


Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
| ||||||
A superset of the Robotics Operating System (ROS 2), the Kria Robotics Stack (KRS), is a set of libraries and utilities for hardware acceleration of robotics applications on the Kria SoM family of AMD-Xilinx chips. When you think about all of the cool machine learning and AI applications the Kria KV260 has become known for, one of the natural next steps to take those applications in are into the robotics world. What can that AI/ML do when it has physical access to the work by means of motors, servos, ping sensors, and any of your other favorite robotics hardware?
The KRS libraries/utilities are the hooks for motors and hardware to be integrated into the hardware accelerated development platform. KRS enables hardware acceleration in ROS2 by means of a combination of modern C++ and High-Level Synthesis (HLS). In simplistic terms, KRS is taking something like the motor controller library on Arduino and giving it an exponential speed/power boost by running it in the programmable logic of the Kria SoM (FPGA). It is very new so the installation is very manual, which makes it worth its own project post with a quick demo.
Note: This project assumes that you already have Vivado, Vitis, & PetaLinux 2021.2 already installed (see my install guide for these here).
Install ROS 2There are currently two releases of KRS: alpha and beta. I chose to go with KRS beta. This is important to note here as it dictates which distribution of ROS 2 that needs to be installed. KRS alpha is built on ROS Foxy Fitzroy and KRS beta is built on Rolling Ridley.
First, verify that the locale on the host machine supports UTF-8:
~$ localeThe return should look something like this:
LANG=en_US.UTF-8
LANGUAGE=
LC_CTYPE="en_US.UTF-8"
LC_NUMERIC="en_US.UTF-8"
LC_TIME="en_US.UTF-8"
LC_COLLATE="en_US.UTF-8"
LC_MONETARY="en_US.UTF-8"
LC_MESSAGES="en_US.UTF-8"
LC_PAPER="en_US.UTF-8"
LC_NAME="en_US.UTF-8"
LC_ADDRESS="en_US.UTF-8"
LC_TELEPHONE="en_US.UTF-8"
LC_MEASUREMENT="en_US.UTF-8"
LC_IDENTIFICATION="en_US.UTF-8"
LC_ALL=Next, enable the Universe repository in the Linux host machine:
~$ sudo apt install software-properties-common
~$ sudo add-apt-repository universeThen add the ROS 2 Rolling apt repository and authorize the ROS GPG with apt:
~$ sudo apt update && sudo apt install curl gnupg lsb-release
~$ sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpgAdd the ROS 2 Rolling repository to the sources list:
~$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/nullUpdate the apt repository now that the ROS 2 Rolling repository has been added:
~$ sudo apt updateThen install the desktop version of ROS 2 Rolling:
~$ sudo apt install ros-rolling-desktopFor troubleshooting or how to uninstall ROS 2 Rolling, see here.
Install KRS DependenciesStart the KRS installation by installing the required dependencies for KRS:
~$ sudo apt-get -y install curl build-essential libssl-dev git wget ocl-icd-* opencl-headers python3-vcstool python3-colcon-common-extensions python3-colcon-mixin kpartx u-boot-tools pv libgazebo11-devThis will update any of the packages that you might already have installed as well as install the ones not currently installed.
Note: these dependencies also cover KRS alpha.
Create ROS 2 WorkspaceSince KRS is a superset of libraries/utilities built on top of ROS 2, create a directory for a ROS 2 workspace to build KRS in and change directories into it:
~$ mkdir -p ~/krs_ws/src
~$ cd ~/krs_wsAs a high level overview: KRS will be installed in this krs_ws directory as a ROS overlay workspace. Since ROS 2 is installed in /opt/ros/ and thus owned by root, A ROS overlay workspace is a directory that is created somewhere in the home directory such that a user can make changes to source code, compile it, and add custom packages to it (KRS in this case) is necessary.
