






This unit plus App gives a complete DCC controller with features that beat more expensive systems.
Value for money, reliable, simple to use, customise the system to match your roster of locos.
Includes F1 to F32 function buttons compatible with latest sound decoders
Add your own loco names and function titles.
- Install App on an Android device (phone or tablet)
For beginners, install the basic free App 'LocoMotive Cab' to get you started
- Plug in a DC 15 volt power source
- Store your roster of up to 100 locomotives
- Control up to 4 trains at a time with many others running in the background
What is different about this system ?
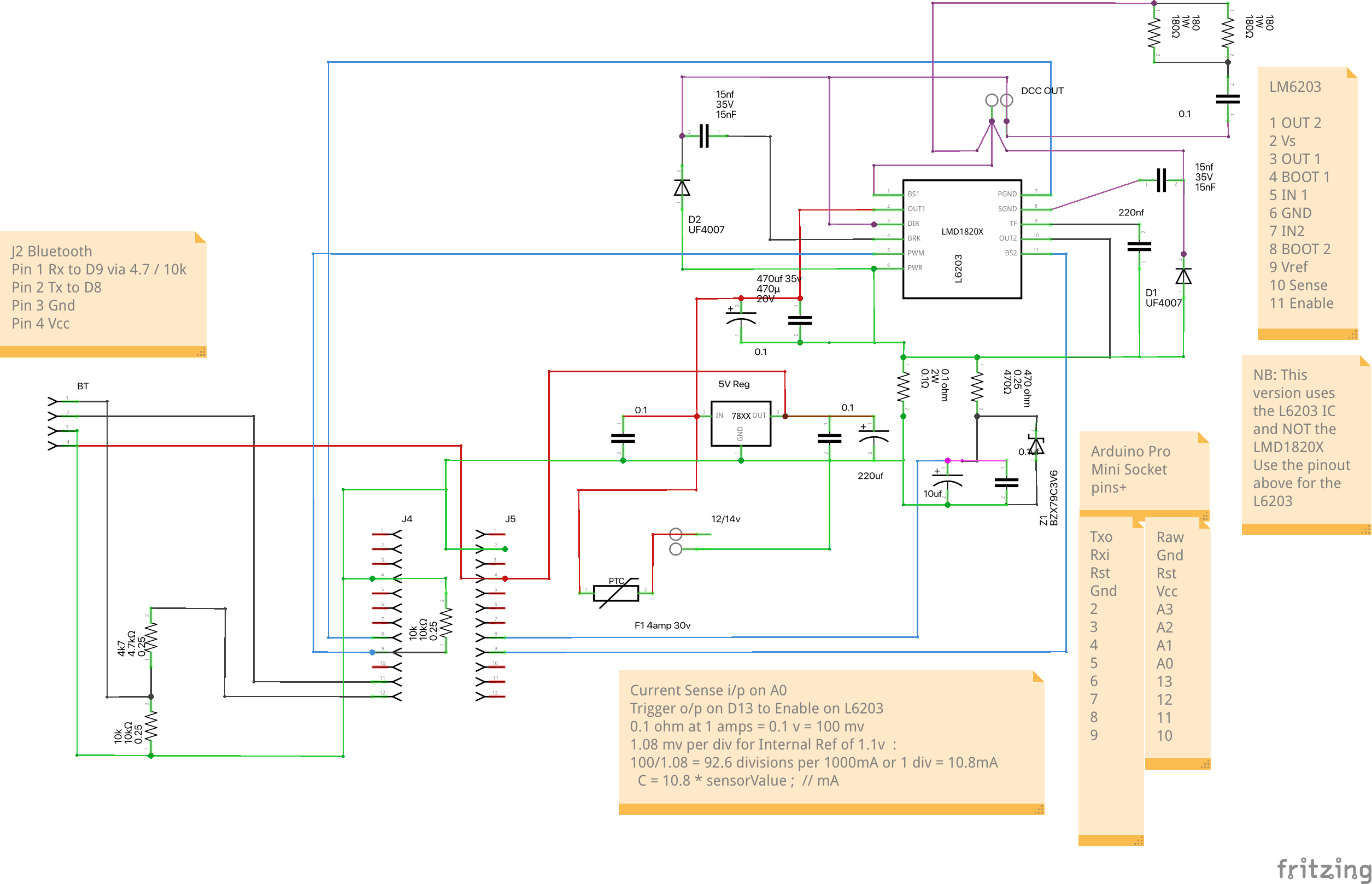
A very simple electronic circuit provides the DCC signal and power for the track, however the App does the real work ! The computer on your phone is utilised to the full by constructing the codes required to form each packet of instructions, thus simplifying the job of the controller !
