Ladies and gentlemen, investors and enthusiasts, let me take you on a journey—a journey fueled by a passion for biophilic design, a craving for fresh produce, and a deep-seated commitment to conservation. Welcome to the world of the Smart Jalapeno, where innovation meets sustainability in the heart of your apartment.
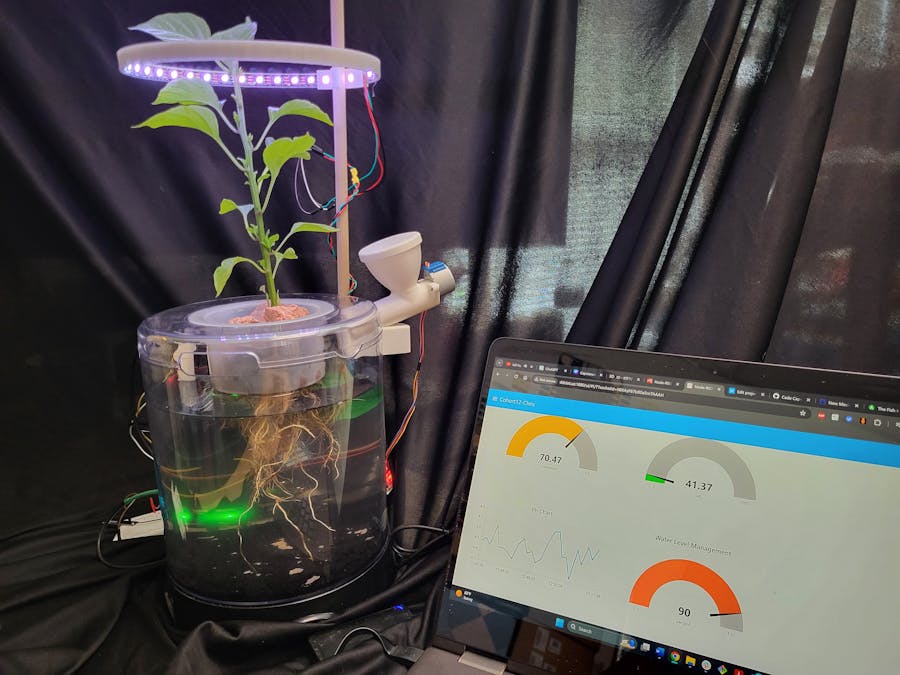
From the outset, my vision was clear: to create a biophilic oasis that seamlessly integrates nature into urban living spaces. But this wasn't just about aesthetics; it was about harnessing the power of nature to address pressing biological and environmental challenges. Enter aquaponics—the perfect marriage of aquaculture and hydroponics—where fish and plants thrive together in a symbiotic ecosystem.
Coding became my language, my tool for bringing this vision to life. While the manufacturing process was fairly straightforward, the real magic happened in the design phase. I sought to leverage nature's wisdom to overcome biological issues and engineer improvements that would ensure the success of both plants and fish within the Smart Jalapeno.
But this journey didn't start in a classroom—it started with a desire to make a difference. I've spent years absorbing knowledge, honing my skills, and refining my vision to create the best version of the Smart Jalapeno—a version that not only meets the needs of individuals but also contributes to a more sustainable and resilient society.
Now, let me show you what the Smart Jalapeno can do. With its innovative aquaponic food production system, it offers a multitude of benefits:
- Sustainable and intensive food production.
- Two agricultural products—fish and vegetables—from one nitrogen source.
- Extremely water-efficient, making it ideal for apartment living.
- Soil-less and chemical-free, ensuring clean and organic produce.
- Higher yields and quality production compared to traditional farming methods.
- Suitable for non-arable land, such as deserts or degraded soil.
- Labor-saving daily tasks, inclusive of all genders and ages.
- Economical production for both household consumption and commercial ventures.
But we're not stopping there. The Smart Jalapeno is just the beginning. We're already exploring expansions of ideas, including solar charging for energy efficiency, scalability for larger operations, and improved nutrient and water delivery systems for optimal plant and fish health.
So, investors, join me in this journey towards a more sustainable future. Together, we can revolutionize urban agriculture, one Smart Jalapeno at a time. Thank you.


_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)















Comments
Please log in or sign up to comment.