


Hardware components | ||||||
| × | 2 | ||||
| × | 6 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Electric motors have been around since the end of the 19th century. Once hailed as a major technological change, more significant than rise of the steam engine, electric motors have not fundamentally changed since the time of their creation. Modern day alternating and direct current motors have become more efficient and sophisticated, but the core technology is unchanged and will remain until a new technology is discovered to surpass current motor efficiencies.
While electric motor technology is well understood and widely used, there is an emergence of "makers" who are developing prototype motors that can be mostly 3D printed. One such example is the 600 watt motor designed by Cristoph Laimer, where the rotor and stator are 3D printed while the coil windings, magnets, bearings and shafting are non 3D printed parts.
How is this possible you may ask? Because a motor is not a complicated mess of wires and electronics, but is simply a device that creates magnetic fields to act on other, fixed, internal magnetic fields. With the understanding that these magnetic fields are supposed to act against each other to generate rotational motion, the package we place the coils and magnets in can be morphed to suit different purposes. Lets take a deeper look into how electric motors work!
Background and Theory:Inductance and Magnetic Fields
Electric motors use magnetic fields to turn electrical energy into mechanical energy. Electromagnetic coils, also known as inductors, are created by taking long enamel coated wire and lapping the wire layer by layer in a circular pattern. When an electromagnetic coil is induced with a current clockwise to the direction of the wound wire, a north facing pole is observed in the plane facing into your screen. Conversely, when a counterclockwise current is induced in the coil, a north facing pole will be observed pointing away from the screen.
By changing the direction of current in the wire, a north or south facing pole can be induced in the same coil at different moments. Magnetic fields can also be created using magnets, which generate a constant magnetic flux.
Flux is defined as the “flow of current through a magnetic field” and describes the rate of flow of the property over a unit area. The magnitude of magnetic flux that flows through a conductor will determine the amount of force the coil will exert on another magnetic field, and whether it’s an attractive or repulsive force. With this principle, motors can be developed to maximize magnetic flux by maximizing the amount of coil area that will influence the magnetic field of the rotating machine.
Components Integral to Electric Motors
An electric motor will have at least one stator and one rotor depending on the design and type of motor. The stator is a fixed ring of electromagnetic coils that act on the rotor, which is the rotating part of the machine. The rotor will employ electromagnetic coils or magnets to generate a magnetic field that will be propelled by the external magnetic forces provided by the stator. This magnetic push and pull is possible through the idea of the rotating magnetic field, a principle in which either the stator or rotor has a fixed magnetic field and is acted on through induced alternating currents in the coils of the other part.
The rotating magnetic field would not be possible without a device to switch the direction of current through the coils to create a magnetic field pole optimal for propelling the rotor against the fixed magnetic field on the stator. This process of selecting current flow is called commutation and can be done through a commutator, as in the case of controlling an induction machine or brushed machine, or through a motor controller, in the case of a brushless machine.
Electric motors will generally fit in to two main categories, alternating current and direct current. Alternating current motors use the back and forth nature of AC power to constantly change the direction of the magnetic field, which acts like the commutator described above. Direct current motors use direct current to power the motor windings, but this can be done in brushless and brushed methods.
Brushed Machines
Brushed machines employ two sets of electromagnetic coils, one set on the rotor and one on the stator. The stator coils will generate a strong, fixed magnetic field that alternates the magnetic field polarity in the radial direction so to create a ring of alternating north and south fields evenly spaced side by side. The rotor coils are wound so the active copper area is parallel with the rotating shaft of the machine and are spaced to generate a magnetic field to complement the fixed field of the stator.
With the ends of the rotor coils soldered onto a brush gear, carbon brushes can contact the face of the sectioned brush gear, allowing a current flow through the windings that are repelled by the surrounding magnetic field of the stator. This forces the rotor to rotate which causes the brushes to contact a new section of brush gear, inducing a magnetic field of the same direction into the new coil section of the rotor. Commutation in this way is reliable and will always create a magnetic field in the rotor windings to maximize the force propelling the rotor radially.
Brushless Machines
Brushless machines use a rotor with a fixed magnetic field, generated through powerful magnets, of alternating north and south poles like the stator of the brushed machine. The stator of the brushless machine has coils fixed along the edge of the stator ring, but these coils have no fixed polarity. An external electronic device commutates the motor by sensing the polarity of the fixed magnets at the specific rotor position, then allowing current flow through the coils in a specific direction to maximize the force of the stator coils on the rotor magnets. This commutation method has 6 possible directions of current flow through 3 phases of coils distributed across the whole of the stator.