You have 3 Apps to choose from:
Basic free App
“LocoMotive Cab” (copy of instructions for this free App can be downloaded under 'product documents' below)
Standard "Locomotive DCC" App with short addressing and CV read write
“LocoMotive DCC”
New "Locomotive DCC 2" App with 4 digit addressing, CV read/write, program on the main(PoM) and making consists
“Locomotive DCC 2”
The easiest ever, NMRA compliant DCC Command station !!
Look at the list of features below !!
Suitable for NMRA compatible decoders e.g. Bachmann, Lenz, Atlas, Hornby, etc
Includes instructions and a free 'LocoMotive Cab' Android App.
This revolutionary system compiles the operating DCC packets within the App which are sent to the Microcontroller interface to combine with the DCC clock signals.
Full App features include:
- Roster list contains up to 100 locos with short or long address
- Ideal for small to medium size layouts
- 2.5 Amps load drives 12 or more of OO/HO locomotives (more on Z or N gauge)
- Short circuit protected
- Automatic overload cut-out
- Lights and direction
- Functions 1 to 32
- Turnout / points / accessories 255 pairs of outputs
- Custom naming of your locos
- Read / write CV's 1 to 1024
- Add your own accessory addresses
- Editable titles, visibility and momentary options on 28 function buttons
- 4 on-screen speed bars for control of 4 locos at a time
- Add max speed for each loco
- Long address (1-9999) and short address (1-127)
- Program on the main
- Form a consist (double head your locos)
- Powered by Arduino
NB: App works on Android 8 upwards.
App is not compatible with Apple iOS
Power supply: voltage of 12 to 18 volts DC
Ensure correct polarity of output plug before connecting.
Connect a 15v 2 amp power supply with a 2.1mm/2.5mm x 5.5 mm plug, for example
search for eBay item # 401871382681
or
Connect a 15v 3 amp power supply similar to :
PowerPax item SW4323B with a 2.1mm/2.5mm x 5.5 mm plug, available from cpc.farnell.com
or
Connect a Multibao 15v 3A adapter with a 2.1mm/2.5mm x 5.5 mm plug,
or
Connect a Photonic Universe 16v 3A adapter with a 2.1mm/2.5mm x 5.5 mm plug,
or
Search for "15V 3A Power Supply AC/DC Adapter 100V-240V 50/60hz DC 15 Volt 3 Amp 45 Watt"
For N or Z gauge use a 12v 3 amp power adapter with a 2.1mm/2.5mm x 5.5 mm plug
Do NOT use a AC nor a DC train controller as these do not provide a true DC voltage.
For users over 14 years old.
For indoor use only.
// v4 Jan 2025 CV1 write sequence extended
// v3 Aug 2 2023 Cs = Ccv +30 for read and write : was + 60 for write and +100 for read
// v2 30 Oct 2022 changed version to isolate text 'IBT' for App max current
// 11 Oct 2022
#include <AltSoftSerial.h>
AltSoftSerial bluetooth(8,9); // RX TX
String Version = "ver: hcv ccv locomotive_dcc_L6203 IBT 2.5amp_v4";
int C;
float Cinst;
long bt_fail;
int inst_value;
int sensorValue;
String inString;
int preamable_type = 0;
int Address;
int MsbAddr;
int LsbAddr;
float CV_VAL;
float cv_val;
float cv_val0;
float cv_val1;
float cv_val2;
float cv_val3;
float cv_val4;
float cv_val5;
float cv_val6;
float cv_val7;
int test_num;
int cv_write_val;
int Cs;
int Ccv;
boolean cv_logic;
boolean ok;
boolean power_off =false;
boolean e_stop = false;
int num;
int a[8];
int ops_cv_num1;
int ops_cv_num2;
int ops_cv_val;
// use digital pins 6 and 5 for DCC out
//Timer frequency is 2MHz for ( /8 prescale from 16MHz )
#define TIMER_SHORT 0x8D // 58usec pulse length
#define TIMER_LONG 0x1B // 116usec pulse length
unsigned char last_timer=TIMER_SHORT; // store last timer value
unsigned char flag=0; // used for short or long pulse
unsigned char every_second_isr = 0; // pulse up or down
// definitions for state machine
#define PREAMBLE 0
#define SEPERATOR 1
#define SENDBYTE 2
unsigned char state= PREAMBLE;
unsigned char preamble_count = 16;
unsigned char index = 0; // **
unsigned char outbyte = 0;
unsigned char cbit = 0x80;
// variables
unsigned char xdata = 0, data = 0, data_f = 0,data_f1 = 0,data_f2 = 0;
int locoAdr = 9; // this is the default address of the loco
int data_reg = 0;
int page_reg = 1;
// buffer for command
struct Message {
unsigned char data[7];
unsigned char len;
} ;
#define MAXMSG 3
// for the time being, use only 3 messages - the idle msg, the loco Speed msg, function msg
struct Message msg[MAXMSG] = {
{ { 0xFF,0xFF, 0xFF, 0, 0, 0, 0}, 3}, // idle msg
{ { locoAdr, 0x3f, 0, 0x36, 0, 0, 0}, 6}, // locoMsg with 128 speed steps 0x3f
{ { 16, 0, 0, 0, 0, 0, 0}, 3} // ** added this message to handle preamble
// and idle message changes as required
}; // loco msg must be filled later with speed and XOR data byte
int msgIndex=0;
int byteIndex=0;
//Setup Timer2.
