

Hardware components | ||||||
| × | 3 | ||||
 |
| × | 2 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 10 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
| ||||||
 |
| |||||
Introduction
Nowadays, all the companies of the world are facing new challenges according to the quality of the services and products that they offer, the question that all are asked is how to offer a quality product, that is profitable and of low price, for this, the companies use cyclical and inefficient service surveys with mobile equipment, which they give to the clients to know the perception of the service. This currently, no longer shows an interest of customers to participate, because they feel tedious, lost time and outdated.
Given this, a prototype interactive robot was developed. MARKUS aims to evaluate and record the perceptions of the services of any company or business in an interactive and attractive way with the clients of the companies, turning service times into moments of joy and satisfaction, with the mission that the client is first and that he returns soon.
Markus has an open, modular and connective platform, which allows it to adapt at low cost to the requirements of organizations.
Cost per device, security, scalability and reliability
The manufacturing cost of the Markus robot was $ 150, since it was built with very low cost recycled materials such as MDF, PVC, fiberglass, etc. The design and construction were made by hand with a maximum time of 10 days.
Markus is a reliable and safe product for companies since its "data" software architecture is in the cloud (UBIDOTS) which allows it to offer and guarantee that the registered information is not modified or altered. It can also be said that, being a modular product and easy to transport, companies have the opportunity to choose any database that companies want.
Markus has the possibility to register and control the responses of each client and to record the information of their results in any company in the world, since their control panels are customizable according to the requirements of each company.
Markus has the advantage of being scalable and connective remotely to provide a solution with quality and promptness for it has online message tools in the cloud and with phone calls. Each Markus is registered independently in the database in the cloud as well as each one is assigned its own control panel with its assigned permissions.
In accordance with the goals for sustainable development made by the UN, Markus contributes and collaborates with the following:
For the value proposition that Markus added to the companies, it will allow them to assure their clients and stand out from the competition of the services they offer, making the service experience unforgettable and soon to return.
9. Industry, innovation and infrastructureMarkus is a very low cost technological proposal with recyclable material, offering companies a modular, scalable and transportable solution to be implemented in the mission and vision of organizations.
12. Responsible and productionMarkus is a crucial and strategic element within the organization that allows to interact effectively and with quality control (KPI) which alerts organizations when their products or processes are marked by bad service, MARKUS informs them via mobile devices in real time.
The robot Markus is a strategic value proposition and low cost, which will allow all the companies of the world, small, medium and large to have a new concept of innovation in the field of service robotics helping companies to reach your economic goals and insuring your clients.
Here is a video of the robot (Spanish version):
Fabrication processMold design
For the design of the molds are used squared rotation sheets of the big picture, the design is met by hand with measures 30 cm x 57 cm x 30 cm for the structure of the robot:
All the molds of the robot:
Development of the structure by fiberglass
For the fiberglass application, the following components were purchased: crystalline resin (model: PP-70), catalyst (model: K2000), to activate the resin, 1Kg of glass fiber and 2-inch brush for the application, in the images the mentioned components are shown.
Before starting the fiberglass application process, it is recommended to wear gloves, long shirt or gown, mask and safety glasses.
For the preparation and application of the mixture the following steps were followed:
Step 1. For each 100ml of resin, 2% catalyst must be applied, that is, 40 drops.
Step 2. Stir the mixture for about a minute.
Step 3. Apply a layer of the mixture with resin with the brush on the molds.
Step 4. The pieces of fiberglass are placed to the measure of the molds and pressure is applied on the fiber so that it adheres to the molds.
Step 5. Wet the brush with the resin and apply it on the fiberglass, making quick strokes from top to bottom until it covers the surface; noting that the fiberglass is covered in its entirety.
Step 6. Let it dry for 4 to 6 hours, preferably indoors and in a ventilated area.
Step 7. Once the resin is dried in all the molds, # 80 sandpaper is applied to eliminate imperfections.
Step 8. To close the pores and obtain a smooth finish in the fiberglass of all the molds, a paste called policar will be applied; which is obtained by mixing 100ml of paste with 2% catalyst and with an application time of 15 min.
Step 9. Let it dry for 2 to 3 hours, in a covered and ventilated area.
Step 10. Re-sand with the sandpaper # 80 the surface of the molds, then apply the sandpaper 180, back the sandpaper # 320 until you get a smooth surface and free of imperfections.
