


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
| × | 1 | ||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
 |
| |||||
 |
| |||||
Problem Statement
Leaving pets at home can be very stressful for pet owners and may be dangerous as pets develop Separation Anxiety if left alone regularly for a prolonged period. Most owners are thus apprehensive about leaving their furry friends at home during short vacations as they are unaware about the "day-to-day activities" of their pet. Our AI DRIVEN PET MONITOR aims to solve this problem.
PET Monitor
The AI DRIVEN PET MONITOR is a system that provides the owner with regular updates by identifying the pet's activities such as walking, running, sleeping, barking etc., Our tracker analyses the pet's behaviour with reference to their non-identical or irregular movements by considering various sensor inputs and thereby alerting the owner, family/friends and the vet if necessary. Factors like Temperature, Visible Light Intensity, Sound Level are also considered to protect pets from unexpected weather conditions and raise notification. Most of the current solutions only aids in feeding pet autonomously but our AI DRIVEN PET MONITOR provides the owner with updates about their pet’s activities, so they can be assured that their pet is constantly monitored and enjoy their vacation with a peaceful mind.
How it Works
SmartEdge agile device is attached to neck strap of the PET. All sensor information based on the Pet’s activity is collected and made available to inbuilt AI core (SmartEdge agile-Learn and Build Model ) for further decision making based on available trained dataset. The values of the following sensor components are processed to conclude the actual behaviour of the pet whose values are proportionate to the activity of the pet. a) Gyro/Accelerometer: These sensors respond to the pet’s activities like walking, jumping, barking, chasing, sleeping etc b) Temperature/Humidity sensor: This sensor facilitates identification of outside temperatures and aids in raising alert in case of intolerable or unexpected weather conditions. c) Microphone: Unusual sound made by the pet is tracked to identify abnormalities in pet's behaviour. Also other sensor inputs are considered while decision making apart from primary sensors in action.
Need for a PET prototype
In order to keep the process simple and evaluate SmartEdge Agile device & Brainium AI model precisely, we decided to begin with designing a PET prototype which could emulate the basic behaviour of PET movements like walking, sitting, standing, Jumping etc., at a command. Hence we ended up making our simple prototype named "Robot-Appu". It's a bluetooth controlled four legged robot driven by 4 Nos of Servo motors (SG90) hooked to an Arduino UNO through PWM/Servo driver. Let's discuss the construction details of Robot-Appu in detail.
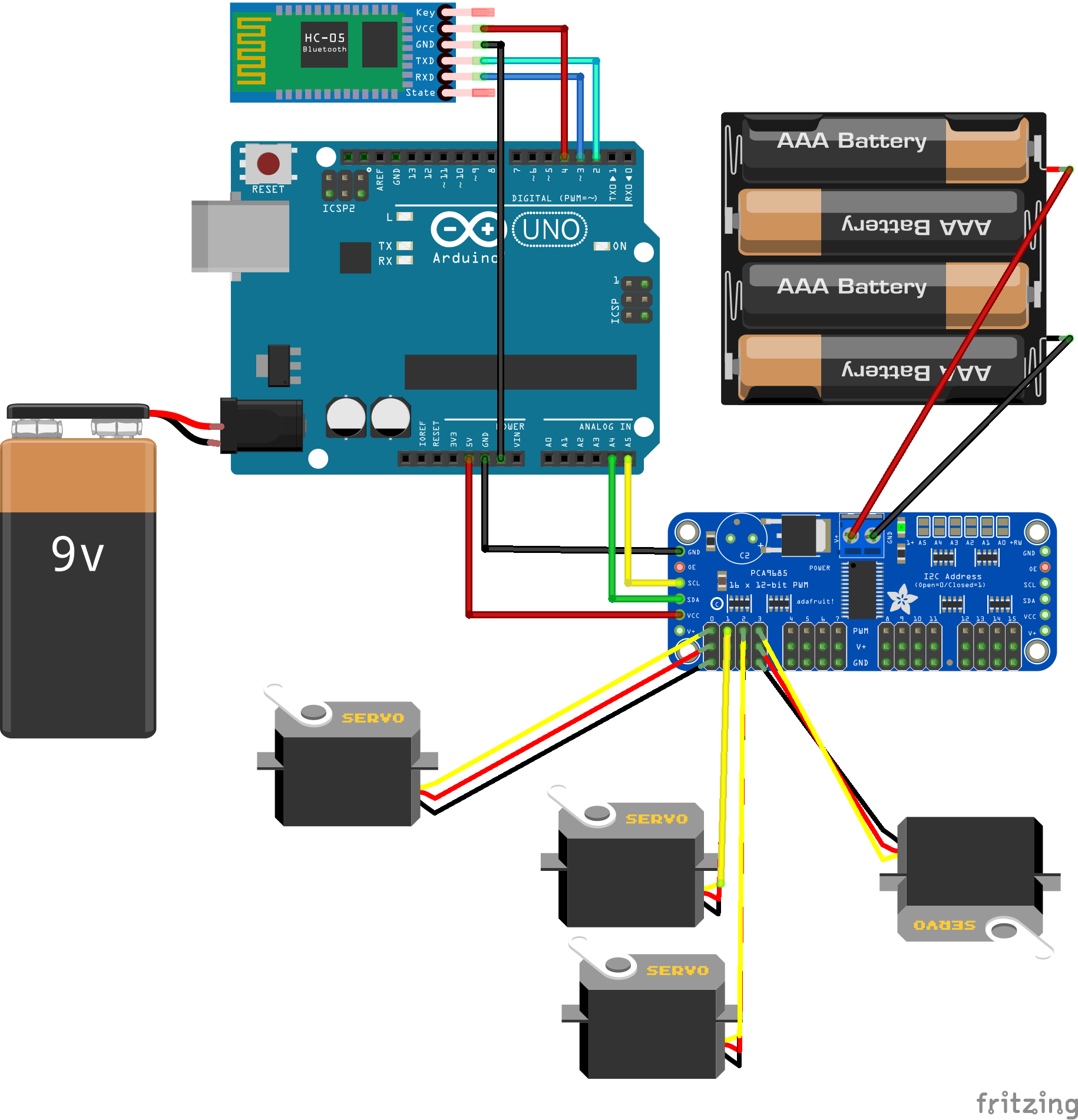
Arduino UNO powered by +5V or +9V DC source-1 (Our prototype uses a Power Bank instead) is the heart of the system which controls the servo position through PCA9685 Servo driver. Servo Driver is powered separately with a +5V DC source-2 to power all 4 servos which are in need of lot of current.
Arduino & PCA9685 Servo driver wiring:
+5v of Arduino -> VCC of Servo Driver
GND of Arduino -> GND of Servo Driver
Analog 4 of Arduino -> SDA of Servo Driver
Analog 5 of Arduino -> SCL of Servo Driver
4Nos of Servo with standard 3pin connector each are plugged on to headers of Servo Driver with ground wire (usually brown or black) aligned with the bottom row and the pulse wire (usually orange) aligned on top.
