/*
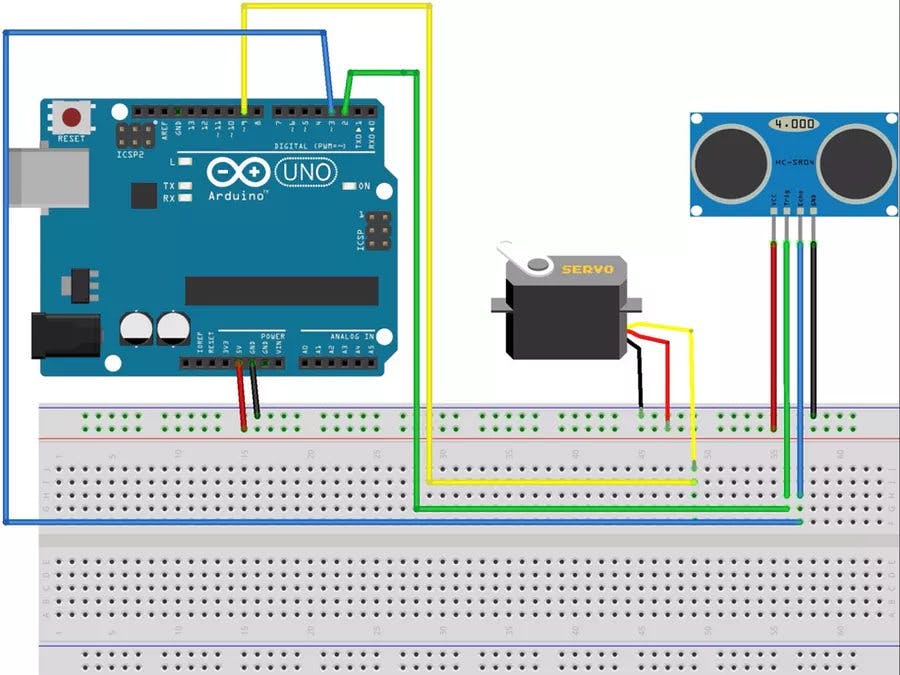
Radar Screen Visualisation for HC-SR04
Maps out an area of what the HC-SR04 sees from a top down view.
Takes and displays 2 readings, one left to right and one right to left.
Displays an average of the 2 readings
Displays motion alert if there is a large difference between the 2 values.
for more projects ----> teamdiy.in
*/
import processing.serial.*; // import serial library
Serial arduinoport; // declare a serial port
float x, y; // variable to store x and y co-ordinates for vertices
int radius = 350; // set the radius of objects
int w = 300; // set an arbitary width value
int degree = 0; // servo position in degrees
int value = 0; // value from sensor
int motion = 0; // value to store which way the servo is panning
int[] newValue = new int[181]; // create an array to store each new sensor value for each servo position
int[] oldValue = new int[181]; // create an array to store the previous values.
PFont myFont; // setup fonts in Processing
int radarDist = 0; // set value to configure Radar distance labels
int firstRun = 0; // value to ignore triggering motion on the first 2 servo sweeps
/* create background and serial buffer */
void setup(){
// setup the background size, colour and font.
size(1204, 650);
background (0); // 0 = black
myFont = createFont("verdana", 12);
textFont(myFont);
// setup the serial port and buffer
arduinoport = new Serial(this, "COM3", 9600);
}
/* draw the screen */
void draw(){
fill(0); // set the following shapes to be black
noStroke(); // set the following shapes to have no outline
ellipse(radius, radius, 750, 750); // draw a circle with a width/ height = 750 with its center position (x and y) set by the radius
rectMode(CENTER); // set the following rectangle to be drawn around its center
rect(350,402,800,100); // draw rectangle (x, y, width, height)
if (degree >= 179) { // if at the far right then set motion = 1/ true we're about to go right to left
motion = 1; // this changes the animation to run right to left
}
if (degree <= 1) { // if servo at 0 degrees then we're about to go left to right
motion = 0; // this sets the animation to run left to right
}
/* setup the radar sweep */
/*
We use trigonmetry to create points around a circle.
So the radius plus the cosine of the servo position converted to radians
Since radians 0 start at 90 degrees we add 180 to make it start from the left
Adding +1 (i) each time through the loops to move 1 degree matching the one degree of servo movement
cos is for the x left to right value and sin calculates the y value
since its a circle we plot our lines and vertices around the start point for everything will always be the center.