//Configures the 8-Bit Timer2 to generate an interrupt at the specified frequency.
//Returns the time load value which must be loaded into TCNT2 inside your ISR routine.
void SetupTimer2(){
//Timer2 Settings: Timer Prescaler /8, mode 0
//Timmer clock = 16MHz/8 = 2MHz period 0,5usec
TCCR2A = 0;
TCCR2B = 0<<CS22 | 1<<CS21 | 0<<CS20;
//Timer2 Overflow Interrupt Enable
TIMSK2 = 1<<TOIE2;
//load the timer for its first cycle
TCNT2=TIMER_SHORT;
}
//Timer2 overflow interrupt vector handler
ISR(TIMER2_OVF_vect) {
//Capture the current timer value TCTN2. This is how much error we have
//due to interrupt latency and the work in this function
//Reload the timer and correct for latency.
unsigned char latency;
// for every second interupt just toggle signal
if (every_second_isr) {
if (power_off == false) {PORTD = B01100000;PORTD = B00100000;// pin5 to IN1 pin6 to IN2 to avoid h-bridge shoot thro
}
if (power_off == true) {PORTD = B01100000; // for supply off
}
every_second_isr = 0;
// set timer to last value
latency=TCNT2;
TCNT2=latency+last_timer;
} else { // != every second interrupt, advance bit or state
if (power_off == false) {PORTD = B01100000;PORTD = B01000000;// pin5 to IN1 pin6 to IN2 to avoid h-bridge shoot thro
}
if (power_off == true) {PORTD = B01100000; // for supply off
}
every_second_isr = 1;
switch(state) {
case PREAMBLE:
flag=1; // short pulse
preamble_count--;
if (preamble_count == 0) { // advance to next state
state = SEPERATOR;
// get next message
msgIndex++;
if (msgIndex >= MAXMSG-1) { msgIndex = index;} // **
byteIndex = 0; //start msg with byte 0
}
break;
case SEPERATOR:
flag=0; // long pulse
// then advance to next state
state = SENDBYTE;
// goto next byte ...
cbit = 0x80; // send this bit next time first
outbyte = msg[msgIndex].data[byteIndex];
break;
case SENDBYTE:
if (outbyte & cbit) {
flag = 1; // send short pulse
} else {
flag = 0; // send long pulse
}
cbit = cbit >> 1;
if (cbit == 0) { // last bit sent, is there a next byte?
byteIndex++;
if (byteIndex >= msg[msgIndex].len) {
// this was already the XOR byte then advance to preamble
state = PREAMBLE;
preamble_count = msg[2].data[0]; // **
index = msg[2].data[1]; // **
} else {
// send separtor and advance to next byte
state = SEPERATOR ;
}
}
break;
}
if (flag) { // if data==1 then short pulse
latency=TCNT2;
TCNT2=latency+TIMER_SHORT;
last_timer=TIMER_SHORT;
} else { // long pulse
latency=TCNT2;
TCNT2=latency+TIMER_LONG;
last_timer=TIMER_LONG;
}
}
}
void setup(){
Serial.begin(115200);
analogReference(INTERNAL);
pinMode(13, OUTPUT);
digitalWrite(13, HIGH);
Ccv = 60;
bt_fail = 1;
e_stop = false;
bluetooth.begin(9600);
bluetooth.setTimeout(500);
delay(500); // wait for bluetooth module to start
Serial.println("Bluetooth Started");
bluetooth.println("Bluetooth Started");
bluetooth.println(Version);
DDRD = B01100000; // register D5 for digital pin 5, D6 for digital pin 6
//Start the timer
SetupTimer2();
power_off = true; // power off
int get_cv_val;
}
void current(){
int i;
int value = 0;
int numReadings = 5;
for (i = 0; i < numReadings; i++){
// Read sensor data.
