#include <Servo.h>
Servo myservo; // create 4 servo objects to control the servos
Servo myservo1;
Servo myservo2;
Servo myservo3;
int angle = 90; // initial angle for servo
int angle1 = 90;
int angle2 = 90;
int angle3 = 90;
int angleStep = 5;
#define LEFT 10 // pin 10 is connected to left button
#define RIGHT 11 // pin 11 is connected to right button
#define LEFT1 2 // pin 2 is connected to right button
#define RIGHT1 3 // pin 3 is connected to right button
#define LEFT2 6 // pin 6 is connected to right button
#define RIGHT2 7 // pin 7 is connected to right button
#define RIGHT3 4 // pin 4 is connected to right button
#define LEFT3 5 // pin 5 is connected to right button
void setup() {
Serial.begin(9600); // setup serial
myservo.attach(8); // attaches the servo on pin 9 to the servo object
myservo1.attach(9);
myservo2.attach(12);
myservo3.attach(13);
pinMode(LEFT, INPUT_PULLUP); // assign pins as input left button
pinMode(RIGHT, INPUT_PULLUP); // assing pins as input for right button
pinMode(LEFT1, INPUT_PULLUP);
pinMode(RIGHT1, INPUT_PULLUP);
pinMode(LEFT2, INPUT_PULLUP);
pinMode(RIGHT2, INPUT_PULLUP);
pinMode(LEFT3, INPUT_PULLUP);
pinMode(RIGHT3, INPUT_PULLUP);
myservo.write(angle); // send servo to the middle at 90 degrees
myservo1.write(angle1); // send servo to the middle at 90 degrees
myservo1.write(angle2); // send servo to the middle at 90 degrees
myservo1.write(angle3); // send servo to the middle at 90 degrees
}
void loop() {
////////////////////////////////////////////////////////////////////////
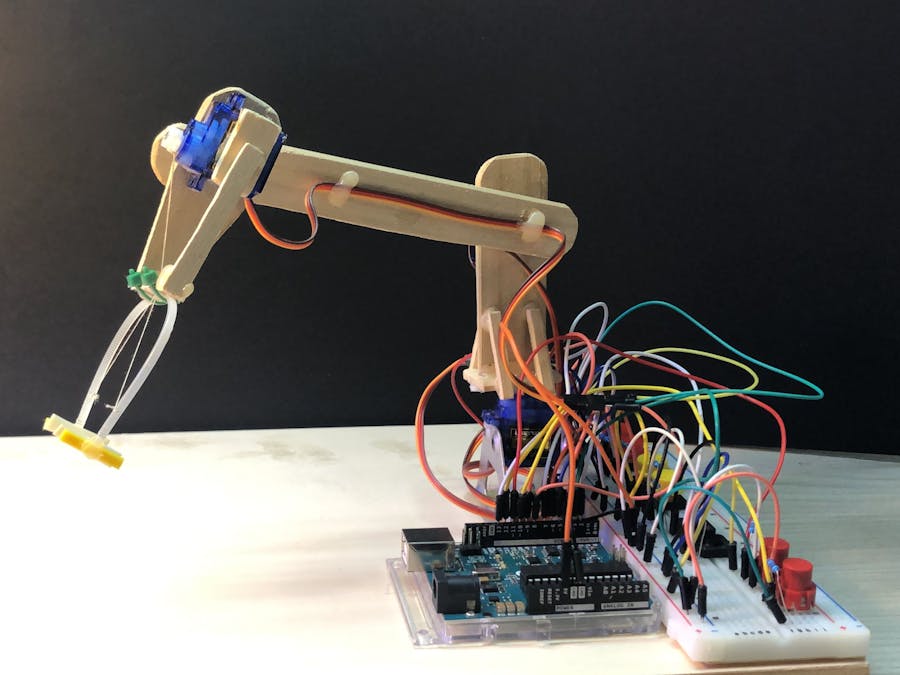
//visit the website for the complete code: http://www.makosite.one/robotic-arm.php
////////////////////////////////////////////////////////////////////////


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






_o3ByB1wgd6.png)


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
_o3ByB1wgd6.png){kind=link}
Comments
Please log in or sign up to comment.