THE STORY OF SD-CARD
Our project is about a device that maintains social distancing.
The Beginning for innovation
Once the schools and offices reopen it will increase the risk of getting COVID-19. The only way we can decrease this risk is by maintaining social distancing. We started brainstorming on solutions through which we can make a device that not only maintains social distancing but is portable at the same time. Due to lockdown, we were limited with the resources available with us and hence we had to build something easily available. We started off something that can be easily implemented with less use of hands. We researched a lot and studied different kinds of sensors that can calculate the distance between 2 or more bodies. We studied from different sensor guide books and watched videos on YouTube from the channel of Arduino.
HOW THE-CARD WORKS
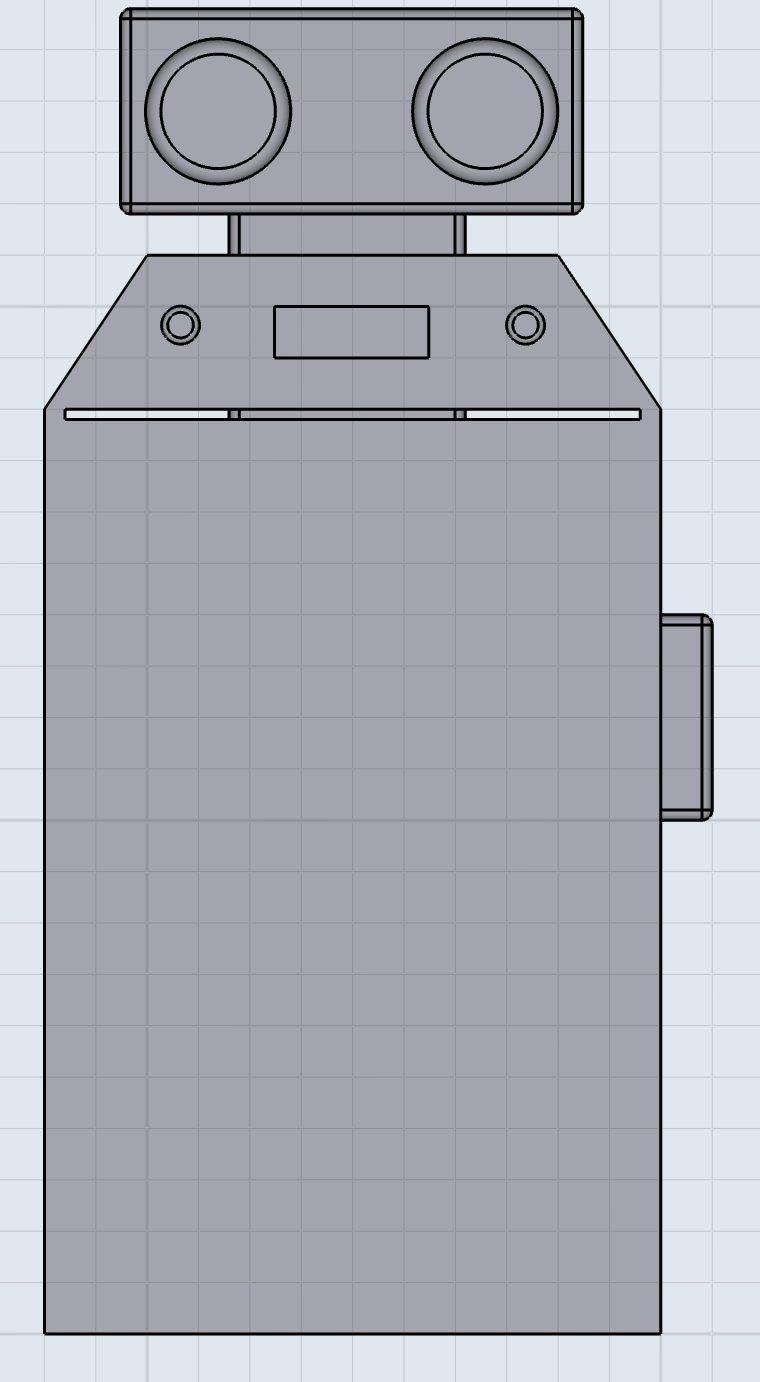
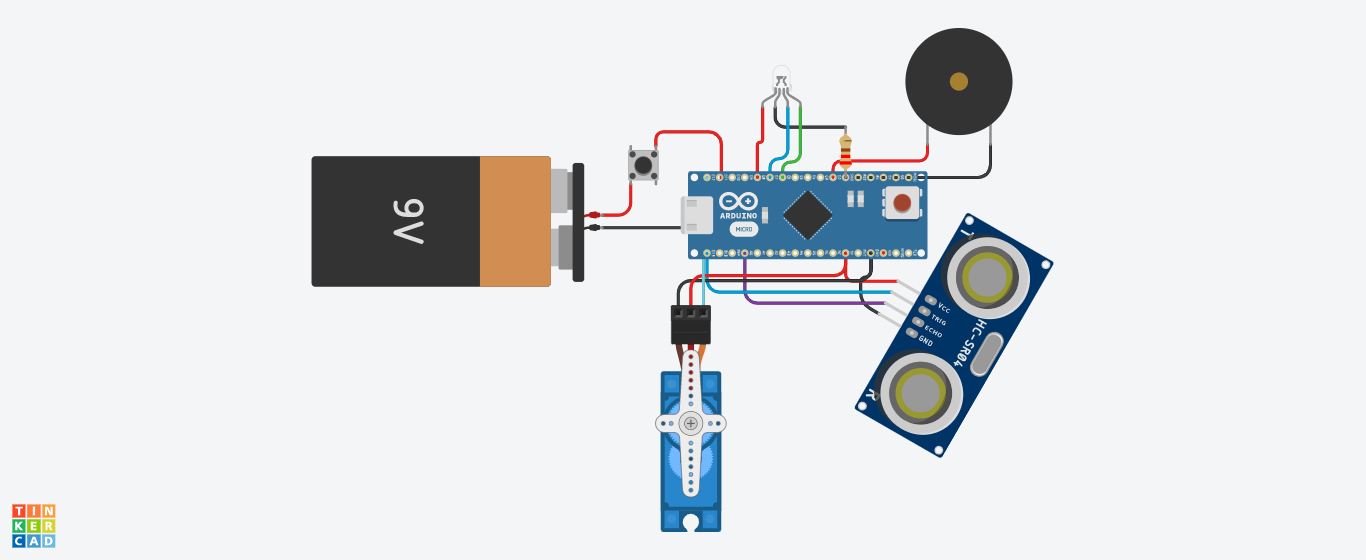
After a week of research, brainstorming and studying we ended up making, the SD-CARD (social distancing card). The SD-CARD consists of an Arduino Nano which is connected with a buzzer, an ultrasonic sensor and 2 LEDs. The ultrasonic sensor calculates the distance between the person wearing it and people near him/her. If the person is not maintaining social distancing i.e. if the person is less than 6 feet apart then the buzzer will start buzzing and alert the person. There are two LEDs red and green. Red LED turns on when social distancing isn't maintained and greed LED turns on when the distance is maintained. The entire device is powered by a 9V battery connected with a slide-switch too
PROBLEM AND HOW WE FIXED ITIn our prototype, the ultrasonic sensor was always on and so was the LED. The Arduino Nano was directly connected to a battery which gave it a constant supply because of which it was always.
We couldn't keep the SD-CARD always on so we decided to add a slide-switch. Like this, if you want to turn your SD-CARD off you can do so just by using the switch.
HOW WE CREATED OUR CIRCUIT
We used Autodesk Tinkercad to make our circuit and check our code. After testing our circuit on Tinkercad it was time to perform it in real life. We used ARDUINO IDE software to upload the code into the Arduino Nano.
Visit our website: https://pramitranjan1106.wixsite.com/sd-card














{kind=link}
{kind=link}



Comments