


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
In this blog post, we'll walk you through creating a generic Modbus SDK for Arduino that can be used with any type of sensors. We'll cover the basics of Modbus communication, the benefits of modular design, and provide a step-by-step guide to implementing the SDK. This SDK will be flexible enough to handle various sensor data and can be easily integrated into your projects.
What is Modbus?Modbus is a communication protocol developed by Modicon (now Schneider Electric) in 1979 for use with its programmable logic controllers (PLCs). It has become a de facto standard communication protocol in the industry and is now the most commonly available means of connecting industrial electronic devices.
Modbus Protocol BasicsModbus devices communicate using a master-slave or client-server architecture. The protocol typically operates over serial lines (RS232, RS485), Ethernet (Modbus TCP/IP), and other communication media.
Modbus RTU (Remote Terminal Unit):
- Used over serial lines such as RS485.
- Binary representation of data for communication.
- Simple and compact frame format.
Modbus TCP/IP:
- Used over Ethernet networks.
- Encapsulates Modbus RTU frames within TCP/IP packets.
- Allows for high-speed communication and network flexibility.
Each Modbus frame consists of the following:
- Address Field: Identifies the slave device (1 byte).
- Function Code: Specifies the action to be performed (1 byte).
- Data Field: Contains the data to be sent or received (variable length).
- CRC (Cyclic Redundancy Check): Ensures data integrity (2 bytes).
