




Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
In this project we will use the Adafruit Starter Pack for Windows 10 IoT Core on Raspberry Pi 2 components to make a speaking light sensor. This will show how to use an MCP3008 Analog Digital Converter (ADC) chip to interface the Pi2 to three analog components. Two variable resistors (potentiometers) and one CdS photocell.
Hardware setup
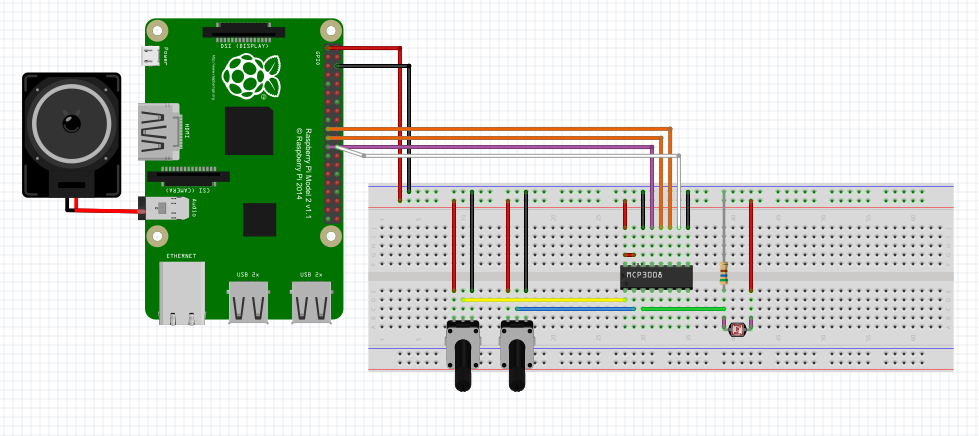
Connect the Raspberry Pi2 to the breadboard and the other components as per the Fritzing diagram below.
Note: While setting up the circuit, make sure your MCP3008 chip is oriented correctly. The chip has a half-moon shape marker along with a dot on one side. This should be oriented as shown in the diagram below.
Optional
If you have a pair of headphones with a 1/8" jack or a set of powered speakers with a 1/8" jack you can connect them to the Pi2 audio output jack to hear the prompts from the speech system.
Code
MainPage.cs
You can download the code starting project from https://github.com/ms-iot/adafruitsample and we will lead you through the addition of the code needed to talk to the web service and get your pin on the map. What map?
Open up "Lesson_204\StartSolution\Lesson_204.sln" and open the mainpage.xaml.cs file.
We have filled in a few methods as a starting point for you in this solution. If you want to jump ahead you can find a solution with all the code completed at:"Lesson_204\FullSolution\Lesson_204.sln"
Add the following lines at the top of the MainPage class.
// Use for configuration of the MCP3008 class voltage formula
const float ReferenceVoltage = 5.0F;
// Values for which channels we will be using from the ADC chip
const byte LowPotentiometerADCChannel = 0;
const byte HighPotentiometerADCChannel = 1;
const byte CDSADCChannel = 2;
// Some strings to let us know the current state.
const string JustRightLightString = "Ah, just right";
const string LowLightString = "I need a light";
const string HighLightString = "I need to wear shades";
// Some internal state information
enum eState { unknown, JustRight, TooBright, TooDark};
eState CurrentState = eState.unknown;
// Our ADC Chip class
MCP3008 mcp3008 = new MCP3008(ReferenceVoltage);
// The Windows Speech API interface
private SpeechSynthesizer synthesizer;
// A timer to control how often we check the ADC values.
public Timer timer;
Now add these lines to the MainPage constructor to setup the windows speech synthesizer and the ADC chip.
// Create a new SpeechSynthesizer instance for later use.
synthesizer = new SpeechSynthesizer();
// Initialize the ADC chip for use
mcp3008.Initialize();
Now add these lines to the OnNavigatedTo method. This will setup a timer callback which will call our code once per second on a different thread.
If you do not want to add a pin onto the map, remove MakePinWebAPICall();
protected override void OnNavigatedTo(NavigationEventArgs navArgs)
{
Debug.WriteLine("MainPage::OnNavigatedTo");
MakePinWebAPICall();
// We will check for light level changes once per second (1000 milliseconds)
timer = new Timer(timerCallback, this, 0, 1000);
}
Now we have the timer callback being called lets fill it out.
private async void timerCallback(object state)
{
Debug.WriteLine("\nMainPage::timerCallback");
if (mcp3008 == null)
{
Debug.WriteLine("MainPage::timerCallback not ready");
return;
}
// The new light state, assume it's just right to start.
eState newState = eState.JustRight;
// Read from the ADC chip the current values of the two pots and the photo cell.
int lowPotReadVal = mcp3008.ReadADC(LowPotentiometerADCChannel);
int highPotReadVal = mcp3008.ReadADC(HighPotentiometerADCChannel);
int cdsReadVal = mcp3008.ReadADC(CDSADCChannel);
// convert the ADC readings to voltages to make them more friendly.
float lowPotVoltage = mcp3008.ADCToVoltage(lowPotReadVal);
float highPotVoltage = mcp3008.ADCToVoltage(highPotReadVal);
float cdsVoltage = mcp3008.ADCToVoltage(cdsReadVal);
// Let us know what was read in.
