


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 6 | |||
 |
| × | 20 | |||
 |
| × | 1 | |||
Drones are one of the most interesting topics in the engineering world and controlling them is an important and challenging issue. In this tutorial we are going to learn how to build a controller for DJI Tello Drone using an Arduino. DJI Tello is an open source Drone. You can program Tello with popular programming languages such as C++, Python, JavaScript or MATLAB.
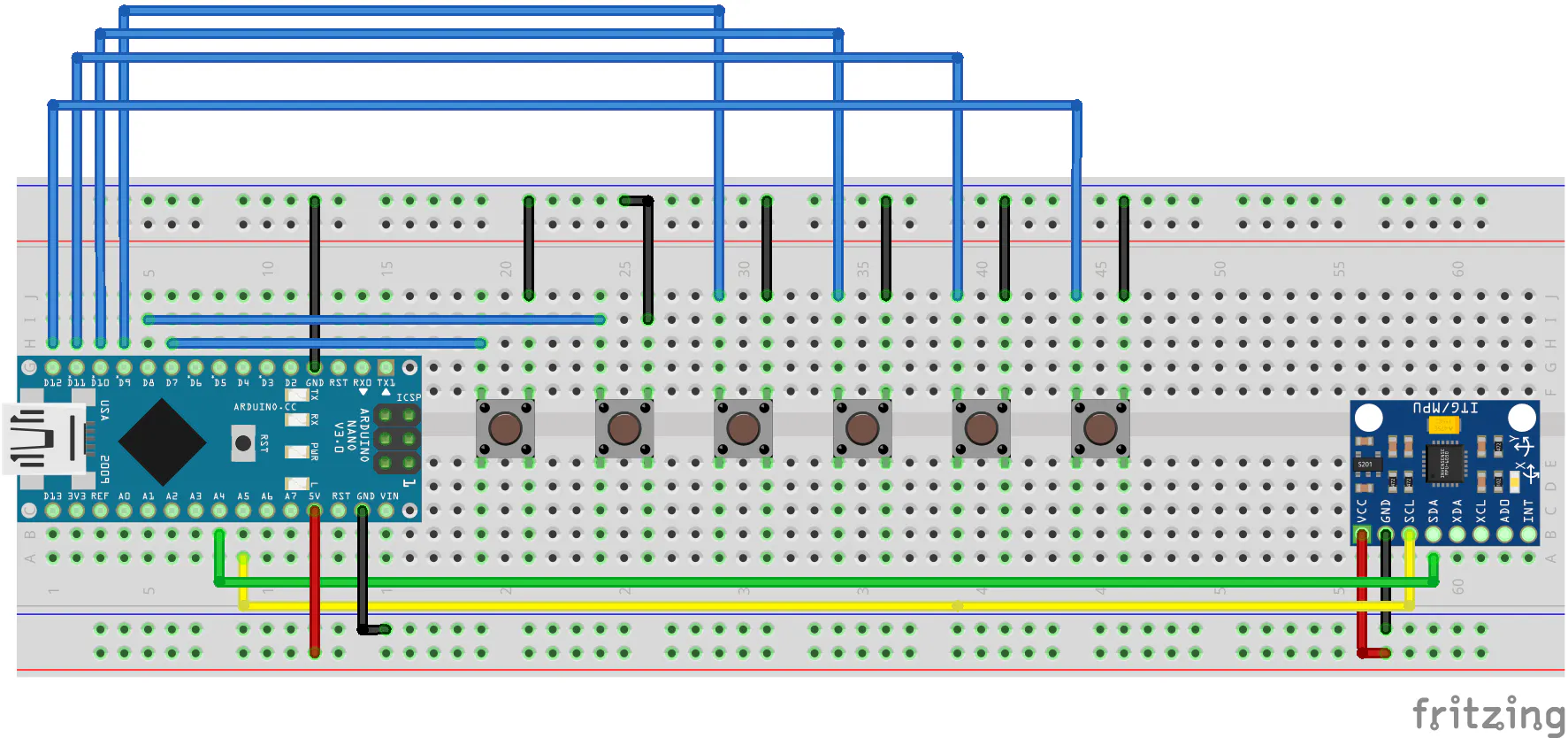
What's this all about?In this project, we are going to build a controller for the DJI Tello quadcopter with an Arduino board, MPU-6050 gyroscope module and 6 push buttons. You can see the schematic of the circuit in fritzing software in the image below.
you can see all details about this project in this video.
SoftwareThe Arduino communicates with a Python script through serial communication. This Python script controls the quadcopter via WiFi connection and UDP protocol. Before we start programming with Python, we need to install a library called easytello. All codes are at the end of this article.
pip3 install easytelloYou can use another library called djitellopy.
pip3 install djitellopyAfter completing the program, we turn on the quadcopter and connect the computer WiFi to it. The Arduino must also be connected to the computer via a USB cable. Now we run the program and see that we can control Tello with this controller







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.