



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
A 2w car with an Arduino Uno R3 controlled over Bluetooth through smartphone by sending various commands. This robotic car has three basic devices to control our smartphone controlled car using Arduino. One is Arduino Uno R3, an H-bridge module and Bluetooth module. You will see all of these three devices in this video:
The world is progressing so fast that it is expected that in future there will be robots working here and there instead of human being. A man always trying its best to comfort human life. As most of peoples believes that we are not the residence of earth. so that is reason we need a proper care because our muscles are not made for earth enoverment, that why we are making robots.so to study robotics is one of my passion of my life.Nowadays smartphones can be used to control a host of electrical and electronic devices including motors, music systems and lights. Here we present an Arduino based robot car, which can be controlled using an Android smartphone having ArduinoRC application installed in it. This bot receives commands from your smartphone with the help of a Bluetooth module.Here are some benefits smartphone controlled robotic car
- Car can be used for surveillance at home
- Smart car can be used to pick and place objects ( further upgradations are required ), in block 2 I will attach a homemade robotic arm with it, that will help to pick and place objects
- Bluetooth controlled car
Arduino Uno: The Arduino Uno is a microcontroller board based on the ATmega328P (datasheet). It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz quartz crystal, a USB connection, a power jack, an ICSP header and a reset button. It contains everything needed to support the microcontroller; simply connect it to a computer with a USB cable or power it with a AC-to-DC adapter or battery to get started.. You can tinker with your UNO without worrying too much about doing something wrong, worst case scenario you can replace the chip for a few dollars and start over again.
"Uno" means one in Italian and was chosen to mark the release of Arduino Software (IDE) 1.0. The Uno board and version 1.0 of Arduino Software (IDE) were the reference versions of Arduino, now evolved to newer releases. The Uno board is the first in a series of USB Arduino boards, and the reference model for the Arduino platform; for an extensive list of current, past or outdated boards see the Arduino index of boards.
Bluetooth Module The HC-06 is a class 2 slave Bluetooth module (click to shop) designed for transparent wireless serial communication. Once it is paired to a master Bluetooth device such as PC, smartphones and tablet, its operation becomes transparent to the user. All data received through the serial input is immediately transmitted over the air. When the module receives wireless data, it is sent out through the serial interface exactly at it is received. No user code specific to the Bluetooth module is needed at all in the user microcontroller program.
The HC-06 will work with supply voltage of 3.6VDC to 6VDC, however, the logic level of RXD pin is 3.3V and is not 5V tolerant. A Logic Level Converter Is recommended to protect the sensor if connect it to a 5V device (e.g Arduino Uno and Mega). H-Bridge Motor Driver H-bridge (click to Shop ) is an electronic circuit that switches the polarity of a voltage applied to a load. These circuits are often used in robotics and other applications to allow DC motors to run forwards or backwards.[1]Most DC-to-AC converters (power inverters), most AC/AC converters, the DC-to-DC push–pull converter, most motor controllers, and many other kinds of power electronics use H bridges. In particular, a bipolar stepper motor is almost invariably driven by a motor controller containing two H bridges.
Moreover, if you do not know how to install driver for Arduino software then click here to watch the video.
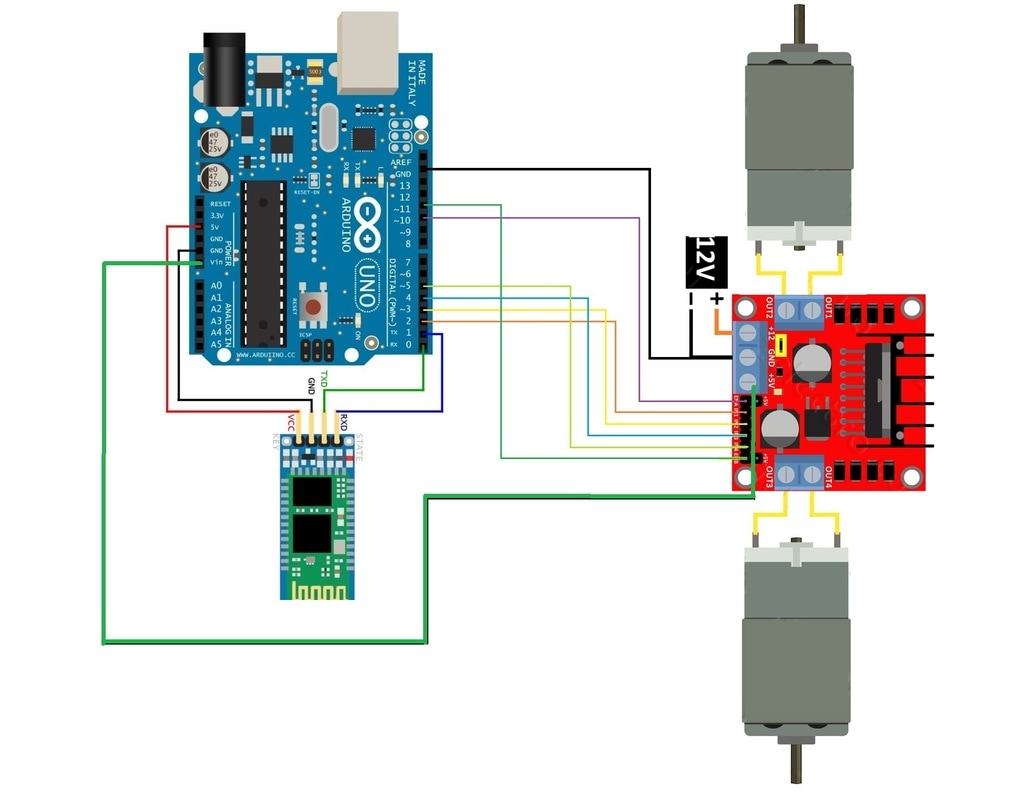
Make all the connection according to the circuit diagram.
Here is the link to my website







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.