value = value + analogRead(A0);
// 1ms pause adds more stability between reads.
delay(1);
}
sensorValue = value/numReadings;
// Convert the analog reading (which goes from 0 - 1023) to a voltage (0 - 1.1V) = 1.08mv per division
// 0.1 ohm resistor on current sense gives 200mv at 2 Amps or, 100mv per Amp
// 1.08 mv per div for Internal Ref of 1.1v : 100/1.08 = 92.6 divisions per 1000mA or 1 div = 10.8mA
C = 10.8 * sensorValue ; // mA
if(C >2500){ // 2.5 amps
Serial.println("Over Current");
power_off = true; // power off
if(bluetooth.available() == true);{
bluetooth.println("Short!");
}
delay(5);
if(bluetooth.available() == true);{
bluetooth.println("Short!");
}
}
}
void loop() {
if( power_off || e_stop){
Serial.println("Over Current here");
if(bluetooth.available() == true);{
inString = bluetooth.readStringUntil('\n');
Serial.println(inString);
}
if (inString.substring(0,1) == "C"){
digitalWrite(13, HIGH);
power_off = false;
e_stop = false;
bt_fail = 0;
bluetooth.println(Version);}
// reset after over current, logic control of DCC signal on,brake of
return;}
inst_value = analogRead(A0);
Cinst = (10.8 * inst_value) ; // mA
//Serial.println(Cinst);
//Serial.print("current inst = ");Serial.println((int)Cinst);
if(Cinst >2500){ // 2.5 amps
//Serial.println("Over Current");
digitalWrite(13, LOW); // output off
power_off = true;
if(bluetooth.available() == true);{
bluetooth.println("Short!");
}
delay(5);
if(bluetooth.available() == true);{
bluetooth.println("Short!");
}
}
if(bluetooth.available() == true);
{
inString = bluetooth.readStringUntil('\n');
Serial.println(inString);
}
if (inString.substring(0,1) == "F"){
bt_fail = 1;
stringFF(); }
// incoming DCC packet DCC_2
if (inString.substring(0,1) == "T"){
bt_fail = 1;
stringTT(); }
// incoming DCC packet DCC_2 ops mode
if (inString.substring(0,1) == "D"){
bt_fail = 1;
string(); }
// incoming DCC packet DCC
if (inString.substring(0,1) == "C"){
bt_fail = 1;
power_off = false; digitalWrite(13, HIGH);
bluetooth.println(Version);} //power on
// reset after over current, logic control of DCC signal on,brake off
if (inString.substring(0,1) == "S"){
bt_fail = 0;
get_Ccv();
bluetooth.println(Version);
}
// adjust CV sensitivity
if (inString.substring(0,1) == "G"){
bt_fail = 1;
current();
bluetooth.print(C);
bluetooth.println(" mA");
Serial.print(C);
bluetooth.println(" mA");
}
// request for load current value
if (inString.substring(0,1) == "X"){
bt_fail = 1;
}
// keep alive for CV Set App
if (inString.substring(0,1) == "A"){
digitalWrite(13, HIGH);
power_off = false;
bt_fail = 0;
get_cv_data();
cv1_prog();
digitalWrite(13, LOW);
}
// set CV1 address
if (inString.substring(0,3) == "get"){
digitalWrite(13, HIGH);
bt_fail = 0;
power_off = false;
cv_val = 0;
get_cv_num();
cv_read();
digitalWrite(13, LOW);
}
// CV read
if (inString.substring(0,3) == "add"){
digitalWrite(13, HIGH);
bt_fail = 0;
power_off = false;
cv_write_val = 3;
get_cv_new_val();
repeat_cv_write();
digitalWrite(13, LOW);
}
// CV write
if (inString.substring(0,1) == "V"){
for (int i = 0; i<=10; i++){
delay(20);
bluetooth.println("CV1 updated"); // added 3x message
};
Serial.println(Address);}
// cv1 write confirm