In the case of brushless alternating current motors, a sinusoidal current flows through the windings, using all three phases simultaneously. Brushless direct current motors use a square wave current to flow between two phases of the stator coils, making 1/3 of the coils a positive current flow and 1/3 a negative flow.
As seen in the above picture, if the MOSFET gates at Q1 and Q2 were open so current could flow, the current would flow throw the A and B phase of the coil windings. The flow of current largely depends on how the motor is wound and the winding pattern chosen by the motor designer discussed in a later part of this section. Brushless AC motors produce more torque at higher speeds than brushless DC motors, but DC motors are less expensive to produce and draw more current.
While brushless motors require complicated control circuitry to perform commutation of the stator and are more expensive to build due to prohibitive magnet costs, brushless motors are better equipped for tasks where space and weight limitations make brushed motors less ideal and efficient. Brushless motors will employ magnets with a high-power density in the rotor, rather than coils, making a stronger magnetic field possible in a smaller area than can be achieved with coils. Brushless motors are therefore much better suited for application that use less than 10 kilowatts of power, rather than induction or brushed motors.
Higher efficiencies and greater power outputs of 20-50% can also be observed in brushless motors under the 10kw threshold as they have a higher toque to current ratio. This can be explained by a larger amount of stator space, allowing for more windings to be added to the coils overall, yielding electromagnets with a higher power density that generate more torque. Brushless machines can be made more compact than induction or brushed motors because the shaft does not need to accommodate a spur gear and large rotor windings. For these reasons brushless direct current motors are superior to brushed and induction motors for electric vehicle operation and will be the type of motor chosen for the project.
Axial flux vs Radial flux
A brushless motor with radial magnetic flux is known as a radial brushless motor. Radial machines make up most brushless machines commercially available because of their ease of manufacture. Common applications for these motors are quadcopters and hobby drones because of their small size and decent torque at high RPMs. A radial motor can be of the in-runner, rotor is fit inside the stator, or out-runner, rotor is outside of the stator, type when designed. In either of these designs, the magnetic radial forces between the rotor and stator are balanced along the circumference of the rotor.
These motors will have an airgap, air cavity between the difference of the rotor and stator, that allows the machine to spin freely without the rotor or stator colliding. The smaller this airgap difference, the more torque is generated because of the increased magnetic field strength. While being an efficient design, if more torque is desire from the motor the airgap along the shaft must be increased, meaning longer coils and magnets are required to do more work. For this reason, the machine is not as flexible to work with as its axial counterpart.
A brushless motor with axial magnetic flux is known as an axial brushless motor, also known as a “pancake” motor. Axial machines have a coil and magnet arrangement perpendicular to the shaft direction. Torque is proportional to the cube of the diameter, so the more distance there is between the coil and magnet arrangement from the center of the shaft will yield a machine with a higher moment arm, creating more torque for the overall machine. This also has the dual benefit of providing more circumference distance the farther away from the center of the machine. As a result, more coils and magnets can be fit into the machine without increasing the width of the machine.
Like the radial machine, the axial machine can have multiple configurations that include a 2 stator 1 rotor or 2 rotor 1 stator design. Unlike radial machines, axial machines can have stacked rotor and stator assemblies added onto the machine, so an arrangement of rotor-stator-rotor-stator-rotor is possible. This type of arrangement will yield a machine with almost double the torque output as a rotor-stator-rotor setup as there are more magnets and coils doing productive work in rotating the machine.
While the axial machine is the most efficient type of motor with the highest power density, they are difficult to manufacture on a large scale and can be significantly more expensive than radial machines because of the relatively large number of magnets needed for the rotor assembly. Overlooking the high costs and assembly difficulties, the Axial flux motor is optimal for electric vehicles and can be designed to directly attach to the wheel or be fit inside the wheel, meaning no additional gearboxes or transmission equipment is necessary.
Motor Windings
All brushless motors are wound with coils that orient a specific direction. For 3 phase machines, x number of coils will span a combined 120 degrees of the stator face, meaning there will be an equal number of coils in each phase of the motor. If there are 24 coils in a motor winding, there are 8 coils per phase and 24 slots equally spaced along the stator face that every coil is fit into (one coil every 15 degrees).
For non-overlapping coil designs, individual coils are placed side by side along the stator face. Because the coils are small in size and have short end windings and the top and bottom of the coil concentric to the stator disc, there is a reduced copper mass and reduced coil losses, yielding a more efficient machine. A single layer non-overlapping design employs half as many coils as stator slot positions. This yields a winding pattern with more turns per coil which creates a stronger, more concentrated field around the coil. A double non-overlapping design has a coil seated in every slot with an equal number of turns in every coil. Each of these coils take up equally as much space and allow equal magnetic flux flow across the whole face of the machine.
