


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
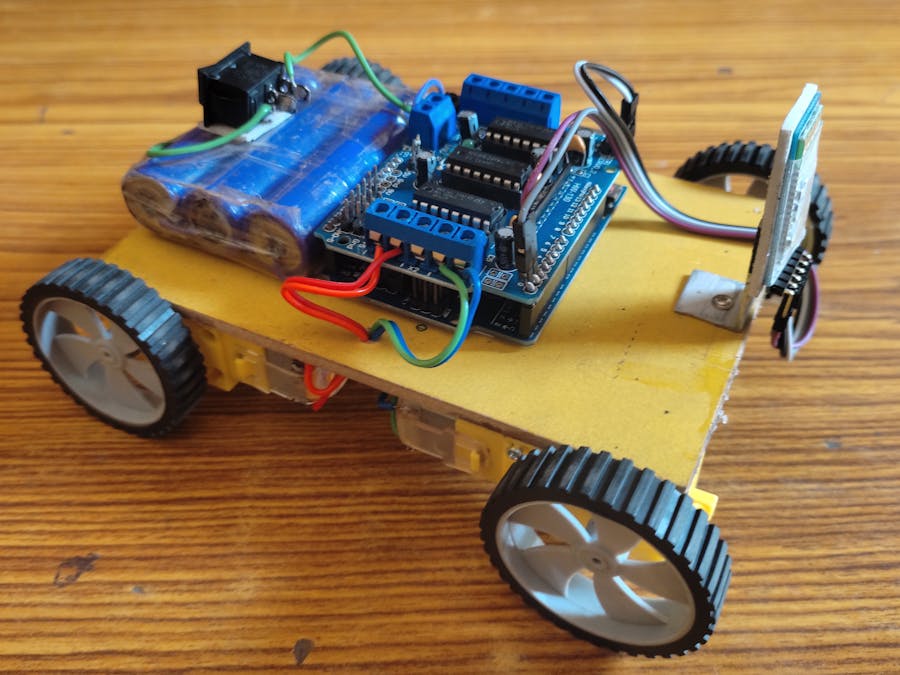
In this project we are going to make a Bluetooth Controlled Robot Car with Arduino. Although remote controlled robots(Car) that are available in the market are controlled by an RF remote, But this is the time of android phones. So I decided to make a wireless controlled Robot Car with arduino. To control this robot car we do not require any kind of RF remote, This car can be controlled by any one that uses android phone. So let's make this awesome project.
Hardware list required for this project:
- Arduino UNO
- Adafruit Motor Shield
- 4-Gear Motors
- 4-Wheels
- HC-05 Bluetooth Module
- 3-Li-ion Batteries
- Switch
- Jumper wires (female to female)
- Ribbon Wire
- MDF Board
- USB cable (that arduino Uno supports)
- Fevicol (glue)
- Double Sided Tape
- an Aluminum L-shaped strip with an screw
After collecting all the hardware listed above, follow the given steps for making the system.
Step-1:
In step first, we cut the MDF board to get an rectangular sheet of MDF with area(15cm X 10cm). After this, we drill two holes on this sheet to pass the wires from lower side to upper side.
Step-2:
In step 2, we cut 8, 5cm long wires from Ribbon wire cable and solder these wires to the terminals of gear motors.
Step-3:
In step 3, we join the MDF sheet and and gear motors together permanently with Glue or Fevicol. we can take the help of given image to know how to join the motors and sheet together.
Step-4:
In step 4, we fix the Adafruit motor shield on the Arduino Uno as shown in the given picture.
Step-5:
In step 5, we fix the Arduino and Adafruit motor shield on the chassis with the help of double sided tape as shown in the given image.
