



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
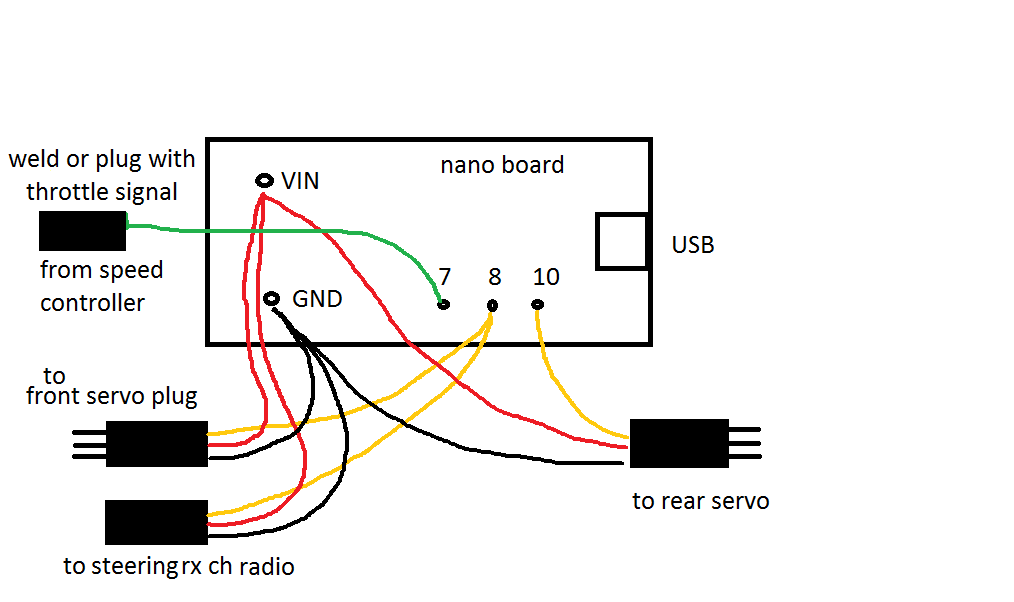
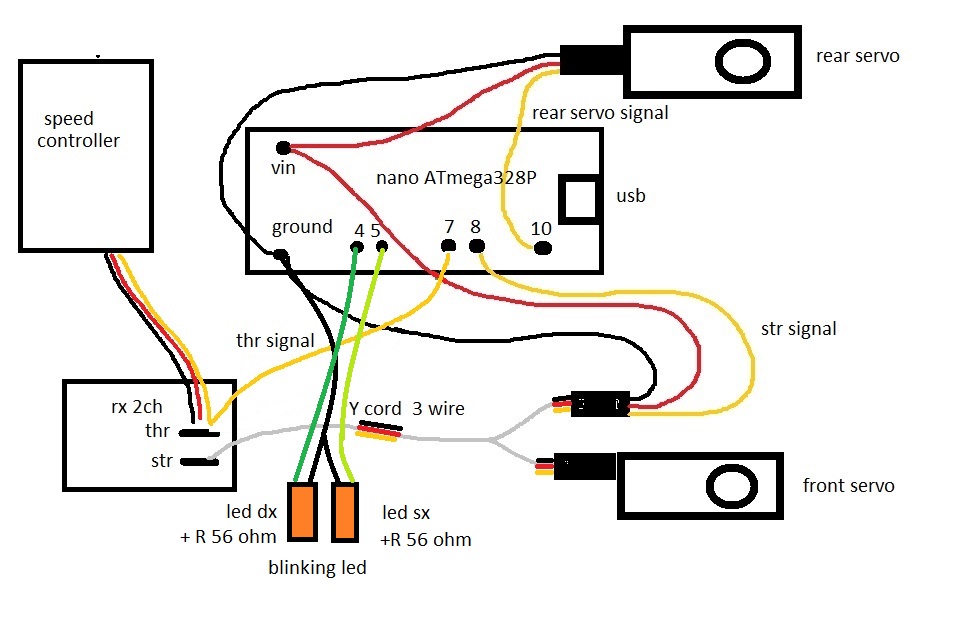
This simple controller allow to setup rear servo on rc models with 4 steering wheels with only a cheap 2ch radio.
you can decide how fast throttle the 4 steering wheels will start to limit themselves and how wide the curve radius should be.
you can also decide to switch off the 4ws at maximum speed and have them at full width only at low speed and in reverse throttle.
this avoids tipping over at full throttle and having a great 4ws steering at low speed and reverse..