Overlapping coil designs use larger coils that span multiple slots. The larger coils are then stacked so the end turns of the coils overlap, and the active copper area, the part of the winding aligned radially with the shaft, are deformed to be in the same plane. The geometry of overlapping coils is not constant, so design and manufacture of theses coils can be harder and more costly. An advantage of overlapping coils, when designed properly, include less end windings than non-overlapping coils.
The arrangement shown above is known as a wave winding, a winding that goes back and forth from the outer edge of the stator slot to the inner edge of the slot. While providing almost double the active copper regions, this arrangement adds more wire length to a coil, causing a higher resistance and limiting the current that can flow through the winding.
Cored and Coreless Rotors and Stators
A motor core is a piece of iron or steel used to enhance the direction of magnetic field within the stator or rotor. A cored design will use steel laminate sheeting to create a stator or a circular disc of iron to form the back-iron of the rotor. A coreless design uses non-ferromagnetic material in construction the rotor and stator. Brushless machines can be both cored and coreless having a cored rotor with a coreless stator or coreless rotor with cored stator.
In cored designs, steel laminate sheets are laid on top of each other to form a stator and an iron ring is used for the rotor. The steel laminate sheets reduce eddy currents in the copper windings as well as focusing the magnetic flux of the coil through the slot, creating a stronger magnetic field in the airgap of the machine. With a cored stator, there will be coil losses due to eddy currents and there will be an attractive force between the magnets and steel core, referred to as cogging, causing the machine to have an inconsistent airgap and unneeded stress in the axial direction. The iron ring of the rotor will have magnets affixed to it, allowing magnetic flux to flow through the iron ring to other magnets, increasing the overall field strength of the magnets.
In axial designs with multiple rotor and stator layers, cored rotors are only necessary on the two outermost rotors. With an iron rotor ring there is a larger moment of inertia due to the mass of the ring and the far distance from center shaft of the machine. Because of the copper losses, attractive nature of magnets to cores (cogging), and added weight/momentum to the system, cored machines can be lower in efficiency than their coreless counterparts.
Coreless designs employ rotors and stators made of non-ferromagnetic materials such as plastics and carbon fiber. Because there are no metal pieces, there are no cogging forces or eddy current losses, increasing the overall efficiency of the design. Without the stator core, the magnetic flux will not be very concentrated so the coil flux density will be lessened across the stator. This yields a lower power output and more magnet material is necessary to do the same work and increase the flux density of the machine. While less torque will be produced from a coreless stator, the weight of the stator can be significantly reduced and the coil efficiency can be increased to have almost no losses.
The 3D Printed Motor :The construction of axial flux motors in an industrial setting will be composed of ferrous parts. This is because of the strong material properties of metals as well as the flux linkage between magnets and between coils increasing overall field density across the airgap. Configurations that do not use ferrous materials are not as plentiful in industry, but they do have increased efficiency with less wasted power. A configuration in which non-ferrous materials are used in conjunction with ferrous materials will be the focus of this project, as it provides for the highest efficiency among 3D printed motor stators and rotors.
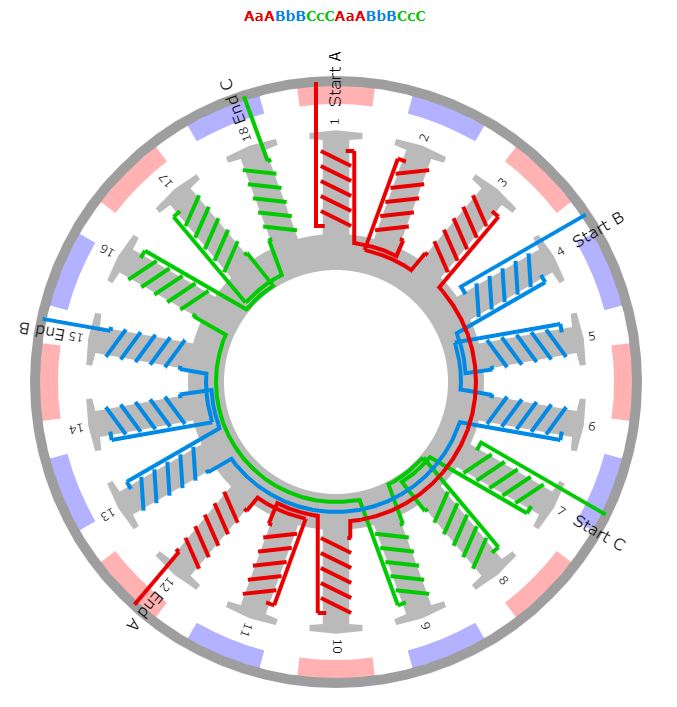
The test machine was designed to use 2 stators on either side of 1 rotor disk. The machine consists of 18 coils, 6 per phase, with 1000 turns per phase. The rotor consists of 64 neodymium magnets with 2 magnets stacked on each face of the rotor, forming a magnet pole of 4 magnets. Of those 64 magnets, half are grade 52 and half are grade 42. To maintain a consistency between the magnetic fields of each rotor pole, a grade 52 magnet is placed on the rotor face with a grade 42 magnet facing the stator teeth. The winding pattern of the machine is also kept consistent between the configurations and follows an AaABbBCcCAaABbBCcC pattern that terminates in a Y formation.