Debug.WriteLine(String.Format("Read values {0}, {1}, {2} ",
lowPotReadVal, highPotReadVal, cdsReadVal));
Debug.WriteLine(String.Format("Voltages {0}, {1}, {2} ",
lowPotVoltage, highPotVoltage, cdsVoltage));
// Compute the new state by first checking if the light level is too low
if (cdsVoltage < lowPotVoltage)
{
newState = eState.TooDark;
}
// And now check if it too high.
if (cdsVoltage > highPotVoltage)
{
newState = eState.TooBright;
}
// Use another method to determine what to do with the state.
await CheckForStateChange(newState);
}
We have filled in most of the CheckForStateChange code for you but you want to add the call to the TextToSpeech helper method.
// Use another method to wrap the speech synthesis functionality.
await TextToSpeech(whatToSay);
Now for the fun part of the speech API, making it talk! Modify the TextToSpeech method and add these lines.
async () =>
{
SpeechSynthesisStream synthesisStream;
// Creating a stream from the text which can be played using media element.
// This API converts text input into a stream.
synthesisStream = await synthesizer.SynthesizeTextToStreamAsync(textToSpeak);
// start this audio stream playing
media.AutoPlay = true;
media.SetSource(synthesisStream, synthesisStream.ContentType);
media.Play();
}
MCP3008.cs
This is the class which will wrap the ADC functionality.
First we will store the value of the reference voltage when we construct the new object.
public MCP3008(float referenceVolgate)
{
Debug.WriteLine("MCP3008::New MCP3008");
// Store the reference voltage value for later use in the voltage calculation.
ReferenceVoltage = referenceVolgate;
}
Then we will fill in the Initialize method to setup communication with the SPI bus controller.
try
{
// Setup the SPI bus configuration
var settings = new SpiConnectionSettings(SPI_CHIP_SELECT_LINE);
// 3.6MHz is the rated speed of the MCP3008 at 5v
settings.ClockFrequency = 3600000;
settings.Mode = SpiMode.Mode0;
// Ask Windows for the list of SpiDevices
// Get a selector string that will return all SPI controllers on the system
string aqs = SpiDevice.GetDeviceSelector();
// Find the SPI bus controller devices with our selector string
var dis = await DeviceInformation.FindAllAsync(aqs);
// Create an SpiDevice with our bus controller and SPI settings
mcp3008 = await SpiDevice.FromIdAsync(dis[0].Id, settings);
if (mcp3008 == null)
{
Debug.WriteLine(
"SPI Controller {0} is currently in use by another application. Please ensure that no other applications are using SPI.",
dis[0].Id);
return;
}
}
catch (Exception e)
{
Debug.WriteLine("Exception: " + e.Message + "\n" + e.StackTrace);
throw;
}
Now we will fill in the ReadADC method to actually read a value from the MCP3008 chip.
public int ReadADC(byte whichChannel)
{
byte command = whichChannel;
command |= MCP3008_SingleEnded;
command <<= 4;
byte[] commandBuf = new byte[] { 0x01, command, 0x00 };
byte[] readBuf = new byte[] { 0x00, 0x00, 0x00 };
mcp3008.TransferFullDuplex(commandBuf, readBuf);
int sample = readBuf[2] + ((readBuf[1] & 0x03) << 8);
int s2 = sample & 0x3FF;
Debug.Assert(sample == s2);
return sample;
} And finally add a helper method which will be used to convert the returned ADC value (in units) into a voltage.
public float ADCToVoltage(int adc)
{
return (float)adc * ReferenceVoltage / (float)Max;
}
Calibration
Run the code and set the breadboard in a normally lit area.
Look at the output window for the voltages being read by the ADC chip from the two potentiometers and the photo cell.
The first number is the value being read from the low adjustment pot the second is the high adjustment pot and the third is the value currently being read at the photo cell.
MainPage::timerCallback
Read values 211, 324, 179
Voltages 1.031281, 1.583578, 0.8748778 Turn the low boundary potentiometer, watching the value of the first number change. Adjust the pot until the voltage is a bit (at lease .2 volts) lower than the value of the third number.
Now turn the high boundary pot, watching the value of the second number. You want this to be a bit (once again at least .2 volts) higher than the value of the third number.
This has now configured a boundary zone where the value is "just right".
Operation
With the pots set this way if you shade the photocell with your hand the output should say "I need a light" and if you have connected the optional headphone / speaker you should hear the Pi2 speech.
Removing your shade will have it change to "Ah, just right" (and speech).
Shining a light on the sensor will change to "I need to wear shades" (with speech again).
MainPage::timerCallback
Read values 159, 324, 181
Voltages 0.7771261, 1.583578, 0.884653
MainPage::TextToSpeech Ah, just right
MainPage::timerCallback
Read values 159, 324, 149
Voltages 0.7771261, 1.583578, 0.7282503
MainPage::TextToSpeech I need a light
MainPage::timerCallback
Read values 159, 324, 372
Voltages 0.7771261, 1.583578, 1.818182
MainPage::TextToSpeech I need to wear shades
References
You can find out more about the Windows SpeechSynthesis API's at:
Information on the MCP3008 ADC chip can be found at:
http://www.microchip.com/wwwproducts/Devices.aspx?dDocName=en010530
Usage of the SPI interface:
https://msdn.microsoft.com/en-us/library/windows/apps/windows.devices.spi.aspx
Check out the next lesson here.






{kind=link}
Comments
Please log in or sign up to comment.