


Haze has been one of the biggest problems in South-East Asia for decades, affecting primarily Malaysia, Indonesia and Singapore. In Malaysia, air quality information regarding haze is usually collected by ground stations that’s been located nationwide by the authority. Although ground station provides accurate and reliable data, it cannot tracks the changes of air quality in area that is not covered by the stations especially in remote areas and during emergencies. During a pandemic lockdown, drones with suitable sensors will help the authority to monitor the situation in efficient and safe manners. The haze first became a considerable disruption to daily life in Malaysia since 1983. By the end of June 2020, satellite images have detected hotspots of fire in the South-East Asia region. A state of emergency due to the risk of forest fires has been declared in certain area. Thus, a cross-border haze into the country could set in by August or September if open burning is not brought under control. The use of drones especially with the current lockdown and the likelihood of haze in Malaysia should provide an interesting project until November 2020.
Things to buy and useThe hardware used for the air sensor is as follows:
1) Flying wing (AR Wing)
2) Quadcopter Drone (KIT-HGDRONEK66: NXP drone kit.)
3) MQ 135 Air Quality Sensor
4) DHT 11 Temperature Sensor
5) Arduino Nano
6) Nodemcu ESP8266 Wifi Module
7) Breadboard
8) Jumper wires
9) Smartphone
10) Butane Gas lighter
Software used
1) Arduino IDE
2) Blynk
3) Ardupilot
Things to doHere is to-do list of things that the team need to accomplish the goal:
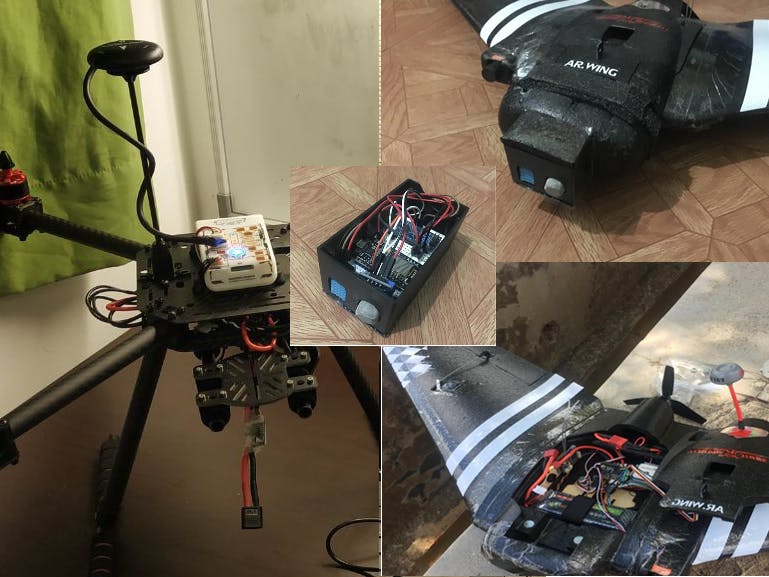
1. Drones: We have acquired a flying wing and a quadcopter for the task. The flying wing is the AR Wing while the quadcopter is the KIT-HGDRONEK66: NXP drone kit. The more drones the merrier the task will be 😂😂..
2. Sensors: We end up using the MQ-135 air quality sensor and a DHT 11 temperature sensor. It is cheap and easily integrated with the Arduino Nano used in the task.
3. Networking: NodeMCU Development board is suitable for wireless communication that can upload the data of the sensors passed from Arduino Microcontroller. It can be accessed remotely within the smartphone application
4. Smoke: The team need to test and analyze the data from the sensor. Since the quarantine due to pandemic, the law prohibited unauthorized flight and thus the team is forced to test the sensor on the ground.
Step 1: ConceptIn order to sense the air quality, the sensor need to be mounted on top of the drones. The design setup is developed by integrating the sensors with the microcontroller. Raw data from the sensors provides readings of the air quality, humidity and temperature. The data is displayed in the user smartphone or laptops by using Blynk application.
The AR Wing features a detachable main wing and wingtip structure. It spacious equipment bay makes it suitable for carrying the air quality sensor module. At the same time, a quadcopter drone is also assembled from the NXP drone kit. The quadcopter is targeted for air quality monitoring in static flight or vertical arrangement, while the AR Wing is targeted for a fast horizontal sensing.
Video for NXP Drone Kit Assembly :
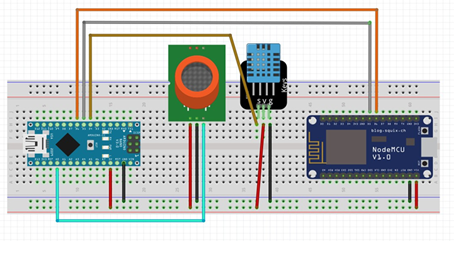
Below is the diagram of the sensor. The assembled sensor is used in the first test.
The air quality sensor is then placed on board the drone for the next test.
The AR Wing is tested for speed and agility, without the sensor. The figure shows the flight path of the drone. Unfortunately, just after the flight test a quarantine has started. At the same time we have some difficulty with the NXP Quadcopter Drone (malfunction motor). Nevertheless, we continue with the test at ground level.
Two tests have been conducted. The first test is to see the data transferred from the sensor to the smartphone using Blink IOT. The second test involves testing the air quality module onboard the drones. Unfortunately, only ground test has been conducted so far, using smoke from the smoke flare and fan. The first test involves reading of air quality when butane gas introduced to the sensor, as shown in the figure below.
The test shows an increase of reading of air quality in the smartphone blink apps.
The air quality sensor module is placed on the flying wing UAV platform and placed on a jack stand. The purpose of this is to test the detection of the presence of smoke by the sensors and the effects of wind to the reading of the air quality. The responding variable of this experiment is the reading of the air quality and the manipulated variable is the fan speed.
The team has developed a system to detect air pollution using drones. Arduino based sensors are used for the air quality module on board the drones. A flying wing (AR Wing) and a quadcopter (HGDRONEEK66) are chosen as the drones for the test.
The AR Wing has been tested for flight and it works perfectly. However, until the submission of the Hovergames2, the HGDRONEK66 is still grounded due to some technical problems.
The air quality module has been tested and working perfectly by transferring data to the smartphone via the Blynk IOT.
Nevertheless, all test had to be conducted on the ground due to technical difficulty and unforeseen extension of the quarantine in the country. At the same time, no haze is coming to Malaysia at this time 👌👌.
We would like to say thanks to the NXP for the KIT and Challenges. 🤣🤣. Looking forward for the next challenges.







{kind=link}
Comments
Please log in or sign up to comment.