Machine characteristics that are important to motor operation include a constant airgap of 1.75mm as well as the stator tooth top face being only.8mm thick. Another important characteristic of the design were the magnet covers used on the rotor configuration substrate to keep magnets aligned with the center of the stator teeth. Even if forces act on the magnets radially, from tangential forces due to the rotor speed, or axially, from the stator fields, the magnets will maintain equal spacing across the rotor.
For the purpose of testing the machine characteristics, one stator face will be left off, as a second stator face is not necessary to determine whether one configuration is preferable over the others. The machine will be less powerful than the original design, but the torque achieved from the second rotor would be almost double the torque produced by a single stator and therefore is unnecessary.
Actual motor configuration
This configuration has the advantages of a cored rotor’s stronger magnetic field as well as the high efficiencies of the coreless stator teeth. A cored stator and coreless rotor configuration will not be explored as cored stator losses combined with weaker magnetic fields, resulting from a coreless rotor, would produce a comparably low efficiency machine configuration.
Electrical and Mechanical Properties
The stator of the mixed configuration is composed of coreless stator teeth. These have the benefits of a coreless machine, having no cogging forces (resistance to change position due to magnet, stator teeth attraction) on the rotor as well as no eddy currents or hysteresis coil losses (due to no ferrous material in stator teeth). The rotor is composed of a ferromagnetic core, so the rotor causes an increase in the magnetic flux density across the airgap of the machine.
While the magnetic fields generated by the electromagnets in the stator will be weaker than that of a cored stator, the increase in airgap flux caused by the rotor core will yield a higher airgap flux than a fully coreless machine. This will yield a stronger push and pull of the rotor because a higher airgap flux will always produce more torque.
So, a coreless stator combined with a cored rotor will yield a machine with a high efficiency as well as a stronger torque than a purely coreless or cored design. The machine will have added weight from the cored rotor, but this can be negligible due to the small overall increase in mass that the core adds to the machine as well as the stronger attractive and repulsive forces seen across the machine airgap.
Costs and Construction
To print all of the pieces necessary for the motor assembly, approximately 1.63 Kg of PLA plastic would be used over 175.5 hours of printing. The rotor assembly required the cutting of two discs from 16-gauge sheet metal, the mounting of the center hub, and the installation of magnet alignment parts as well as the magnets. This part was fully manufactured after 3.5 hours of labor. Overall, the machine costs $223 and would take 175.5 hours of printing with around 7 hours of labor needed to assemble the machine.
To assemble the machine, the bottom and top plate of the motor stator needs to be created. Assemble 3 stator base pieces in a circle, then fix wedge pieces into the wedge gaps with glue. Do this twice, so we have a top and a bottom plate. Let these assemblies cure fully before moving onto the next part.
Next, fix the bearing holder piece to the center of the plates. Secure this item with M3 screws by placing the bolt head through the bearing holder. Then insert the bearing into the bearing holder. Now our top and bottom plate assemblies are complete.
The next part of the process is to wind the stator teeth. Begin by winding the magnet wire in a clockwise rotation around the stator tooth. Wind the tooth to the desired turn count, then set the tooth aside to wind another. After all 18 teeth are wound, the teeth can be inserted into the slots on either the top or bottom plate assembly. Secure these teeth using glue.