if (inString.substring(0,1) == "E"){
e_stop = true; // e stop
emergency_stop();
delay(20);
return;
}
// e-stop
//Serial.print("bt_fail = " );Serial.println(bt_fail);
if (inString == "" && bt_fail >= 1){
bt_fail = bt_fail + 1;
if (bt_fail >= 5){
power_off = true; // power off
Serial.println("Lost BT connection");
}
} // bt fail safe
inString = "";
}
void get_Ccv(){
Serial.println(inString);
String temp ="";
int x = inString.indexOf(",") + 1;
temp = inString.substring(x,8);
Serial.println(temp);
Ccv = temp.toInt();
Serial.print("Ccv: ");Serial.println(Ccv);
}
void get_cv_new_val(){
Serial.println(inString);
String cv_w ="";
int x = inString.indexOf("new,") + 4;
cv_w = inString.substring(x,x+3);
Serial.println(cv_w);
cv_write_val = cv_w.toInt();
Serial.print("cv_write_val: ");Serial.println(cv_write_val);
String addr ="";
int z = inString.indexOf("addr,") + 5;
addr = inString.substring(z,z+3);
Serial.println(addr);
Address = addr.toInt();
Serial.print("Address: ");Serial.println(Address);
Address = Address -1;
calc_address();
}
void get_cv_data(){
unsigned long z = inString.length();
int y = 0;
int count = 0;
String inChar;
String temp ="";
for (int i = 0; i<=z; i++){
inChar = inString.substring(i,i+1);
if (inChar == ",") {count++;}
if (inChar != "," && inChar != "A") {temp += inChar;}
if (inChar == ",") {Address = (temp.toInt());y = y +1;temp = "";}
}
amend_len3(msg[1]);
assemble_3_byteDD();
Serial.println(inString);
}
void stringTT(){ // incoming DCC packet DCC_2 ops mode
unsigned long z = inString.length();
int y = 0;
for (int i = 0; i<=6; i++){
a[i] = 0;
}
int count = 0;
String inChar;
String temp ="";
for (int i = 0; i<=z; i++){
inChar = inString.substring(i,i+1);
if (inChar == ",") {
count++;
}
if (inChar != "," && inChar != "T") {
temp += inChar;
}
if (inChar == ",") {
a[y] = (temp.toInt());
y = y +1;
temp = "";
}
}
a[3] = a[3] -1;
if (count == 5 && a[2] <=100){
Serial.println("tt");
//print_data();
ops_cv_num1 = a[3] % 256;
ops_cv_num2 = int(a[3] / 256);
ops_cv_val = a[4];
amend_len5(msg[1]);
assemble_5_byteTT();
//print_data();
}
if (count == 5 && a[2] >= 101){
Serial.println(inString);
//print_data();
a[5] = a[2] % 256;
a[2] = 192 + int(a[2] / 256);
ops_cv_num1 = a[3] % 256;
ops_cv_num2 = int(a[3] / 256);
ops_cv_val = a[4];
amend_len6(msg[1]);
assemble_6long_byteTT();
//print_data();
}
Serial.println(inString);
Serial.println(a[1]);
Serial.println(a[2]);
Serial.println(a[3]);
Serial.println(a[4]);
Serial.println(a[5]);
Serial.println(a[6]);
}
void stringFF(){ // incoming DCC packet DCC_2
unsigned long z = inString.length();
int y = 0;
for (int i = 0; i<=6; i++){
a[i] = 0;
}
int count = 0;
String inChar;
String temp ="";
for (int i = 0; i<=z; i++){
inChar = inString.substring(i,i+1);
if (inChar == ",") {
count++;
}
if (inChar != "," && inChar != "F") {
temp += inChar;
}
if (inChar == ",") {
a[y] = (temp.toInt());
y = y +1;
temp = "";
}
}
//Serial.println(count);
if (count == 3 ){
//Serial.println(inString);
//print_data();
amend_len3(msg[1]);
assemble_3_byteFF();
}
if (count == 4 && a[2] <=100){
//Serial.println(inString);
//print_data();
amend_len3(msg[1]);
assemble_3_byteFF();
}
if (count == 5 && a[2] <=100){
//Serial.println(inString);