Function codes are used to specify the type of action required by the slave. Some commonly used function codes include:
- 0x01: Read Coils
- 0x02: Read Discrete Inputs
- 0x03: Read Holding Registers
- 0x04: Read Input Registers
- 0x05: Write Single Coil
- 0x06: Write Single Register
- 0x0F: Write Multiple Coils
- 0x10: Write Multiple Registers
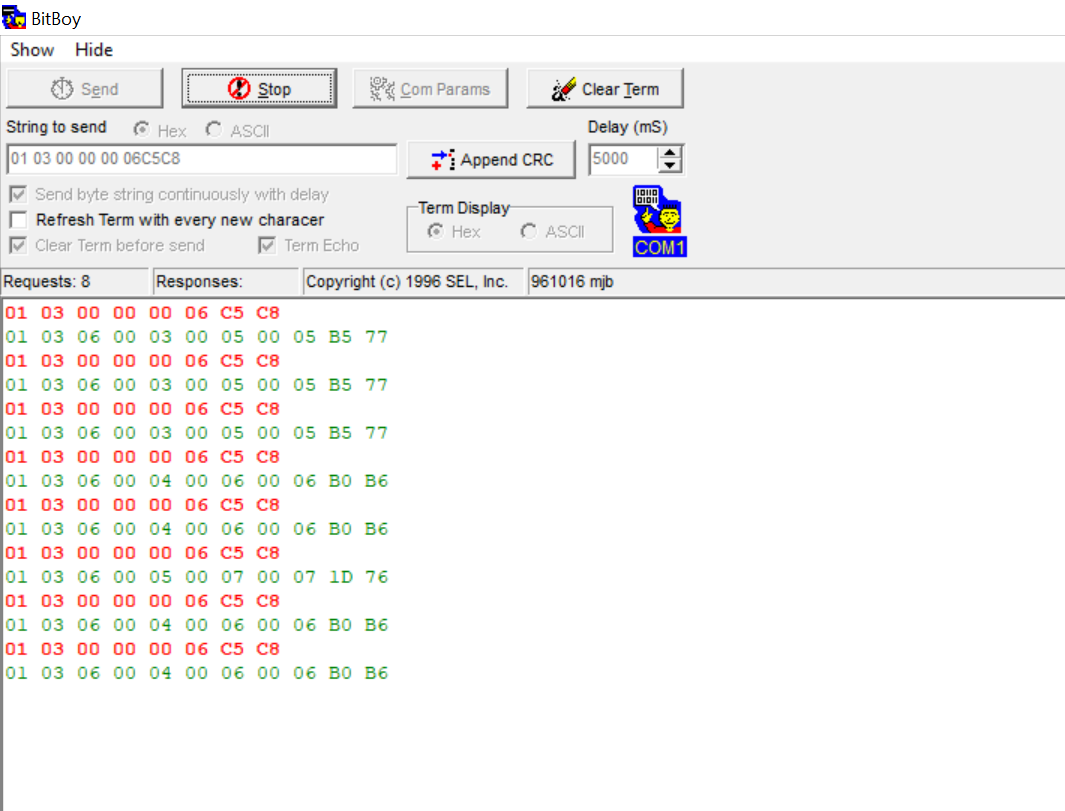
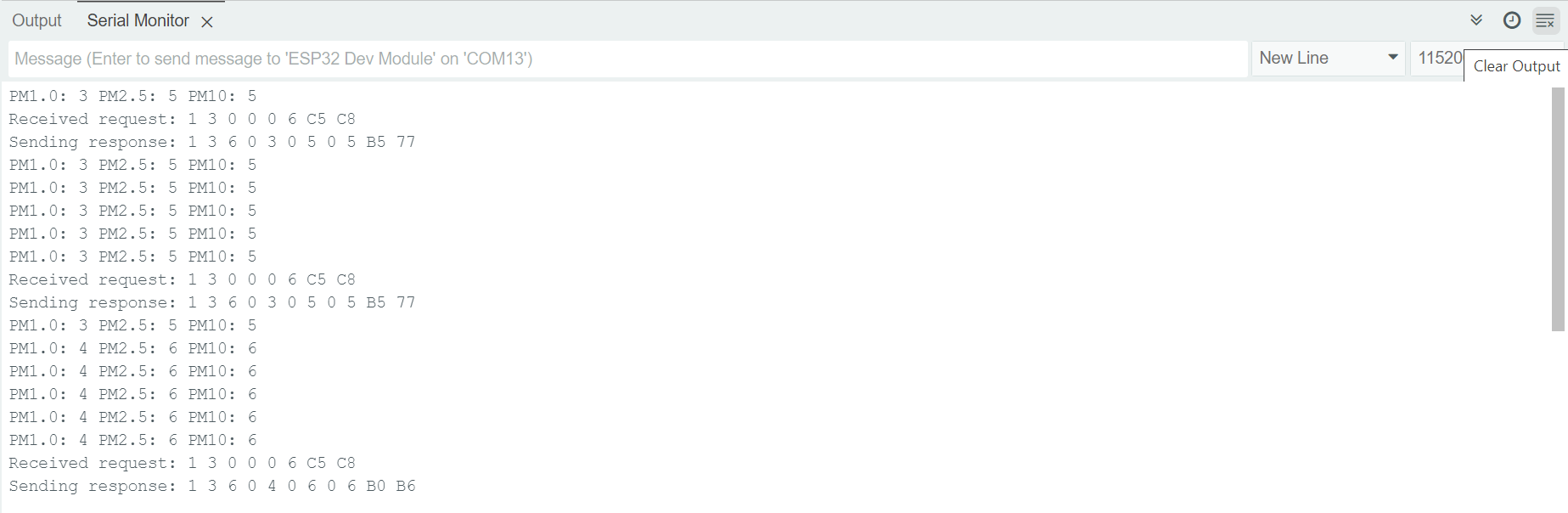
In our SDK example, we will use function code 0x03 to read holding registers, which is commonly used to read the current state of sensors.
Creating a generic Modbus SDK allows developers to easily integrate different types of sensors into their projects without rewriting the Modbus communication code for each sensor. This saves time and ensures that the code is modular, maintainable, and reusable.
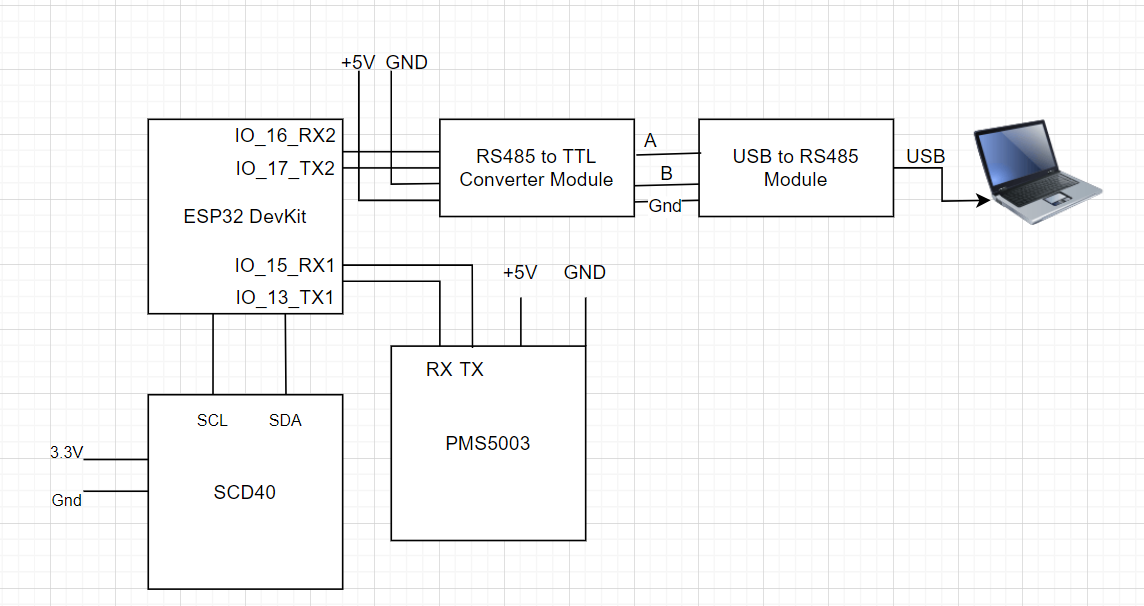
Components Used- Arduino Board (e.g., ESP32)
- PMS5003 Sensor (Particulate Matter Sensor)
- SCD40 Sensor (CO2, Temperature, and Humidity Sensor)
- RS485 Module
Ensure you have the Arduino IDE installed and set up for your specific board (e.g., ESP32). Install the necessary libraries for your sensors:
#include <Wire.h>
#include "SensirionI2CScd4x.h"We'll start by defining the ModbusSlave class in a header file and implementing the methods in a source file.
In this tutorial, we created a flexible Modbus SDK for Arduino that can handle various sensor data. This SDK is modular and reusable, allowing developers to integrate different types of sensors into their projects with ease. The complete source code is available for download, and you can adapt it to suit your specific requirements.




{kind=link}
{kind=link}
{kind=link}
Comments