Being a prototype, Robot-Appu requires lots of fine tuning & enhancements in terms of Hardware and Software as well to make it a perfect companion robot.
Robot Control - MIT App Inventor - Android App
Our Robot's basic movements are controlled through a Android App developed with MIT App Inventor. Its as simple as sign-in with MIT App Inventor portal and begin creating android applications. We recommend the following link on developing MIT Android App
Source of our Android App is shared under code section.
SmartAgile Onboard for Intelligence
Now its time to add intelligence to our robot which is the talk of the hour. SmartAgile module is placed over the prototype with a stick tape to evaluate the key sensor parameters like
1) Temperature
2) Humitidy
3) Visible Light
4) Sound Level
5) Detect Movement in Action (Involves Training Model)
Firstly, make SmartAgile module ready for communicating with Brainium platform with a simple setup procedure in its portal. Next choose a gateway to handle data from SmartAgile module and put in place in cloud. There are option for
Now add your device through the portal and you are ready to go.
After logging into Brainium platform, click on the + icon to create a new project. Give a suitable project name and a cover picture and click "Create Project". Now the project is created. Click on the created project and link the device to the project under consideration. Once the device successfully linked, it time to add widgets of interest by click on "Create Widget +" icon. As AI is only applicable to movement scenarios, other parameters like Temperature, Humidity, Sound level, visible light are considered under Tracking and rules are created to make ALERT / EMAIL when values of those sensors move over or below mention threshold value.
To create training model for detect motion, click on "Motion Recognition" button in the side bar and create a AI Workspace. Once AI workspace is created, different motions/activities are created separately to record new training set under each motions. In our case we created following Motions
1) RobotAppu-Stand: Motion to capture POSITION - STAND
2) RobotAppu-Sit: Motion to capture POSITION - SIT
3) RobotAppu-Walk: Motion to capture POSITION-WALK
About 15-50 nos of training sets are recorded for each motion by placing the SmartAgile module over the prototype "Robot-Appu" and triggering the respective action through the Android App. When all training sets are recorded, its time to Generate Model based on recorded training sets. Finally Generated AI Model is linked to the device (SmartAgile) module and from now on AI come into action for decision making (It's ALERT/EMAIL system in our case). At last separate widget for AI model is created and all alerts are available from AI injected SmartAgile module in realtime.
Conclusion
Thus Brainium AI model is successfully incorporated into the project with SmartAgile module. Now the AI Driven PET Monitor can post pet activities and environmental factors like temperature, humidity, visible light, sound level to the Pet Owner. There are many more criteria to be considered, as the potential of SmartAgile along with AI are still yet to be explored to its fullest. Predictive Maintenance option can be used to evaluate irregular and abnormal activities of the PET for immediate counter actions. Also MQTT API can be used to push realtime or critical data to Mobile App of owner. MIT App Inventor can also be handy in Android App development. Its all limitless and lets keep it evolving.
{kind=link}

Comments