Create KRS Repo FileSince KRS is still pretty early on in development, we do have to make our own repository source file for it. Create a new file with your text editor of choice and copy the following into it:
repositories:
ros2/ament_lint:
type: git
url: https://github.com/ament/ament_lint
version: master
ros2/launch:
type: git
url: https://github.com/ros2/launch
version: master
ros2/gazebo_ros_pkgs:
type: git
url: https://github.com/ros-simulation/gazebo_ros_pkgs
version: da14a69e79502cd08064ccd261366ff023a9162a
perception/image_common:
type: git
url: https://github.com/ros-perception/image_common
version: 9729de81f7dff6156f644d6152b200f687360f1f
perception/image_pipeline:
type: git
url: https://github.com/ros-acceleration/image_pipeline
version: beta
perception/vision_opencv:
type: git
url: https://github.com/ros-perception/vision_opencv
version: 7bbc5ecc232e8faf36b45efaa2b6bc979b04157f
tracing/ros2_tracing:
type: git
url: https://gitlab.com/ros-tracing/ros2_tracing.git
version: master
tracing/tracetools_acceleration:
type: git
url: https://github.com/ros-acceleration/tracetools_acceleration
version: main
acceleration/acceleration_firmware:
type: git
url: https://github.com/ros-acceleration/acceleration_firmware
version: main
acceleration/acceleration_firmware_kv260:
type: zip
url: https://github.com/ros-acceleration/acceleration_firmware_kv260/releases/download/v0.9.0/acceleration_firmware_kv260.zip
acceleration/adaptive_component:
type: git
url: https://github.com/ros-acceleration/adaptive_component
version: main
acceleration/ament_acceleration:
type: git
url: https://github.com/ros-acceleration/ament_acceleration
version: main
acceleration/ament_vitis:
type: git
url: https://github.com/ros-acceleration/ament_vitis
version: beta
acceleration/colcon-acceleration:
type: git
url: https://github.com/ros-acceleration/colcon-acceleration
version: main
acceleration/ros2_kria:
type: git
url: https://github.com/ros-acceleration/ros2_kria
version: main
acceleration/ros2acceleration:
type: git
url: https://github.com/ros-acceleration/ros2acceleration
version: main
acceleration/vitis_common:
type: git
url: https://github.com/ros-acceleration/vitis_common
version: master
acceleration/acceleration_examples:
type: git
url: https://github.com/ros-acceleration/acceleration_examples
version: betaSave the file as krs_rolling.repos in ./krs_ws or create it directly from the command line:
cat << 'EOF' > krs_rolling.repos
repositories:
ros2/ament_lint:
type: git
url: https://github.com/ament/ament_lint
version: master
ros2/launch:
type: git
url: https://github.com/ros2/launch
version: master
ros2/gazebo_ros_pkgs:
type: git
url: https://github.com/ros-simulation/gazebo_ros_pkgs
version: da14a69e79502cd08064ccd261366ff023a9162a
perception/image_common:
type: git
url: https://github.com/ros-perception/image_common
version: 9729de81f7dff6156f644d6152b200f687360f1f
perception/image_pipeline:
type: git
url: https://github.com/ros-acceleration/image_pipeline
version: beta
perception/vision_opencv:
type: git
url: https://github.com/ros-perception/vision_opencv
version: 7bbc5ecc232e8faf36b45efaa2b6bc979b04157f
tracing/ros2_tracing:
type: git
url: https://gitlab.com/ros-tracing/ros2_tracing.git
version: master
tracing/tracetools_acceleration:
type: git
url: https://github.com/ros-acceleration/tracetools_acceleration
version: main
acceleration/acceleration_firmware:
type: git
url: https://github.com/ros-acceleration/acceleration_firmware
version: main
acceleration/acceleration_firmware_kv260:
type: zip
url: https://github.com/ros-acceleration/acceleration_firmware_kv260/releases/download/v0.9.0/acceleration_firmware_kv260.zip
acceleration/adaptive_component:
type: git
url: https://github.com/ros-acceleration/adaptive_component
version: main
acceleration/ament_acceleration:
type: git
url: https://github.com/ros-acceleration/ament_acceleration
version: main
acceleration/ament_vitis:
type: git
url: https://github.com/ros-acceleration/ament_vitis
version: beta
acceleration/colcon-acceleration:
type: git
url: https://github.com/ros-acceleration/colcon-acceleration
version: main
acceleration/ros2_kria:
type: git
url: https://github.com/ros-acceleration/ros2_kria
version: main
acceleration/ros2acceleration:
type: git
url: https://github.com/ros-acceleration/ros2acceleration
version: main
acceleration/vitis_common:
type: git
url: https://github.com/ros-acceleration/vitis_common
version: master
acceleration/acceleration_examples:
type: git
url: https://github.com/ros-acceleration/acceleration_examples
version: beta
EOFImport the KRS beta release repositories:
~/krs_ws$ vcs import src --recursive < krs_rolling.reposThis will take a few minutes depending on the configuration of the host PC.