//print_data();
amend_len4(msg[1]);
assemble_4_byteFF();
//print_data();
}
if (count == 4 && a[2] >100){
//Serial.println(inString);
//print_data();
a[5] = a[2] % 256;
a[2] = 192 + int(a[2] / 256);
amend_len4(msg[1]);
assemble_4long_byteFF();
}
if (count == 5 && a[2] >100){
//Serial.println(inString);
//print_data();
a[5] = a[2] % 256;
a[2] = 192 + int(a[2] / 256);
amend_len5(msg[1]);
assemble_5long_byteFF();
//print_data();
}
}
void string(){
unsigned long z = inString.length();
int y = 0;
for (int i = 0; i<=5; i++){
a[i] = 0;
}
int count = 0;
String inChar;
String temp ="";
for (int i = 0; i<=z; i++){
inChar = inString.substring(i,i+1);
if (inChar == ",") {
count++;
}
if (inChar != "," && inChar != "D") {
temp += inChar;
}
if (inChar == ",") {
a[y] = (temp.toInt());
y = y +1;
temp = "";
}
}
if (count == 3){
//Serial.println(inString);
//print_data();
amend_len3(msg[1]);
assemble_3_byteDD();
}
if (count == 4){
//Serial.println(inString);
//print_data();
amend_len4(msg[1]);
assemble_4_byteDD();
}
//Serial.println(inString);
//Serial.println(a[1]);
// Serial.println(a[2]);
//Serial.println(a[3]);
//Serial.println(a[4]);
//print_data();
}
void assemble_4_byteDD() {
noInterrupts();
msg[2].data[0] = 14; // 14 x '1's // **
msg[2].data[1] = 0; // **
msg[1].data[0] = a[1];
msg[1].data[1] = a[2];
msg[1].data[2] = a[3];
msg[1].data[3] = ((a[1] ^ a[2])^ a[3]);
interrupts();
}
void assemble_3_byteDD() {
noInterrupts();
msg[2].data[0] = 14; // 14 x '1's // **
msg[2].data[1] = 0; // **
msg[1].data[0] = a[1];
msg[1].data[1] = a[2];
msg[1].data[2] = (a[1] ^ a[2]);
interrupts();
}
void emergency_stop(){
amend_len3(msg[1]);
noInterrupts();
msg[2].data[0] = 14; // 14 x '1's
msg[2].data[1] = 0;
msg[1].data[0] = 0;
msg[1].data[1] = B01000001;
msg[1].data[2] = (msg[1].data[0] ^ msg[1].data[1]); // e stop
interrupts();
delay(5);
power_off = true;
}
void amend_len4 (struct Message & x)
{
x.len = 4;
//Serial.println(x.len);
}
void amend_len5 (struct Message & x)
{
x.len = 5;
//Serial.println(x.len);
}
void amend_len6 (struct Message & x)
{
x.len = 6;
//Serial.println(x.len);
}
void assemble_4_byteFF() {
noInterrupts();
msg[2].data[0] = 14; // 14 x '1's // **
msg[2].data[1] = 0; // **
msg[1].data[0] = a[2];
msg[1].data[1] = a[3];
msg[1].data[2] = a[4];
msg[1].data[3] = ((a[2] ^ a[3])^ a[4]);
interrupts();
}
void amend_len3 (struct Message & x)
{
x.len = 3;
//Serial.println(x.len);
}
void assemble_3_byteFF() {
noInterrupts();
msg[2].data[0] = 14; // 14 x '1's // **
msg[2].data[1] = 0; // **
msg[1].data[0] = a[2];
msg[1].data[1] = a[3];
msg[1].data[2] = (a[2] ^ a[3]);
interrupts();
}
void assemble_5_byteTT() {
Serial.print("ops_cv_num1 ");Serial.println(ops_cv_num1);
Serial.print("ops_cv_num2 ");Serial.println(ops_cv_num2);
Serial.print("loco num ");Serial.println(a[2]);
Serial.print("consist addr ");Serial.println(a[4]);
noInterrupts();
msg[2].data[0] = 14; // 14 x '1's // **
msg[2].data[1] = 0; // **
msg[1].data[0] = a[2]; // loco short address
msg[1].data[1] = B11101100 | ops_cv_num2; // write to VV (msb of CV number) 1110CCVV
msg[1].data[2] = ops_cv_num1; // VVVVVVVV LSB of CV number
msg[1].data[3] = a[4]; // DDDDDDDD value to write