To assemble the rotor, cut out an 11.5 inch diameter circle from a sheet of steel stock (use 2 pieces back to back if using a light gauge sheet metal). Cut out a 2in center hole, then fix the shaft hub in place, as centered as possible, on both sides using 3mm hardware. To attach the magnet holders, assemble the pieces along the rotor edge then glue the pieces to the base of the sheet metal. Glue here just prevents the magnet holders from shifting, the magnets will fix themselves to the steel disc. Once the rotor magnet holders have cured in place on both sides, place the magnets into the machine so that they alternate polarity between magnets. Place two magnets in the same magnet holder, then place two magnets in the same location on the face of the rotor. Finally, place the shaft through the holes of the shaft hub, and tighten the set screws on the shaft hub to fix the shaft in place.
To assemble the motor from sub assemblies, begin by placing the rotor into the bottom stator assembly. Sandwich the rotor by placing the top stator assembly on the rotor shaft. Then, use 3mm standoff posts, 2 x 3mm screw, a 3mm washer and a small spring to fix the plates together. This allows for easy assembly and disassembly of the machine, while leaving some wiggle room for errors in the printing/manufacturing process. Do this for the other 8 holes around the stator assemblies.
Winding Configuration
The motor should be wired according the the above configuration. Care must be taken to ensure the correct current direction throughout the coils, as reversing the current for a coil can lead to motor stalling. This means that if you start winding coil 1 counterclockwise, coil 2 must be clockwise, then coil 3 must be counterclockwise. When all the coils for each of the 3 phases are wired together, you can terminate the coils in a Y junction. This causes the power to flow through one phase of the coils, then go through the Y junction before entering another phase where the current meets electrical Ground.
Power and Control
To control this motor, a BLDC motor controller is required. To wire the machine to the controller, find the beginning of each coil phase (A, B, C) and wire them to the corresponding phases of the motor controller. Power the motor controller with a DC voltage (do not go past the maximum voltage for your controller) and start the motor using the control mechanisms provided by the controller. If the motor does not start, propels itself slightly without gaining momentum, or makes a ringing noise while the rotor is at a stop, you may have reversed the current direction of one or more coils. The motor, as it was designed, will start on its own without outside force needing to propel the rotor, so if you have to turn the rotor to start the motor then something is wrong with your machine.
Machine Results:A fractional dynamometer was used to measure the torque of the machine and a constant voltage source was used to power the machine. The power supply displays the amount of current drawn by the machine, so an accurate power rating can be assumed from the measurements observed. The dynamometer was placed on flat surface with its shaft parallel to the surface. The machine was then placed on its side, so the shaft was parallel with the flat surface, and a timing belt was placed on the pulleys of the dynamometer and the machine. The pulleys used have the same diameter, so the measurements obtained through the dynamometer are accurately measured.
The motor was powered at 30 V and allowed to speed up to max speed. The maximum speed achieved without load was 255 RPM, so the machine has a rpm/volt constant of 8.5. When maximum load was applied to the dynamometer, the motor drew 0.648 A and produced 0.29 Nm of torque. A speed of 150 RPM was achieved under load. After calculating for wattage, this motor produces 4.555 watts of power. The efficiency was then calculated to be 23.43%. The total resistance of a phase of the machine, 6 coils terminating in a Y pattern, averaged 11.5 Ω. The copper losses were calculated to be 9.657 watts when under load.
Thermal Considerations
This machine has a maximum operating temperature of around 65 degrees Celsius. A temperature of 65 degrees will still cause the stator teeth to plasticize and could become skew from pointing in an axial direction. There is currently no way to avoid this while using PLA plastic, ideally ABS, Nylon or PETG filaments would allow for hotter working environments or longer motor run time before the stator teeth plasticize.
3D printing axial flux motors with a coreless stator and cored rotor is shown to be possible and usable in real world settings. Should the design be optimized, 3D printed motors could be a new possibility as technology develops throughout the future. Due to time constraints on the project, there was no optimization done on the machines to maximize field strength and reduce losses. Had the machine configurations been optimized, a higher torque as well as higher efficiencies would have been achieved. The small power output produced by these machines do not indicate 3D printed motors are unfeasible, but rather a complicated machine that needs more development and optimization to achieve competitive efficiencies seen in commercially available motors.
Design and implementation challenges are currently numerous as 3D printing limits the size of parts that can be created in a single print. The base of the test machine was printed in 6 separate pieces and glued together. Had a larger printer been used, the base could have been printed as one part and would be stiffer and more rigid. Also, 3D printing limits the materials that can be used to manufacture parts because fused deposition modeling requires plastics and materials with a low melting point when compared to materials like aluminum and iron. As technology progresses and newer materials are found with higher melting temperatures, the failure point of 3D printed motors will start to minimize as the materials hold up to heat generated by the stator coils within the machine.



{kind=link}
Comments
Please log in or sign up to comment.