


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
This is my final project for the BolT IoT training. The basic principle of the project is to use the bolt cloud server and to control the Arduino (car) with the help of API calls made by using the Android application, developed by using MIT App Inventer.
The App developed uses Bolts UART method to communicate with the arduino and send the instructions to perform the specific task.
The API call is made by using a web call function to give api calls using the bolt id and the unique API key obtained from the bolt cloud.
It can be operated from any distance, if the device is connected to internet and also the bolt device is connected to the wifi.
1 / 5 • Model
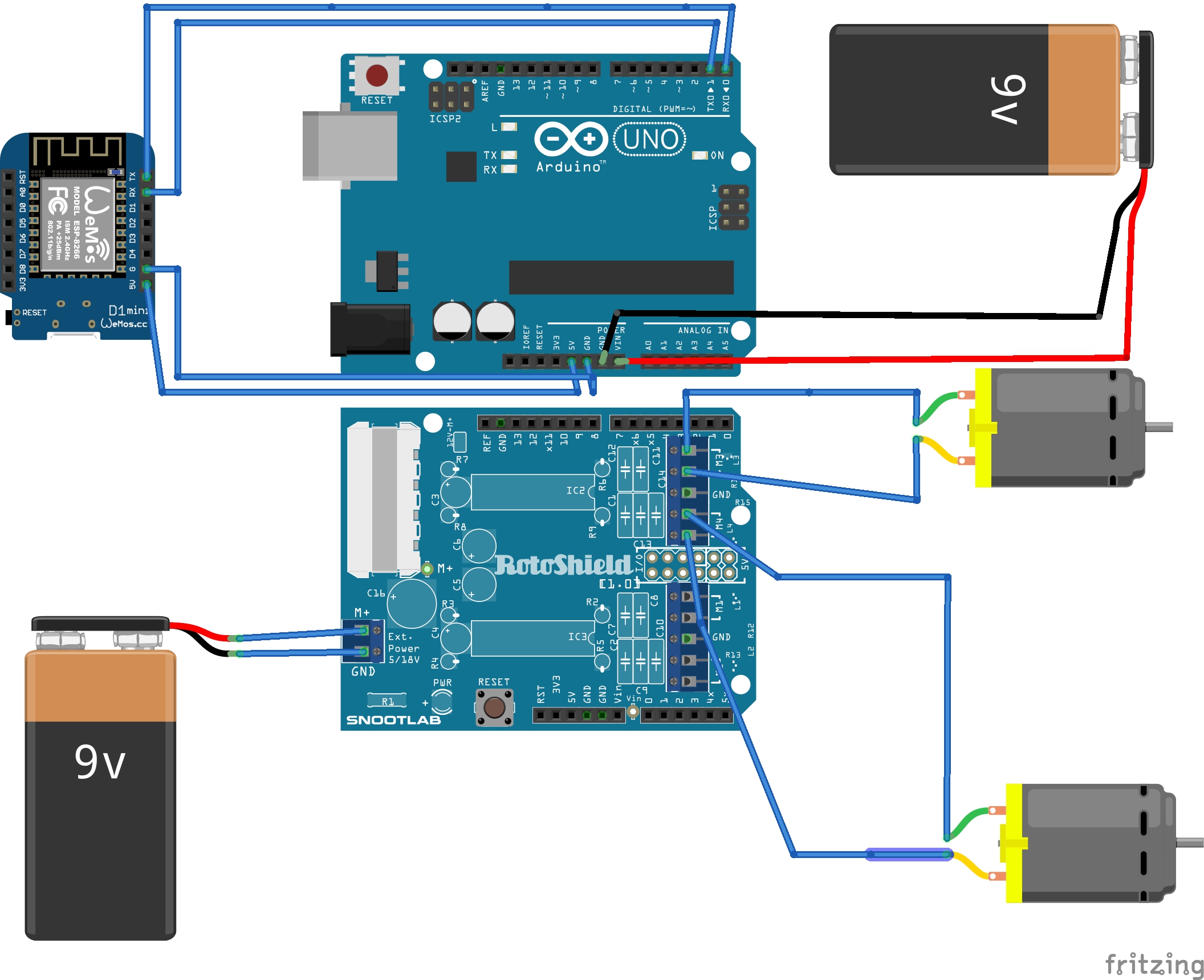
Schematics for the connection.
It is my first Schematic drawing and hence i was not able to draw it, as i had planned it or at-least thought to making it.
The few things to be noted are:
NOTE: The shield would sit on the ardunio.
The bolt Iot kit was used instead of the wifi module shown in the diagram.
Thank You.
The few things to be noted are:
NOTE: The shield would sit on the ardunio.
The bolt Iot kit was used instead of the wifi module shown in the diagram.
Thank You.





{kind=link}
Comments
Please log in or sign up to comment.