/***
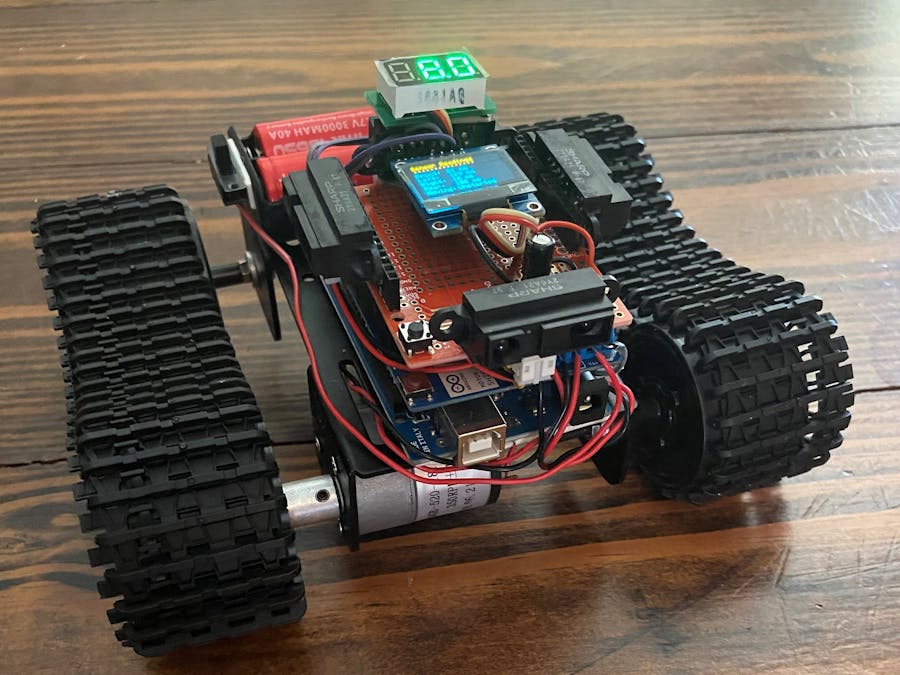
* Track Robot w/ Arduino Mega 2560, motor shield v3, OLED, and Sharp IR sensors
* 1-19-2020
* by My Parts Chest
* https://mypartschest.com
* https://mypartschest.blogspot.com/
*/
#include <SharpIR.h>
#include <SPI.h>
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 64 // OLED display height, in pixels
#define SHARP_MODEL 1080
//global vars
bool startup = false;
bool firstLoop = false;
bool motorsOn = false;
int stopTimer = 0;
String heading = "Unstarted";
//declar OLED pins
const int SDA_PIN = 20;
const int SDC_PIN = 21;
//Declare pins for motor control
const int dirA = 13;
const int dirB = 12;
const int speedA = 11;
const int speedB = 3;
const int brakeA = 8;
const int brakeB = 9;
const int highSpeed = 255;
const int lowSpeed = 240;
// Analog pins for distance sensors
const byte frontSensorPin = A0;
const byte driverSensorPin = A1;
const byte passengerSensorPin = A2;
const byte rearSensorPin = A3;
// Declaration for an SSD1306 display connected to I2C (SDA, SCL pins)
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, -1);
// Create an object instance of the SharpDistSensor class
SharpIR frontSensor = SharpIR(frontSensorPin, SHARP_MODEL);
SharpIR driverSensor = SharpIR(driverSensorPin, SHARP_MODEL);
SharpIR passengerSensor = SharpIR(passengerSensorPin, SHARP_MODEL);
SharpIR rearSensor = SharpIR(rearSensorPin, SHARP_MODEL);
void setup() {
// Setup Channel A & B
pinMode(dirA, OUTPUT); //Init Motor A (rear-driver's side)
pinMode(dirB, OUTPUT); //Init Motor B (front-passenger's side)
pinMode(brakeA, OUTPUT); //Init Brake A
pinMode(brakeB, OUTPUT); //Init Brake B
// Init display
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3D for 128x64
Serial.println(F("SSD1306 allocation failed"));
for(;;);
}
delay(2000);
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0, 0);
// Display static text
display.println("Initializing...");
display.display();
delay(1000);
startup = false;
firstLoop = true;
motorsOn = true;
}
void loop() {
//local vars
int frontDistance;
int driverDistance;
int passengerDistance;
int rearDistance;
// Get distance from sensors
frontDistance = frontSensor.distance();
driverDistance = driverSensor.distance();
passengerDistance = passengerSensor.distance();
rearDistance = rearSensor.distance();
//update OLED
updateDisplay(frontDistance, driverDistance, passengerDistance, rearDistance, heading);
if (startup)
{
if (frontSensor.distance() > 30)
{
firstLoop = false;
heading = "Forward";
//forward B (front motor)
move("B", "FWD", highSpeed);
//forward A (rear motor)
move("A", "FWD", lowSpeed); //rear motor is running a little faster than the front motor; so slow it down
delay(100);
stopTimer = 0;
}
else //less than 30cm; something is in the way
{
if (heading == "Forward" && !firstLoop) //make sure this isn't at startup and I'm not already turning
{
fullStop(100); //stop during testing to read sensors
//back up if too close to something
if (frontSensor.distance() < 10)
{
//forward B (front motor)
move("B", "REV", highSpeed);
//forward A (rear motor)
move("A", "REV", lowSpeed);
delay(100);
}
if (passengerSensor.distance() > driverSensor.distance()) //what has more distance, left or right?
