



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
 |
| |||||
 |
| |||||
_4YUDWziWQ8.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| |||||
We are a 5 engineering students’ team from Polytech Sorbonne, during our studies in 2020 we have a project of an embedded system for monitoring beehives. This project is dedicated to helping beekeepers to analyse the beehive with sensors of internal and external temperatures, humidity; wind direction and speed; frequency of bees’ voice and weight etc.
We choose to design an autonomous self-charging product with the solar panel. This product sends data to the Ubidots via an antenna that we can analyse the beehive’s environment.
Detailed featuresThe monitoring consists in managing:
·Internal temperature/ humidity
·external temperature/ humidity
·Weight
·Wind direction/speed
·Frequency of voice
Prerequisites
Have knowledge in
·Microcontroller programming (Language C++)
·How to read a datasheet and extract the most important data
·I2C, UART Protocols
How to send data using Sigfox:
·AT Command
·How many messages can be sent per day?
Project info
·Status: Completed without frequency
·Difficulty: Intermediate (prerequisites in computer sciences)
·Estimated time: 3 months
1. Collect all the materials that we need and find the libraries of all the sensors.
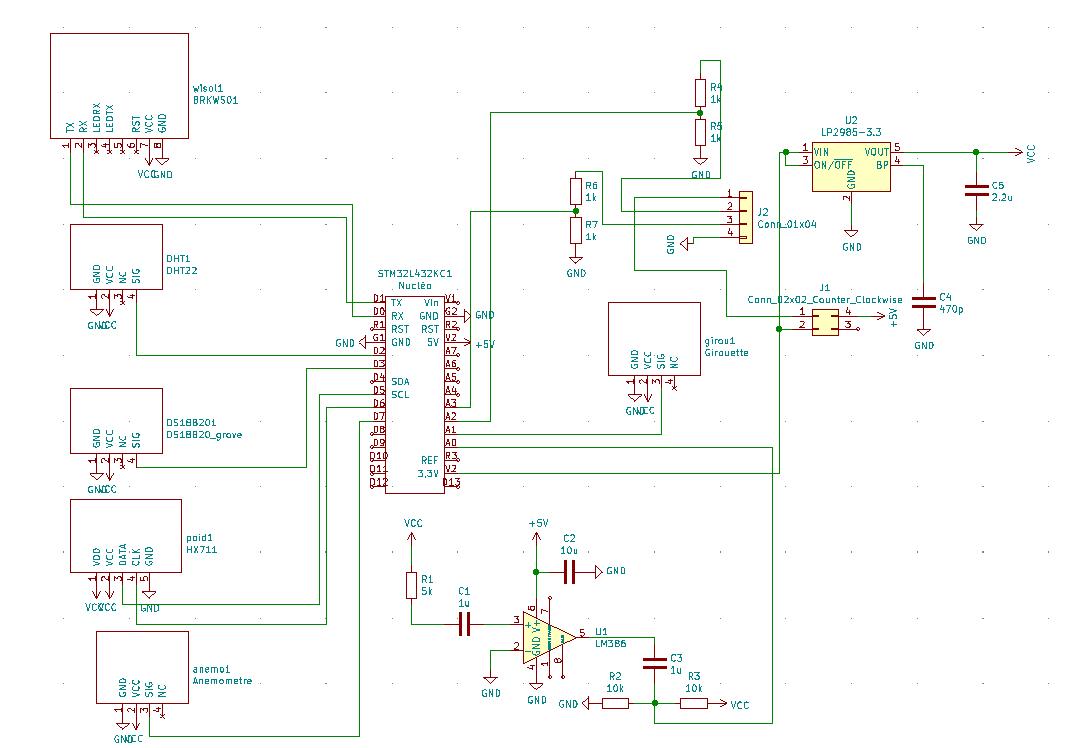
2. Making a map according to the pins of all the sensors.
3. Make a Labdec prototype with all the sensors and programming code.
4. Configure sigfox backend callbacks and IoT cloud Ubidots for receiving datas.
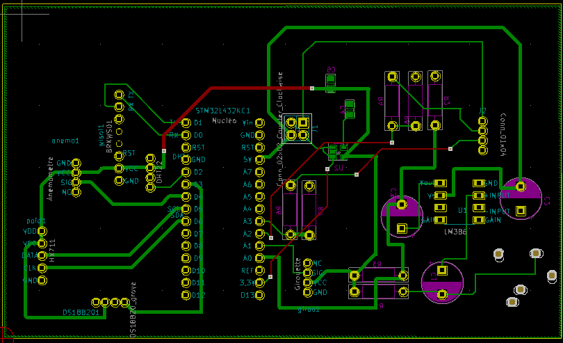
5. Design the schematic and PCB files.
6. Assembling the final prototype.
Our code is based on C++, we are using the libraries found in Mbed for DS18B20, DHT22, HX711 and anemometer.
We create a file “main.cpp” for all the sensors and Sigfox wisol.
The code is in the attachment.
Demonstration of the resultHere is our dashboard for gathering all datas.
Poster
Our team meber creates also a poster for our project.
Feedback
Because of the epidemic, we had confinement. It’s quite a lot of difficulties that we should face, but we are enjoying the project and we have made progress within the project.







_Ujn5WoVOOu.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.