Thanks for checking my Bluetooth controlled Nerf turret project. I don't think there is too much explaining to do here, this is a Nerf turret controlled via Bluetooth either from an Android device or a PC.
....................https://www.littlefrenchkev.com/bluetooth-nerf-turret....................
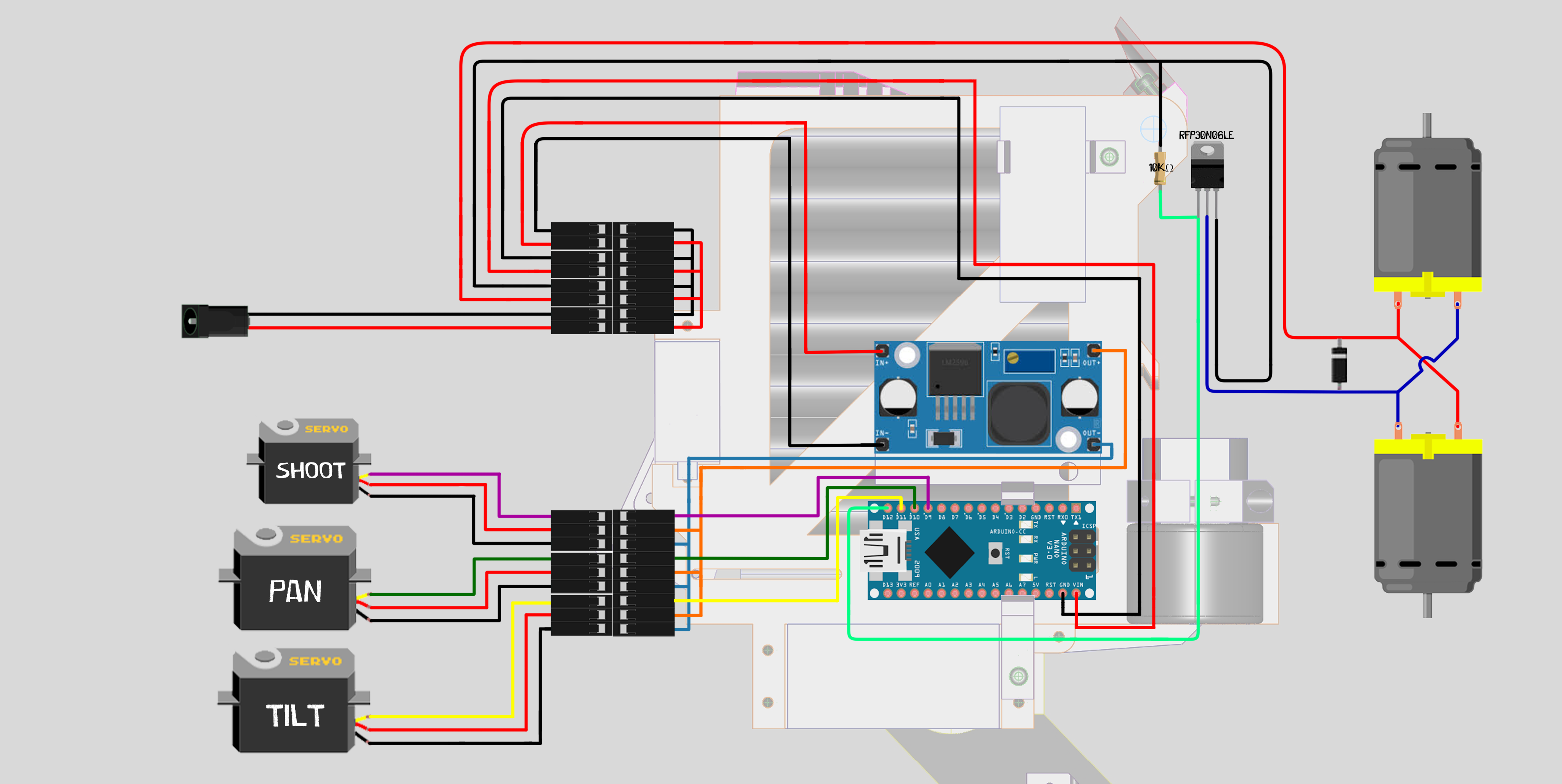
HOW DOES IT WORK ?Nothing super complex. The tilt and pan movement is handled by 2 servos driven by an Arduino Nano.
