


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Our project is an automatic pet feeding system using the Internet of Things. The emphasis on choosing this as the title is because to initially give a solution to a problem faced by almost everyone. Human interference on the part of taking care of pets when they are busy is difficult and hence our system will be efficient enough to overcome the hurdles faced by humans in taking care of pets. This Pet feeding system is completely equipped for feeding the pet. Furthermore, the project is subdivided into several modules each of which has the Google assistant unique feature. Those are pet food feeders and voice commands.
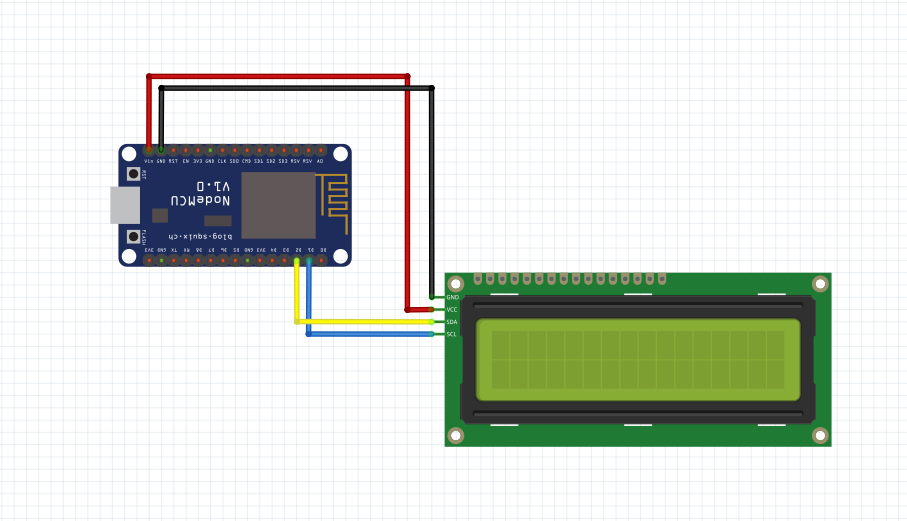
This is the block diagram of the pet feeder. This shows the overall view of the pet feeder circuit. The blocks connected here are LCD display, I2C module, Google assistant, Servo motor, Power supply.
CONCEPT AND OVERVIEW
There are many ways to implement a pet feeder: you can set it to fill up the bowl at a certain time, you can command it to fill up whenever it gets empty, or maybe to give your dog food after they follow a set of orders that you taught them.
In this specific project, the command instruction is given by the user through voice command by the platform google.
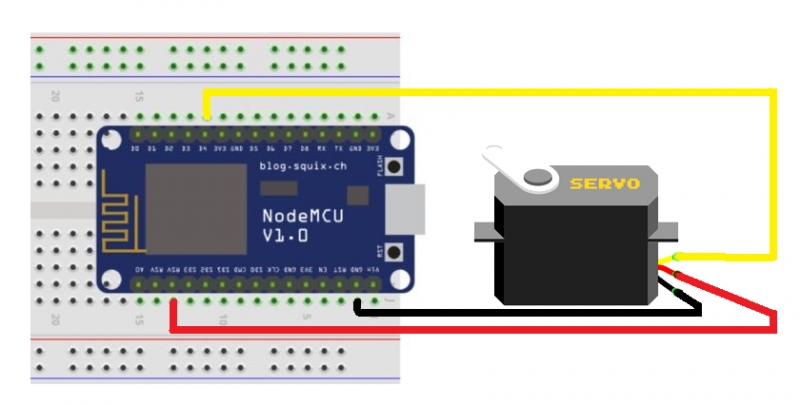
In addition, we also decided to add the option for user-defined to feed the pet at a specific time interval. The combination of MQTT and IFTTT is used to integrate for a seamless connection between user and pet feeder. After the instruction the received the servo motor is activated.
MQTT INTEGRATION
MQTT stands for MQ Telemetry Transport. It is a publish/subscribe, extremely simple and lightweight messaging protocol, designed for constrained devices and low-bandwidth, high-latency, or unreliable networks. The design principles are to minimize network bandwidth and device resource requirements whilst also attempting to ensure reliability and some degree of assurance of delivery. These principles also turn out to make the protocol ideal of the emerging “machine-to-machine” (M2M) or “Internet of Things” world of connected devices, and for mobile applications where bandwidth and battery power are at a premium.
ADAFRUIT.IO CONFIGURATION
Adafruit.io is a cloud service - that just means we run it for you and you don't have to manage it. You can connect to it over the Internet.
- Display your data in real-time, online
- Make your project internet-connected: Control motors, read sensor data, and more!
- Connect projects to web services like Twitter, RSS feeds, weather services, etc.
- Connect your project to other internet-enabled devices
- The best part? All of the above is do-able for free with Adafruit IO
IFTTT CONFIGURATION
IFTTT derives its name from the programming conditional statement “if this, then that.” What the company provides is a software platform that connects apps, devices, and services from different developers in order to trigger one or more automation involving those apps, devices, and services.
Here are just three if this, then that automation you can run with IFTTT:
* If you make a call on your Android phone, then a log of that call is added to a Google spreadsheet.
* If you add a new task to your Amazon Alexa to-dos, then it will be added to your iOS Reminders app.
* If the International Space Station passes over your house, then you'll get a smartphone notification about it. (Yes, this is an actual IFTTT applet.)
Result










{kind=link}
{kind=link}
Comments