This RC car is equipped with a camera, a Raspberry Pi, an XMC1100 Boot Kit and the DC Motor Control Shield with BTN8982TA. Based on the Donkey Car project, the Raspberry Pi is able to safe image-, throttle- and steering data which will be processed to train a neuronal network. The trained network will be placed on the Raspberry to drive the car autonomously.
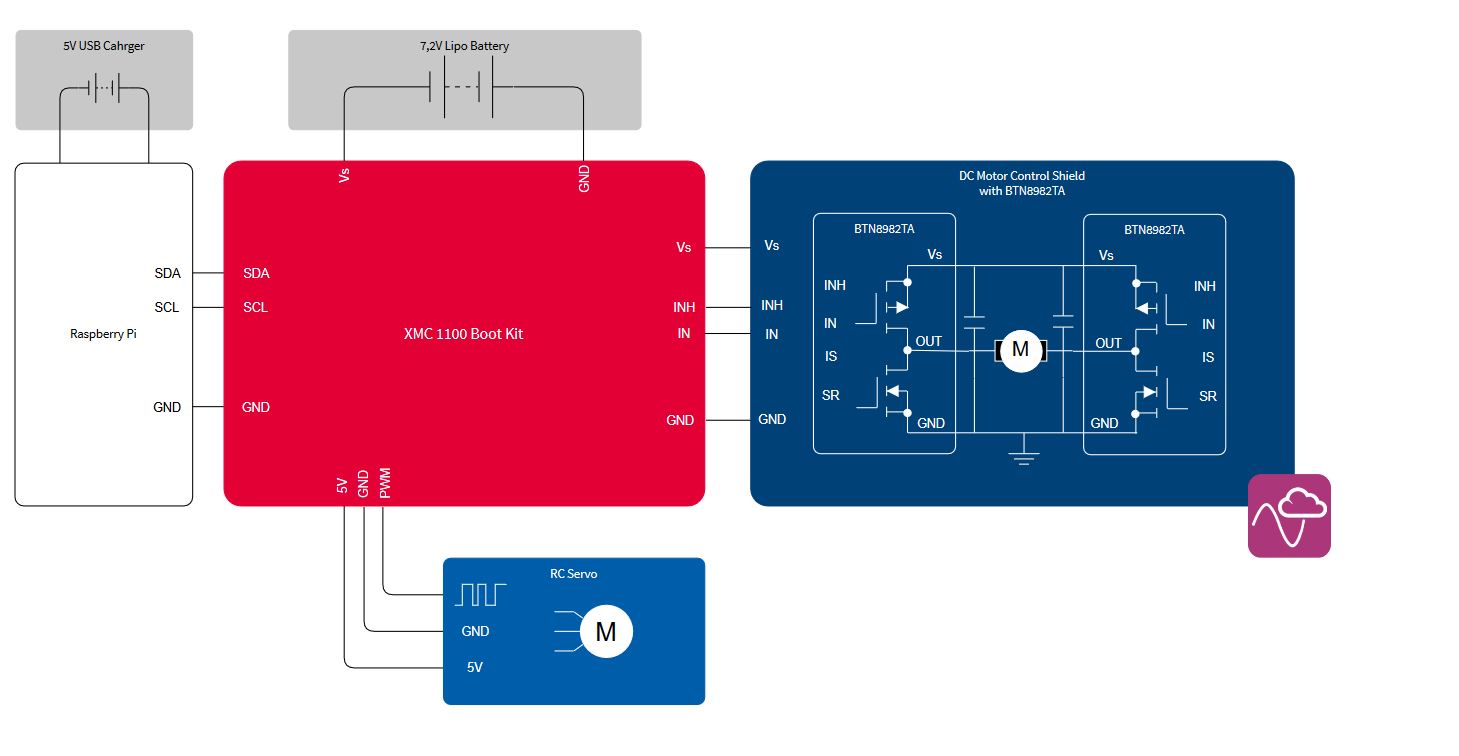
The DC motor and steering-servo are controlled via the XMC1100 Boot Kit. The Software is developed in the Arduino IDE and can be found below. It is programmed to imitate the PWM shield used within the Donkey Car project. Therefore you don’t have to change the Donkey Car software on the Raspberry Pi. The DC Motor Control Shield with BTN8982TA makes it easy to control the DC motor. You can find the library to do so on our GitHub page and adapt the motor control to your needs.
You dare to build one? Find detailed instructions HERE.






















{kind=link}
Comments
Please log in or sign up to comment.