The darts are shot using 2 rollers spun by 2 small DC motors. A servo pushes the darts into the rollers when the order to shoot is sent.The magazine can hold 7 darts.
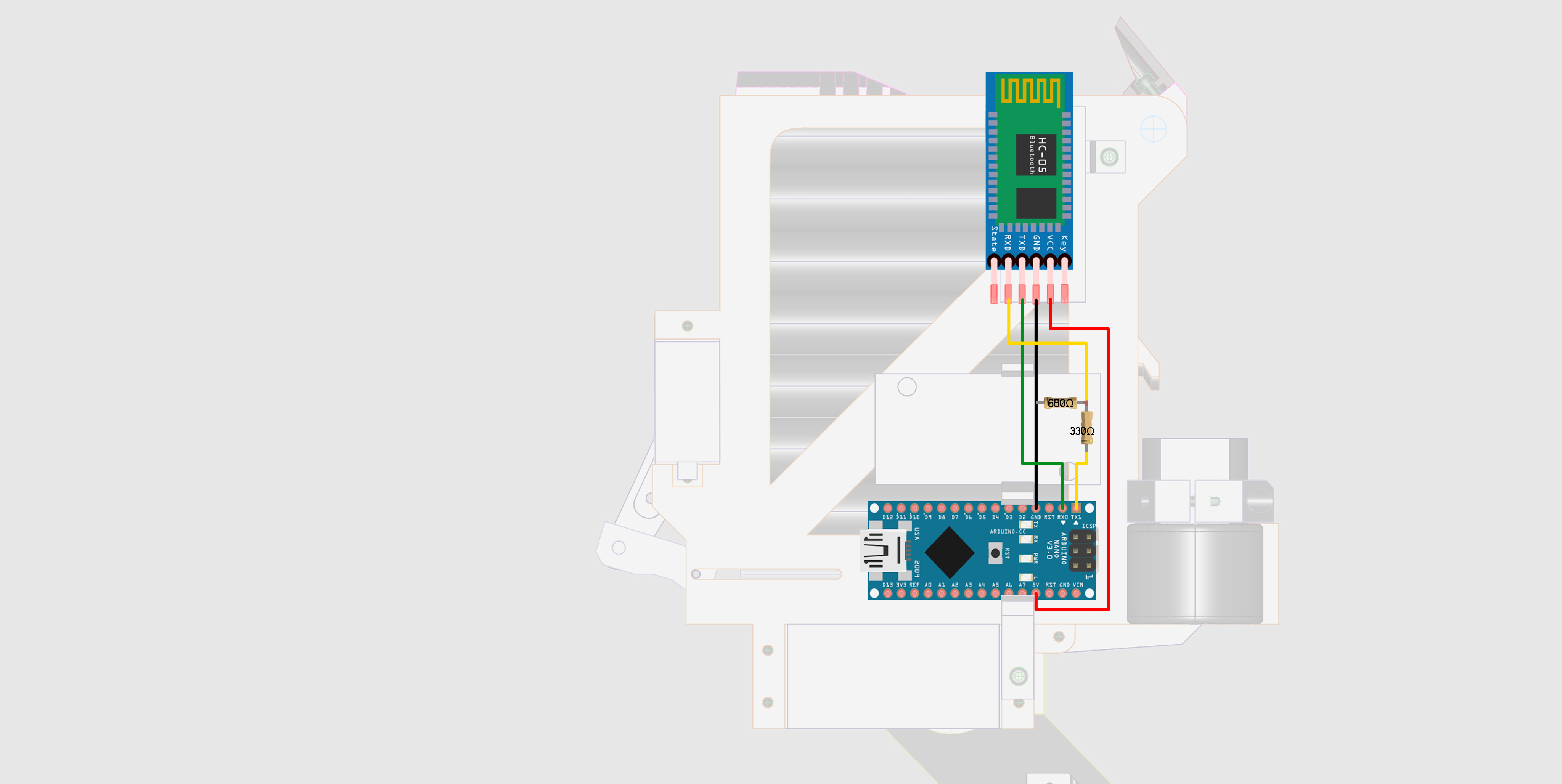
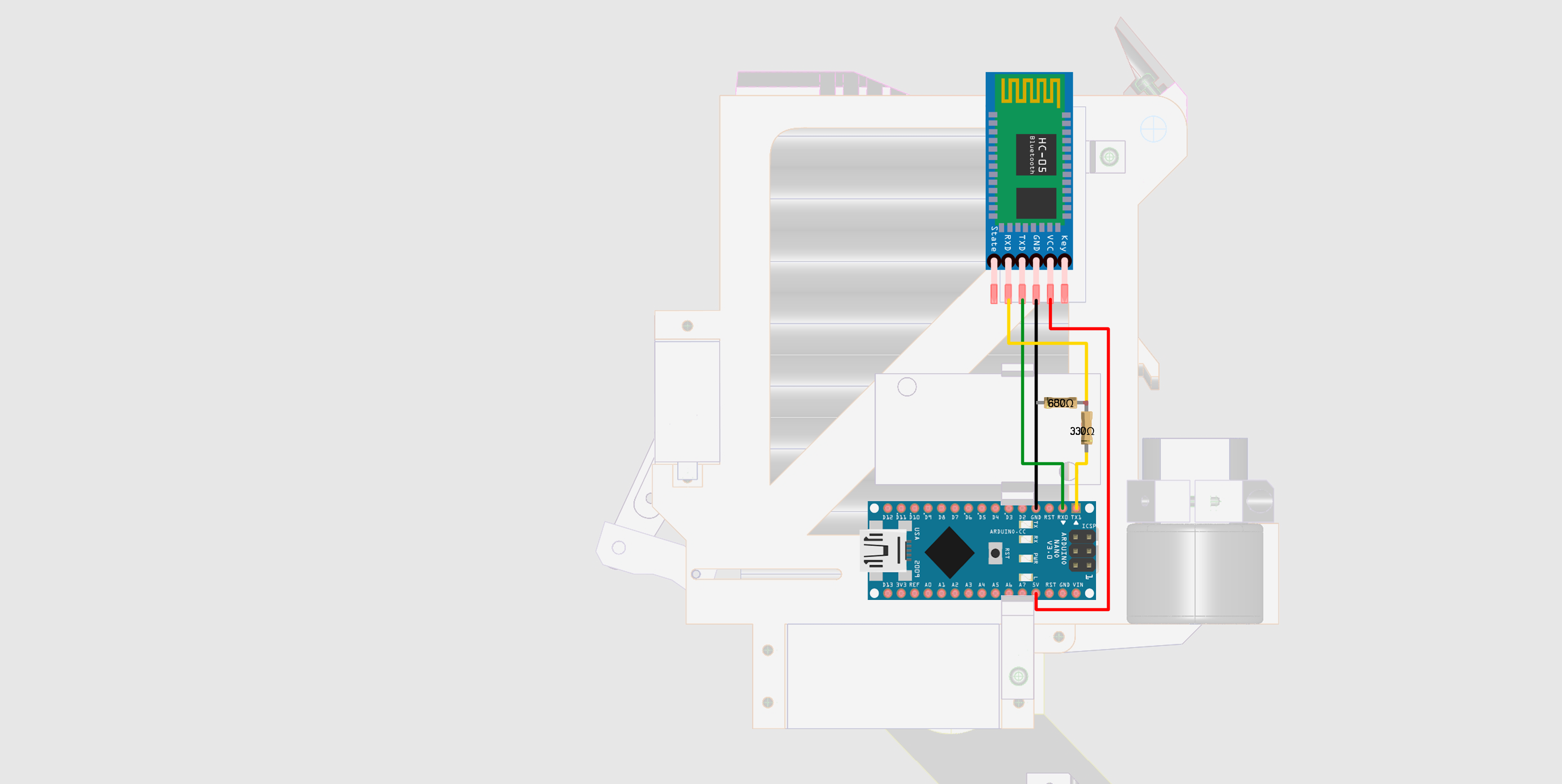
As mentionned above it is controlled via Bluetooth either from an android device or a PC.
HOW TO BUILD IT ?ASSEMBLY :
The tripod and magazine comes in two different versions. One designed for MG-90s servos and the other for MG996r servos. MG996r servos can be power hungry. Make sure your power supply will be up to the job if you decide to use them.
Tripod :
Magazine :
WIRING :
SOFTWARE AND TEST !!!
SOME EXTRA PHOTOS BECAUSE WHY NOT !!!








{kind=link}
{kind=link}
Comments