To build the KRS workspace, start by sourcing the Vitis and ROS 2 environments:
~/krs_ws$ source /tools/Xilinx/Vitis/2021.2/settings64.sh
~/krs_ws$ source /opt/ros/rolling/setup.bashExport to the system path:
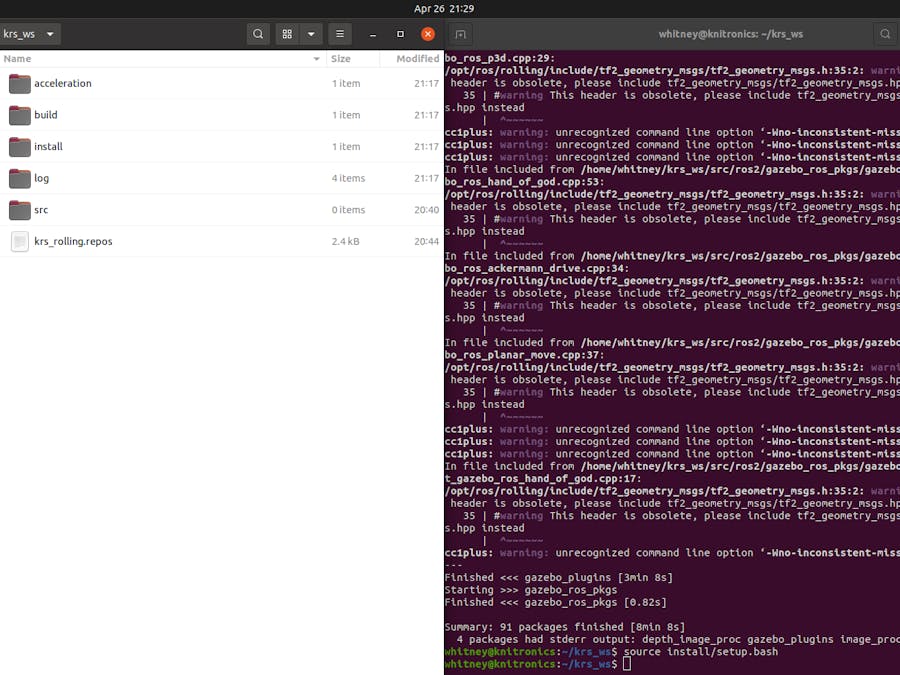
~/krs_ws$ export PATH="/usr/bin":$PATHThen use the ROS build tool, colcon, to build and install KRS (again, this will take a few minutes depending on the configuration of the host PC):
~/krs_ws$ colcon build --merge-installI got a few warnings on the outputs, a few about unused variables which is nothing to worry about. But I did get a few warnings about obsolete headers which may cause me some heartburn in the future but we'll see. If so, I can simply install ROS Foxy Fitzroy (see installation instructions here) then create a new ROS workspace to install KRS alpha to:
~$ mkdir -p ~/krs_ws_alpha/src
~$ cd ~/krs_ws_alphaFollow my same steps above for KRS alpha except use the following for the repo file:
cat << 'EOF' > krs_alpha.repos
repositories:
acceleration/acceleration_firmware:
type: git
url: https://github.com/ros-acceleration/acceleration_firmware
version: 0.4.0
acceleration/acceleration_firmware_kv260:
type: zip
url: https://www.xilinx.com/bin/public/openDownload?filename=acceleration_firmware_kv260.zip
acceleration/colcon-acceleration:
type: git
url: https://github.com/ros-acceleration/colcon-acceleration
version: 0.3.0
acceleration/ros2acceleration:
type: git
url: https://github.com/ros-acceleration/ros2acceleration
version: 0.2.0
acceleration/ament_vitis:
type: git
url: https://github.com/ros-acceleration/ament_vitis
version: 0.5.0
acceleration/vitis_common:
type: git
url: https://github.com/ros-acceleration/vitis_common
version: 0.1.0
EOFThen download the alpha version of KRS using the alpha repo file:
~/krs_ws_alpha$ vcs import src --recursive < krs_alpha.reposKRS alpha should still work with Vitis and PetaLinux 2021.2 so the only difference in sourcing the environment to use it is sourcing ROS Foxy instead of ROS Rolling:
~/krs_ws_alpha$ source /tools/Xilinx/Vitis/2021.2/settings64.sh
~/krs_ws_alpha$ source /opt/ros/foxy/setup.bashThen add to path and build alpha the same as with beta:
~/krs_ws_alpha$ export PATH="/usr/bin":$PATH
~/krs_ws_alpha$ colcon build --merge-installIt is worth noting that with KRS beta, since it's being installed on ROS2 Rolling distribution, build warnings/errors should be expected to be dynamic since Rolling is a development distribution that is updating at some regular interval.
Source OverlayWhen a ROS workspace is built, a setup bash script is created that must be called when you want to use that workspace. Thus, to use KRS after installing it, call its setup bash script:
~/krs_ws$ source install/setup.bashRead more about ROS overlays here.
But that's all for the KRS install. Next will be using KRS to build for the Kria SoM!






Comments
Please log in or sign up to comment.