*/
strokeWeight(7); // set the thickness of the lines
if (motion == 0) { // if going left to right
for (int i = 0; i <= 20; i++) { // draw 20 lines with fading colour each 1 degree further round than the last
stroke(0, (10*i), 0); // set the stroke colour (Red, Green, Blue) base it on the the value of i
line(radius, radius, radius + cos(radians(degree+(180+i)))*w, radius + sin(radians(degree+(180+i)))*w); // line(start x, start y, end x, end y)
}
} else { // if going right to left
for (int i = 20; i >= 0; i--) { // draw 20 lines with fading colour
stroke(0,200-(10*i), 0); // using standard RGB values, each between 0 and 255
line(radius, radius, radius + cos(radians(degree+(180+i)))*w, radius + sin(radians(degree+(180+i)))*w);
}
}
/* Setup the shapes made from the sensor values */
noStroke(); // no outline
/* first sweep */
fill(0,50,0); // set the fill colour of the shape (Red, Green, Blue)
beginShape(); // start drawing shape
for (int i = 0; i < 180; i++) { // for each degree in the array
x = radius + cos(radians((180+i)))*((oldValue[i])); // create x coordinate
y = radius + sin(radians((180+i)))*((oldValue[i])); // create y coordinate
vertex(x, y); // plot vertices
}
endShape(); // end shape
/* second sweep */
fill(0,110,0);
beginShape();
for (int i = 0; i < 180; i++) {
x = radius + cos(radians((180+i)))*(newValue[i]);
y = radius + sin(radians((180+i)))*(newValue[i]);
vertex(x, y);
}
endShape();
/* average */
fill(0,170,0);
beginShape();
for (int i = 0; i < 180; i++) {
x = radius + cos(radians((180+i)))*((newValue[i]+oldValue[i])/2); // create average
y = radius + sin(radians((180+i)))*((newValue[i]+oldValue[i])/2);
vertex(x, y);
}
endShape();
/* if after first 2 sweeps, highlight motion with red circle*/
if (firstRun >= 360) {
stroke(150,0,0);
strokeWeight(1);
noFill();
for (int i = 0; i < 180; i++) {
if (oldValue[i] - newValue[i] > 35 || newValue[i] - oldValue[i] > 35) {
x = radius + cos(radians((180+i)))*(newValue[i]);
y = radius + sin(radians((180+i)))*(newValue[i]);
ellipse(x, y, 10, 10);
}
}
}
/* set the radar distance rings and out put their values, 50, 100, 150 etc.. */
for (int i = 0; i <=6; i++){
noFill();
strokeWeight(1);
stroke(0, 255-(30*i), 0);
ellipse(radius, radius, (100*i), (100*i));
fill(0, 100, 0);
noStroke();
text(Integer.toString(radarDist+50), 380, (305-radarDist), 50, 50);
radarDist+=50;
}
radarDist = 0;
/* draw the grid lines on the radar every 30 degrees and write their values 180, 210, 240 etc.. */
for (int i = 0; i <= 6; i++) {
strokeWeight(1);
stroke(0, 55, 0);
line(radius, radius, radius + cos(radians(180+(30*i)))*w, radius + sin(radians(180+(30*i)))*w);
fill(0, 55, 0);
noStroke();
if (180+(30*i) >= 300) {
text(Integer.toString(180+(30*i)), (radius+10) + cos(radians(180+(30*i)))*(w+10), (radius+10) + sin(radians(180+(30*i)))*(w+10), 25,50);
} else {
text(Integer.toString(180+(30*i)), radius + cos(radians(180+(30*i)))*w, radius + sin(radians(180+(30*i)))*w, 60,40);
}
}
/* Write information text and values. */
noStroke();
fill(0);
rect(350,402,800,100);
fill(0, 100, 0);
text("Degrees: "+Integer.toString(degree), 100, 380, 100, 50); // use Integet.toString to convert numeric to string as text() only outputs strings
text("Distance: "+Integer.toString(value), 100, 400, 100, 50); // text(string, x, y, width, height)
text("Radar screen code ", 540, 380, 250, 50);
fill(0);
rect(70,60,150,100);
fill(0, 100, 0);
text("Screen Key:", 100, 50, 150, 50);
fill(0,50,0);
rect(30,53,10,10);
text("First sweep", 115, 70, 150, 50);
fill(0,110,0);
rect(30,73,10,10);
text("Second sweep", 115, 90, 150, 50);
fill(0,170,0);
rect(30,93,10,10);
text("Average", 115, 110, 150, 50);
noFill();
stroke(150,0,0);
strokeWeight(1);
ellipse(29, 113, 10, 10);
fill(150,0,0);
text("Motion", 115, 130, 150, 50);
fill(0,450,500);
text("Developed by: VAISAKH ", 350, 400, 150, 50);
text("teamdiy.in ", 400, 430, 150, 50);
fill(0,110,0);
}
/* get values from serial port */
void serialEvent (Serial arduinoport) {
String xString = arduinoport.readStringUntil('\n'); // read the serial port until a new line
if (xString != null) { // if theres data in between the new lines
xString = trim(xString); // get rid of any whitespace just in case
String getX = xString.substring(1, xString.indexOf("V")); // get the value of the servo position
String getV = xString.substring(xString.indexOf("V")+1, xString.length()); // get the value of the sensor reading
degree = Integer.parseInt(getX); // set the values to variables
value = Integer.parseInt(getV);
oldValue[degree] = newValue[degree]; // store the values in the arrays.
newValue[degree] = value;
/* sets a counter to allow for the first 2 sweeps of the servo */
firstRun++;
if (firstRun > 360) {
firstRun = 360; // keep the value at 360
}
}
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







Comments