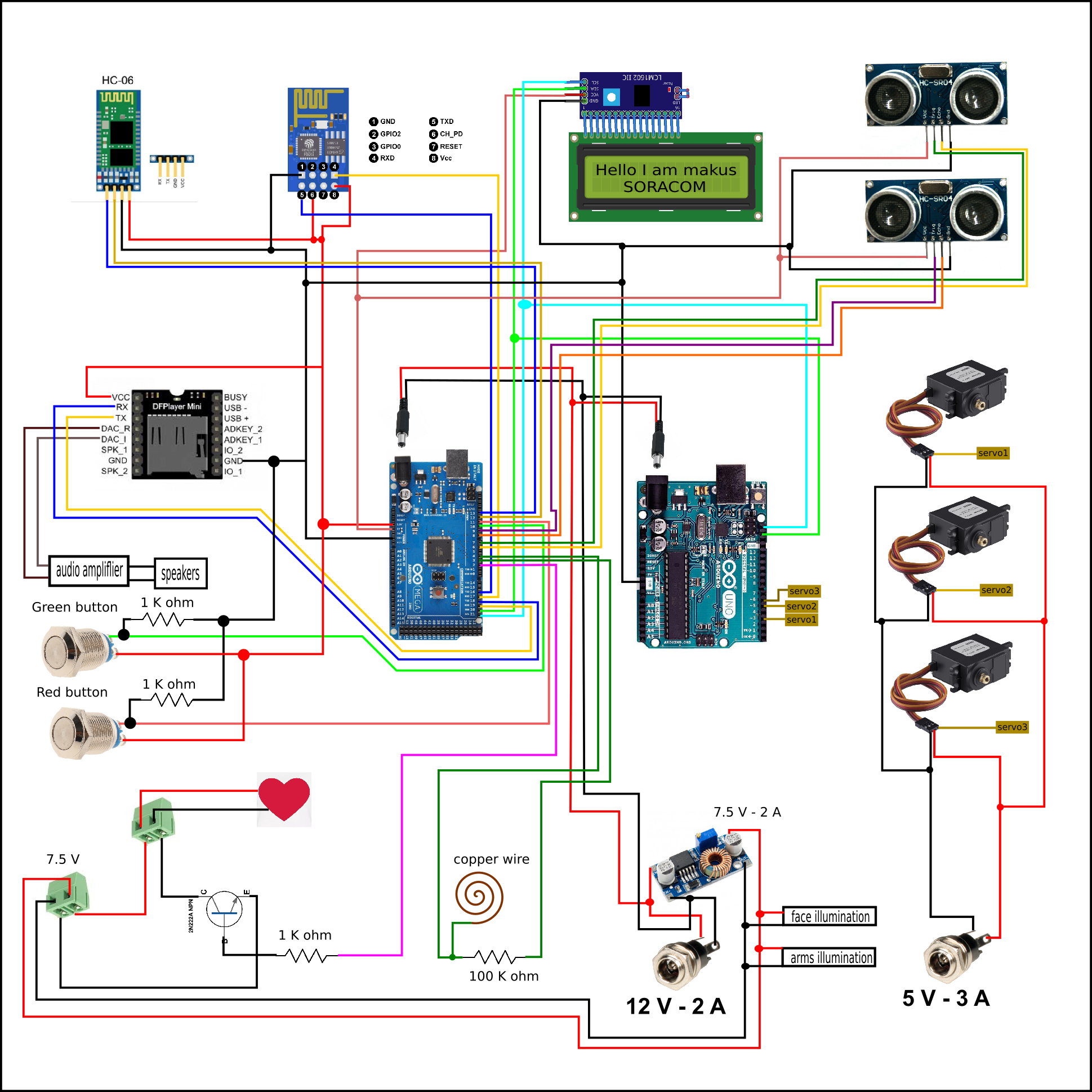
Development of interactive buttonsWe used 2 metallic button push buttons, which have green and red lighting. The button system will be used to choose an answer to the question that the MARKUS robot makes; The evaluation of the question can be positive or negative.
For the multimedia reproduction of the questions for the evaluation of the service and reproduction of different messages that the robot will have, the DFPlayer mini module was used, with which through a microSD card or a USB it reproduces audio tracks in MP3 or WAV format
I developed an APP for mobile phones with S.O. Android, the application is connected by Bluetooth to the robot and with it you can give basic commands, such as: say hello, say goodbye, etc.
here is a link to download the APK
https://www.dropbox.com/s/h1tpwfr9fql4rm8/Robot_MARKUS.apk?dl=0
Development of capacitive sensors for physical interactionMetallic adaptations will be made at the tip of the arms of the robot, so that when the robot is greeting the customer and the customer answers the greeting, a voltage variation is sent and a specific action is carried out afterwards.
A mechanical adaptation was made for the movement of the arms using 1 and 2 inch PVC pipes, which were assembled one on top of the other with their respective coupling, adapting it to the servo rotor.
And this is final result:
Configuration and personalization of the database in the cloud and communication is SORACOM.
The database was used in the cloud called UBIDOTS, which allows the real-time recording of the evaluation and perception of the services to be evaluated, synchronized with the interactive button system and the multimedia system.
the control panel that was used to display the positive and negative results of each question configured in the robot is attached
now here the SORACOM board will be shown where we can see all the information about the SIM CARD as the name the location and the connection status.
To connect our SORACOM card with the MARKUS robot, the following steps should be followed:
Step 1. Install the drivers. (Link: https://developers.soracom.io/en/start/iot-starter-kit/basic)
Step 2. Connect our SIM CARD to the computer through the USB port.
Step 3. Wait for the computer to recognize the device and assign it a network connection.
Step 4. In Windows, go to the configuration section, then to the internet and network and finally to the area with mobile wireless coverage.
Step 5. You select the network to which the SIM CARD is connected and you activate it.
The UBIDOTS cloud database is programmed to alert perceptions of poor service; These alerts will be communicated by means ofmobile messaging (telegram) or email to personnel or areas responsible for customer service and telephone calls inetrnacionales and in any language.
IF YOU HAVE ANY DOUBT ABOUT IT, PLEASE SEND ME AN EMAIL: WICHOMW3@HOTMAIL.COM
LibrariesWe just neede to add the libraries for the I2C communication, FDPlayer and capacitive sensor with the display so here it is the link to download.
Liquid Crystal I2C
https://www.dropbox.com/s/jkgmu8hgvvtdukp/LiquidCrystal_I2C-master.rar?dl=0
FDPlayer
https://www.arduinolibraries.info/libraries/df-player-mini-mp3-by-makuna
Capacitive sensor









{kind=link}
Comments