msg[1].data[4] = msg[1].data[0] ^ msg[1].data[1]^ msg[1].data[2] ^ msg[1].data[3];
interrupts();
}
void assemble_6long_byteTT() {
noInterrupts();
msg[2].data[0] = 14; // 14 x '1's // **
msg[2].data[1] = 0; // **
msg[1].data[0] = a[2]; // loco long address
msg[1].data[1] = a[5]; // loco long address
msg[1].data[2] = B11101100 | ops_cv_num2; // write to VV (msb of CV number) 1110CCVV
msg[1].data[3] = ops_cv_num1; // VVVVVVVV LSB of CV number
msg[1].data[4] = a[4]; // DDDDDDDD value to write
msg[1].data[5] = ((((msg[1].data[0] ^ msg[1].data[1])^ msg[1].data[2]) ^ msg[1].data[3]) ^ msg[1].data[4]);
interrupts();
}
void assemble_5long_byteFF() {
noInterrupts();
msg[2].data[0] = 14; // 14 x '1's // **
msg[2].data[1] = 0; // **
msg[1].data[0] = a[2];
msg[1].data[1] = a[5];
msg[1].data[2] = a[3];
msg[1].data[3] = a[4];
msg[1].data[4] = ((a[2] ^ a[5])^ a[3] ^ a[4]);
interrupts();
}
void assemble_4long_byteFF() {
noInterrupts();
msg[2].data[0] = 14; // 14 x '1's // **
msg[2].data[1] = 0; // **
msg[1].data[0] = a[2];
msg[1].data[1] = a[5];
msg[1].data[2] = a[3];
msg[1].data[3] = ((a[2] ^ a[5])^ a[3]);
interrupts();
}
void print_data(){
Serial.print(msg[1].data[0], DEC);
Serial.print(",");
Serial.print(msg[1].data[1], DEC);
Serial.print(",");
Serial.print(msg[1].data[2], DEC);
Serial.print(",");
Serial.print(msg[1].data[3], DEC);
Serial.println(",");
}
//CV read
void cv_current(){
for (int i = 1 ; i<=10 ; i++){
sensorValue = analogRead(A0);
C = 10.8 * sensorValue ; // mA
if (C >= Cs){
cv_logic = true;
i = 11;
}
delayMicroseconds(500);
Serial.print("C = ");Serial.println(C);
if (C >= 500){
if(bluetooth.available() == true);{
bluetooth.println("Short!..");
}
}
}
}
void cv1_prog(){
reset();
for (int i = 0 ; i<=8 ; i++){
page_preset_packet();
delay(5);
}
reset();
for (int i = 0 ; i<=6 ; i++){
cv1_write_packet();
delay(5);
}
reset();
}
void reset_packet() {
amend_len3(msg[1]);
noInterrupts();
msg[2].data[0] = 24; // 14 x '1's // **
msg[2].data[1] = 1; // **
msg[1].data[0] = B00000000;
msg[1].data[1] = B00000000;
msg[1].data[2] = B00000000;
interrupts();
}
void page_preset_packet() {
amend_len3(msg[1]);
noInterrupts();
msg[2].data[0] = 24; // 24 x '1's // **
msg[2].data[1] = 1; // **
msg[1].data[0] = B01111101;
msg[1].data[1] = B00000001;
msg[1].data[2] = B01111100;
msg[1].data[3] = B00000000;
interrupts();
}
void cv1_write_packet() {
amend_len3(msg[1]);
noInterrupts();
msg[2].data[0] = 24; // 24 x '1's // **
msg[2].data[1] = 1; // **
msg[1].data[0] = B01111000; // Address only mode
msg[1].data[1] = B00000000 | Address;
msg[1].data[2] = (msg[1].data[0] ^ msg[1].data[1]);
interrupts();
}
void cv_verify1_packet() {
amend_len4(msg[1]);
noInterrupts();
msg[2].data[0] = 24; // 24 x '1's // **
msg[2].data[1] = 1; // **
msg[1].data[0] = B01111000 | MsbAddr ; // bit manipulation mode + 2 most sig bits of Address
msg[1].data[1] = B00000000 | LsbAddr;
msg[1].data[2] = B11101000 | num;
msg[1].data[3] = (msg[1].data[0] ^ msg[1].data[1]) ^ msg[1].data[2];
interrupts();
}
void cv_verify0_packet() {
amend_len4(msg[1]);
noInterrupts();
msg[2].data[0] = 24; // 24 x '1's // **
msg[2].data[1] = 1; // **
msg[1].data[0] = B01111000 | MsbAddr ; // bit manipulation mode + 2 most sig bits of Address
