELAY = (atoi((char *)DELAYFREQUENCY.lastread))*1000;
}
if (subscription == &IRSENSOR) {
IRSensor = atoi((char *)IRSENSOR.lastread);
}
}
}
void FIREFIRE(){ //Interupt Pin if the IR Light sees fire to send one last signal that there is a fire before burning
FireAlert=1;
}
void SendBT(){
char tempHumBuf[12];
uint8_t tempHumBufData[12];
int tempAndMoistureLen;
sprintf(tempHumBuf,"%05.0f,%05i\n",tempF()*100,Humidity());
tempAndMoistureLen = strlen(tempHumBuf);
for (int i=0; i<12; i++){
tempHumBufData[i]= tempHumBuf[i];
Serial.printf ("%c",tempHumBufData[i]);
}
txCharacteristic.setValue (tempHumBufData, 12 );
Serial.printf ("\n");
}
void onDataReceived(const uint8_t* data, size_t len, const BlePeerDevice& peer , void* context) {
size_t i;
int pos=0;
Serial.printf("Received data from: %02X :%02X :%02X :%02X :%02X :%02X \n", peer.address()[0], peer.address()[1] ,peer.address()[2] , peer.address()[3] ,peer.address()[4] ,peer.address()[5]) ;
}

















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments