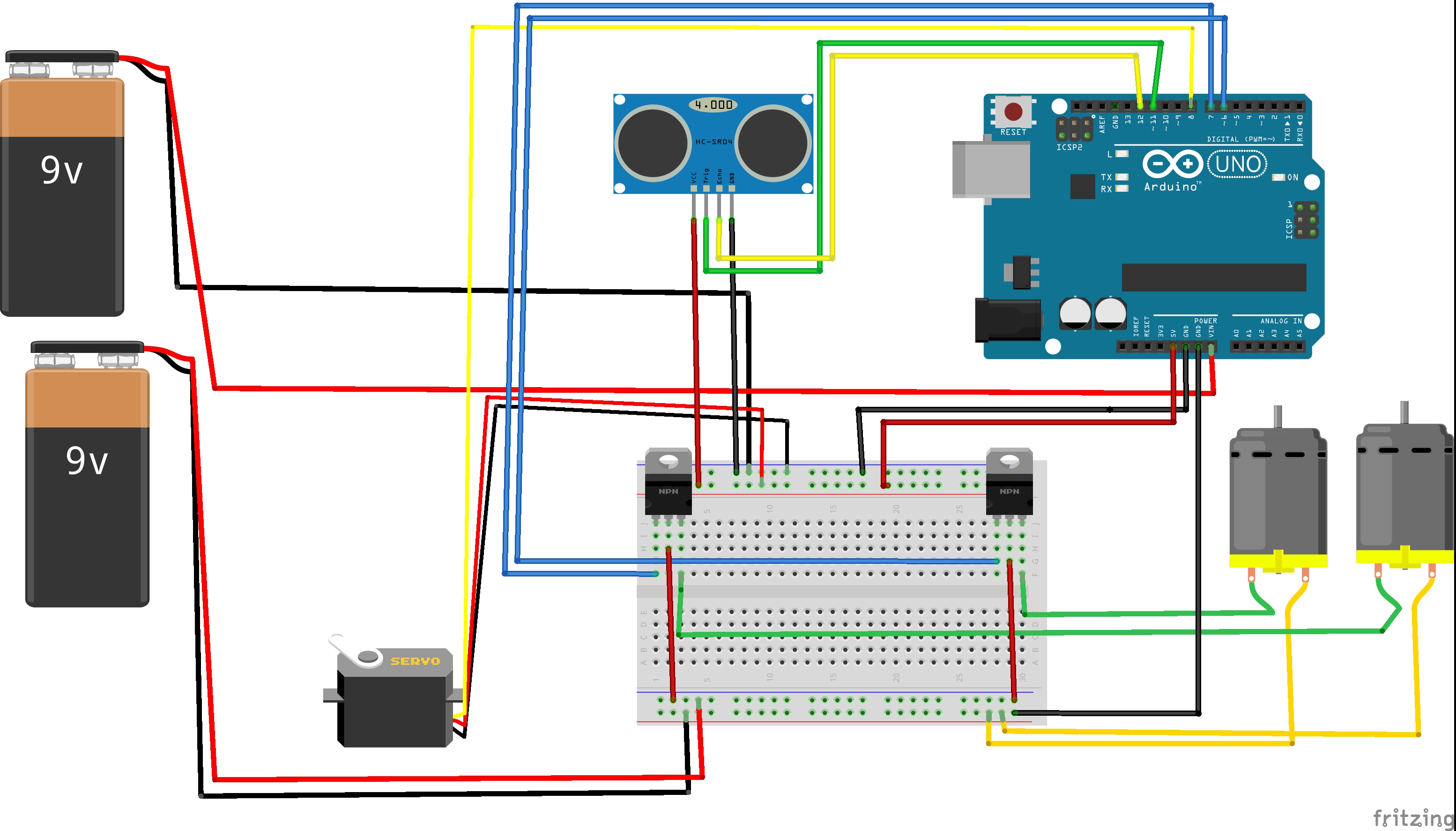
/*pin config
d7 - MOsfet left motor
d6 - Mosfet right motor
d12 - Ultrasonic sensor input
d11 - Ultrasonic sensor output
d10 - Servo
*/
int distancel;
int distancer;
long duration;
int distance;
int defaultDis;
int disturn;
#include<Servo.h>
Servo eye;
void setup() {
Serial.begin(9600);
eye.attach(10);
pinMode(7, OUTPUT);
pinMode(6, OUTPUT);
pinMode(11, OUTPUT);
pinMode(12, INPUT);
eye.write(90);
}
void loop() {
looks();
if (distance < 500) {
Serial.println(distance);
if (distance < 25) {
stopp();
delay(500);
distancel = lookl();
delay(500);
distancer = lookr();
delay(500);
if (distancel > distancer) {
tLeft();
}
else {
tRight();
}
}
else{
str();
}
}
}
int lookl() {
eye.write(160);
delay(1000);
ping();
eye.write(90);
return distance;
}
int lookr() {
eye.write(20);
delay(1000);
ping();
eye.write(90);
return distance;
}
int looks() {
eye.write(90);
ping();
return distance;
}
int ping() {
digitalWrite(11, LOW);
delayMicroseconds(2);
// Sets the 8 HIGH (ACTIVE) for 10 microseconds
digitalWrite(11, HIGH);
delayMicroseconds(10);
digitalWrite(11, LOW);
// Reads the 9, returns the sound wave travel time in microseconds
duration = pulseIn(12, HIGH);
// Calculating the distance
distance = duration * 0.034 / 2;
return distance;
}
void tLeft() {
digitalWrite(7, HIGH);
digitalWrite(6, LOW);
delay(500);
digitalWrite(7, HIGH);
digitalWrite(6, HIGH);
}
void tRight() {
digitalWrite(6, HIGH);
digitalWrite(7, LOW);
delay(500);
digitalWrite(7, HIGH);
digitalWrite(6, HIGH);
}
void str() {
digitalWrite(7, HIGH);
digitalWrite(6, HIGH);
}
void stopp() {
digitalWrite(7, LOW);
digitalWrite(6, LOW);
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)














{kind=link}
Comments
Please log in or sign up to comment.