Step-6:
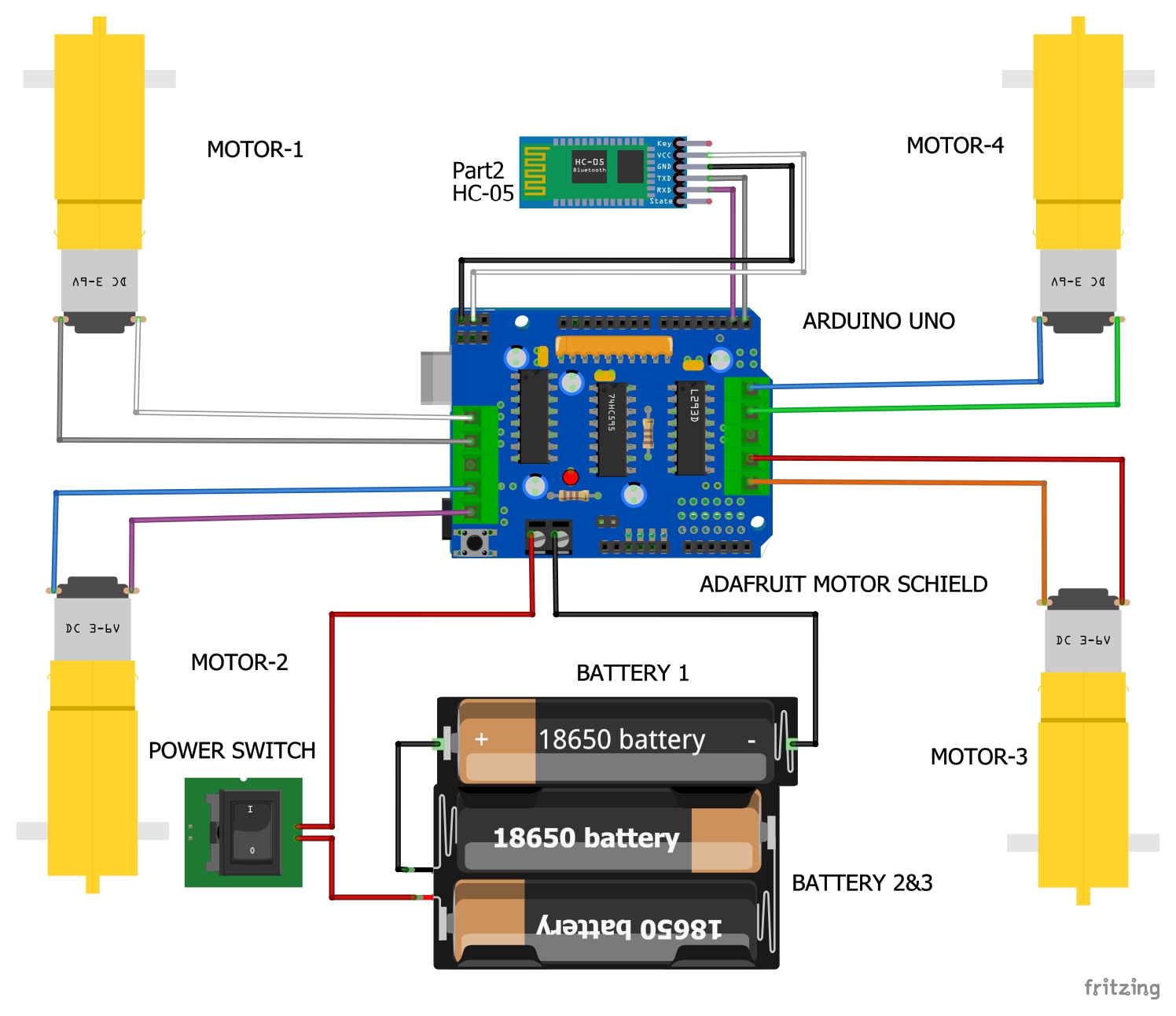
In step 6, we connect the wires of the gear motors to Adafruit motor shield. For this we also need an screw driver to rotate the screws of the terminal blocks. you can take the help of circuit diagram or the given images to make proper connections between gear motors and motor shield.
Step-7:
In step 7, we fix the Battery pack on the Chassis with the help of double sided tape. we also solder the +Ve wire of the battery pack to one of the terminal of the on-off switch and take another piece of wire and solder its one end with the second remaining terminal of the switch and another end is connected the +Ve supply pin of the Motor shield.
further connect the -Ve wire of the battery pack to the -ve supply terminal of the motor shield. As shown in the given image.
Step-8:
In step 8, we fix the L-shaped Aluminum on the chassis with the help of an screw and screw driver. After this , we attach our HC-05 Bluetooth module to it with the help of double sided tape. We also connect the HC-05 board with motor shield using jumper wires as shown.
Step-9:
In step 9, we connects the 4 wheels to the shafts of the gear motors as shown in the image.
Step-10:
In this last step, we have to program the arduino Uno board with Arduino IDE so we connect our robot car to laptop or computer with an USB cable. Before uploading the sketch on the Uno board, we remove the two jumper wires that is connected to the TX. and RX. pin of the arduino Uno. It is necessary, otherwise our arduino IDE gives us a programming error message. After successfully uploading the ketch, again connect the two wires(that we have removed) on their places. Now our Bluetooth car is ready to test and the only thing that is remained is to install the Bluetooth Car app in our android phone from the play store. After installing the app on your android phone, switch on the power button of your robot car and turn on the Bluetooth of your android phone and pair it with the Bluetooth of our Car and after pairing with the Bluetooth now Everything is ready.
Now control your car with your android phone and enjoy it.
Pictures of my work:
Thank You!
Author- Ramji Patel




{kind=link}
Comments
Please log in or sign up to comment.