msg[1].data[1] = B00000000 | LsbAddr;
msg[1].data[2] = B11100000 | num;
msg[1].data[3] = (msg[1].data[0] ^ msg[1].data[1]) ^ msg[1].data[2];
interrupts();
}
void cv_write_packet() {
amend_len4(msg[1]);
noInterrupts();
msg[2].data[0] = 24; // 24 x '1's // **
msg[2].data[1] = 1; // **
msg[1].data[0] = B01111100 | MsbAddr ; // write mode + 2 most sig bits of Address
msg[1].data[1] = B00000000 | LsbAddr;
msg[1].data[2] = B00000000 | cv_write_val;
msg[1].data[3] = (msg[1].data[0] ^ msg[1].data[1]) ^ msg[1].data[2];
interrupts();
}
void valid_packet() {
amend_len4(msg[1]);
noInterrupts();
msg[2].data[0] = 14; // 16 x '1's // **
msg[2].data[1] = 0; // **
msg[1].data[0] = B00000011;
msg[1].data[1] = B00111111;
msg[1].data[2] = B00000001;
msg[1].data[3] = (msg[1].data[0] ^ msg[1].data[1]) ^ msg[1].data[2];
interrupts();
}
void idle(){
amend_len3(msg[1]);
noInterrupts();
msg[2].data[0] = 14; // 16 x '1's // **
msg[2].data[1] = 0; // **
msg[1].data[0] = B11111111;
msg[1].data[1] = B00000000;
msg[1].data[2] = B11111111;
interrupts();
}
//CV write
void repeat_cv_write() {
current();
Cs = Ccv + 30; // Cs = C + Ccv -> Cs = Ccv
Serial.print("C = ");Serial.println(C);
Serial.print("Cs = ");Serial.println(Cs);
ok = false;
for (int f = 1 ; f<=10 ; f++){
if (ok == false){
cv_write();
delay(10);
}
}
}
void reset(){
for (int j = 1 ; j<=12 ; j++){
reset_packet();
delay(5);
}
}
void cv_write(){
delay(100);
for (int i = 1 ; i<=20 ; i++){
valid_packet();
delay(5);
}
reset();
cv_logic = false;
for (int i = 1 ; i<=10 ; i++){
digitalWrite(13, HIGH); // output on
cv_write_packet();
cv_current();
Serial.print("C= ");Serial.println(C);
if (cv_logic){
ok = true;
cv_logic = false;
i = 11;
delay(50); // *
power_off = false; // *
digitalWrite(13, HIGH); // *
reset();
if(bluetooth.available() == true);{
bluetooth.print("write = ");
bluetooth.println(cv_write_val);
Serial.print("cv_write_val ");Serial.println(cv_write_val);
}
}
}
if(bluetooth.available() == true);{
if (ok == false){
bluetooth.println("write = error");
}
}
}
void calc_address(){
MsbAddr = 0;
LsbAddr = Address;
if (Address >= 255 && Address <= 511){
MsbAddr = 1;
LsbAddr = Address - 256;
}
if (Address >= 512 && Address <= 767){
MsbAddr = 2;
LsbAddr = Address - 512;
}
if (Address >= 768 && Address <= 1023){
MsbAddr = 3;
LsbAddr = Address - 768;
}
Serial.print("Address: ");Serial.println(Address);
Serial.print("LsbAddr: ");Serial.println(LsbAddr);
Serial.print("MsbAddr: ");Serial.println(MsbAddr);
}
void get_cv_num(){
cv_write_val = 0;
Serial.println(inString);
String temp ="";
int x = inString.indexOf(",") + 1;
temp = inString.substring(x,8);
Serial.println(temp);
Address = temp.toInt();
Serial.print("Address: ");Serial.println(Address);
Address = Address -1;
calc_address();
}
//
//
//
//
//
void cv_read(){
cv_val = 0;
delay(200);
current();
delay(100); // **1
for (int i = 1 ; i<=20 ; i++){
valid_packet();
delay(5);
}
reset();
Cs = Ccv + 30; // Cs = C + Ccv -> Cs = Ccv
Serial.print("Cs = ");Serial.println(Cs);
CV_VAL = 99;
for (int f = 1 ; f<=5 ; f++){
...
This file has been truncated, please download it to see its full contents.



{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.