{
heading = "Turning Right";
int lastFront = frontSensor.distance();
while (driverSensor.distance() != lastFront)
{
updateDisplay(frontDistance, driverDistance, passengerDistance, rearDistance, heading);
turnRight(500);
if (frontSensor.distance() > 30)
{
break;
}
}
}
else
{
heading = "Turning Left";
int lastFront = frontSensor.distance();
while (passengerSensor.distance() != lastFront)
{
updateDisplay(frontDistance, driverDistance, passengerDistance, rearDistance, heading);
turnLeft(500);
if (frontSensor.distance() > 30)
{
break;
}
}
}
}
else
{
stopTimer++;
if (stopTimer > 100)
{
heading = "Stopped";
fullStop(100);
//display stopped
updateDisplay(frontDistance, driverDistance, passengerDistance, rearDistance, "Stopped!");
exit(0);
}
}
}
}
else //loop forever until I put my hand in front of the forward sensor
{
if (frontDistance < 11)
{
delay(1000);
startup = true;
}
else
{
delay(20);
}
}
}
void fullStop(int duration)
{
move("A", "FWD", 0);
move("B", "FWD", 0);
delay(duration);
}
void turnRight(int duration)
{
move("A", "FWD", highSpeed);
move("B", "REV", highSpeed);
delay(duration);
}
void turnLeft(int duration)
{
move("A", "REV", highSpeed);
move("B", "FWD", highSpeed);
delay(duration);
}
void move(String channel, String direction, int speed )
{
int motor = dirA;
int pwm = speedA;
int brake = brakeA;
bool highLow = HIGH;
if (motorsOn)
{
if (direction == "REV")
highLow = LOW;
if (channel == "B")
{
motor = dirB;
pwm = speedB;
brake = brakeB;
//reverse directions for motor B
highLow = !highLow;
}
if (speed == 0) //brake
{
digitalWrite(brake, HIGH);
}
else
{
digitalWrite(motor, highLow);
digitalWrite(brake, LOW);
analogWrite(pwm, speed);
}
}
}
void updateDisplay(int fd, int dd, int pd, int rd, String hd)
{
//write to OLED
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0, 0);
display.print("Sensor Readings");
display.setCursor(0, 5);
display.print("...............");
// Display sensor readings
display.setCursor(0, 16);
display.print("Front: ");
display.setCursor(45, 16);
display.print(fd);
display.print(" cm");
display.setCursor(0, 26);
display.print("Left: ");
display.setCursor(45, 26);
display.print(dd);
display.print(" cm");
display.setCursor(0, 36);
display.print("Right: ");
display.setCursor(45, 36);
display.print(pd);
display.print(" cm");
display.setCursor(0, 46);
display.print("Rear: ");
display.setCursor(45, 46);
display.print(rd);
display.print(" cm");
display.setCursor(0, 56);
display.print("Moving: ");
display.setCursor(45, 56);
display.print(hd);
display.display();
}



_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











Comments
Please log in or sign up to comment.