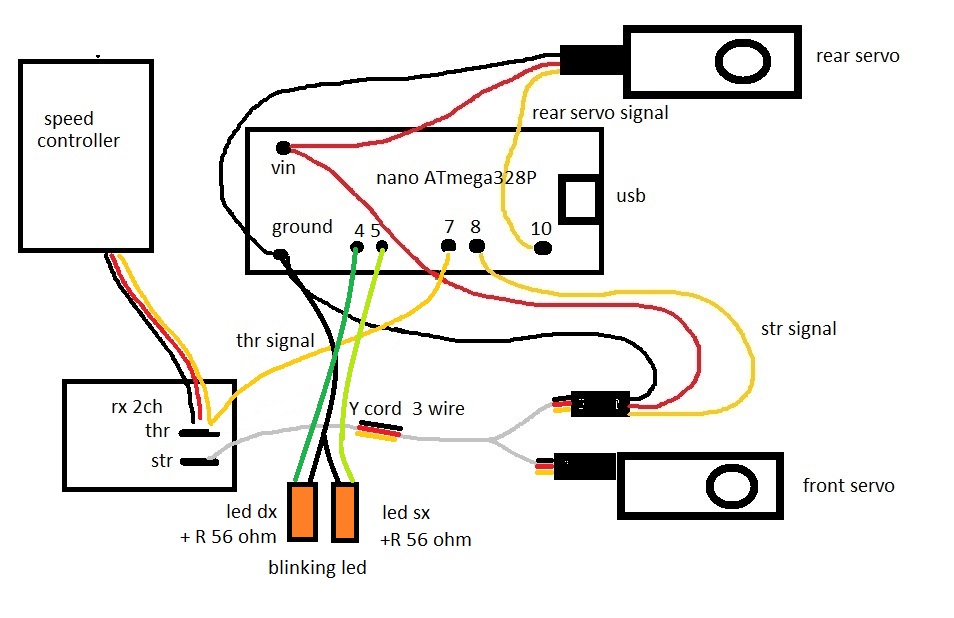
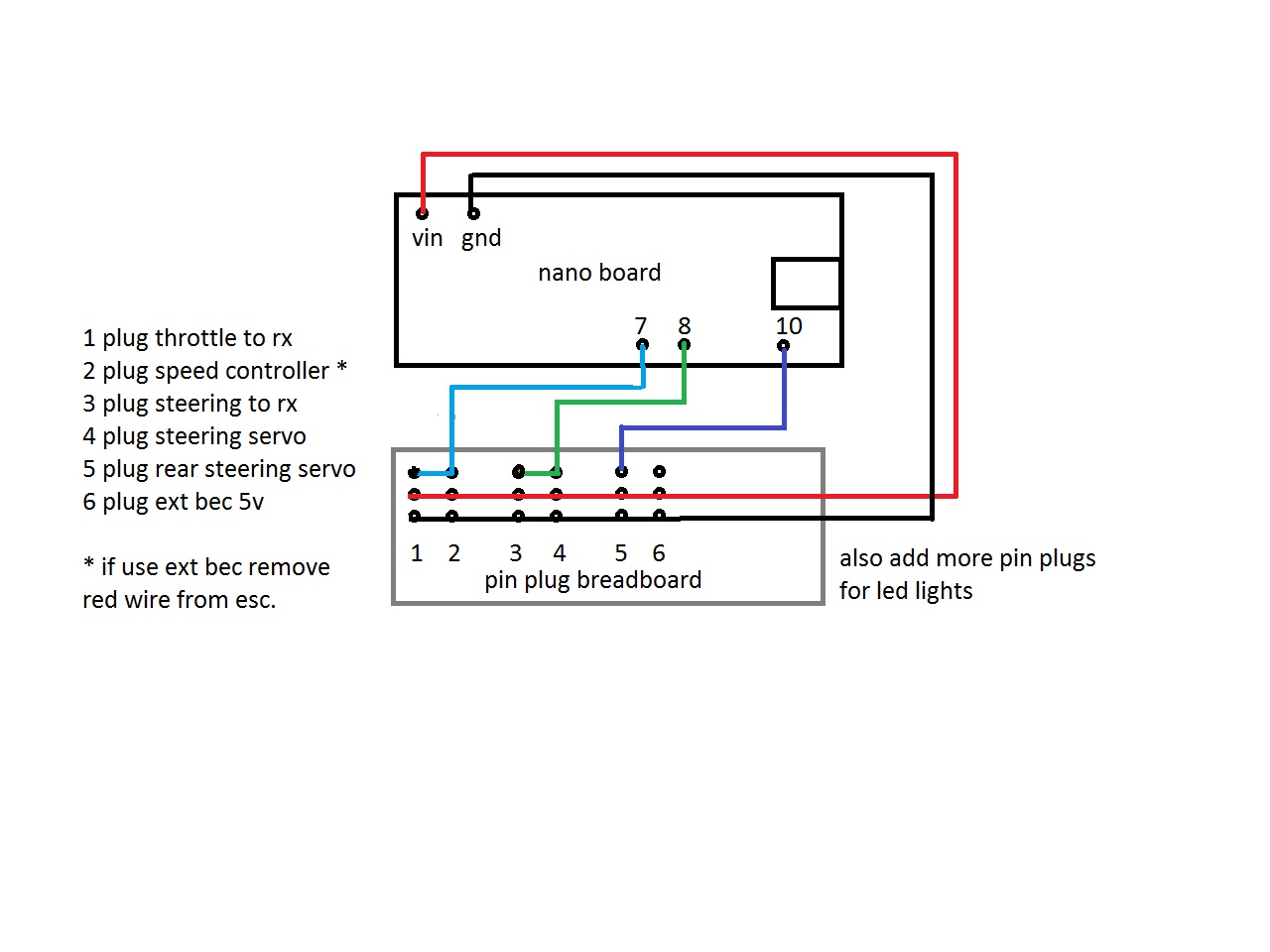
I also added blinking LEDs to indicate the steering direction.
setup is not too difficult and most of the instructions are written inside the code.
there are parameters to be defined which must be read with the serial monitor to know the right values of the radio control input signals. I wrote how to do it inside the code notes.
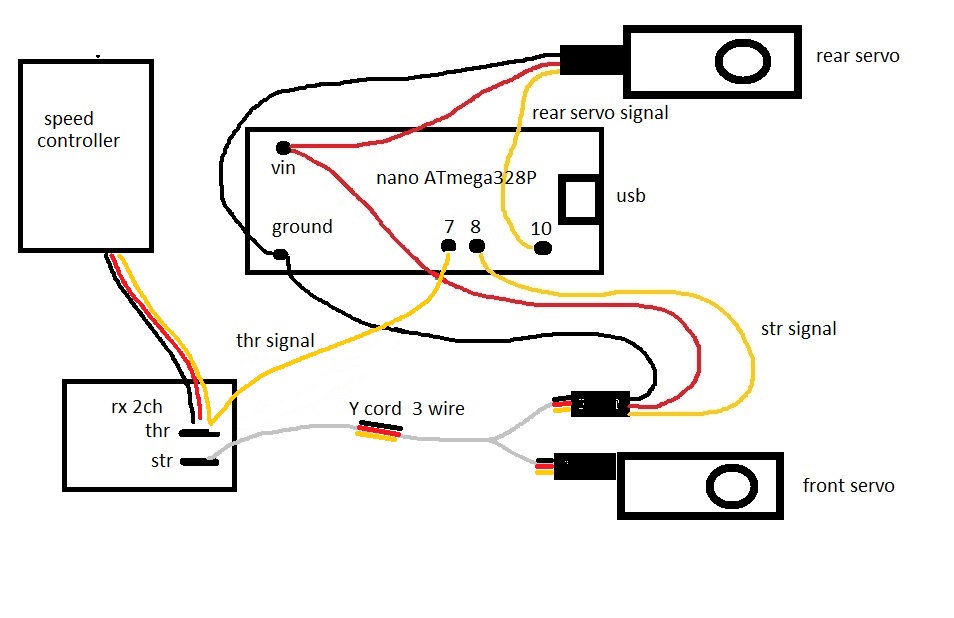
to build the controller you need 3-wire for servos, male and female plugs. it may be convenient to use a pair of Y-wires to pick up the throttle and steering signals without cutting esc or servo wires.
the setup becomes easy once you understand the configuration of your radio, I wrote what to do if the trottle or the steering is in reverse position.
this controller works very well, I mounted it on all of my trucks.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.