






Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
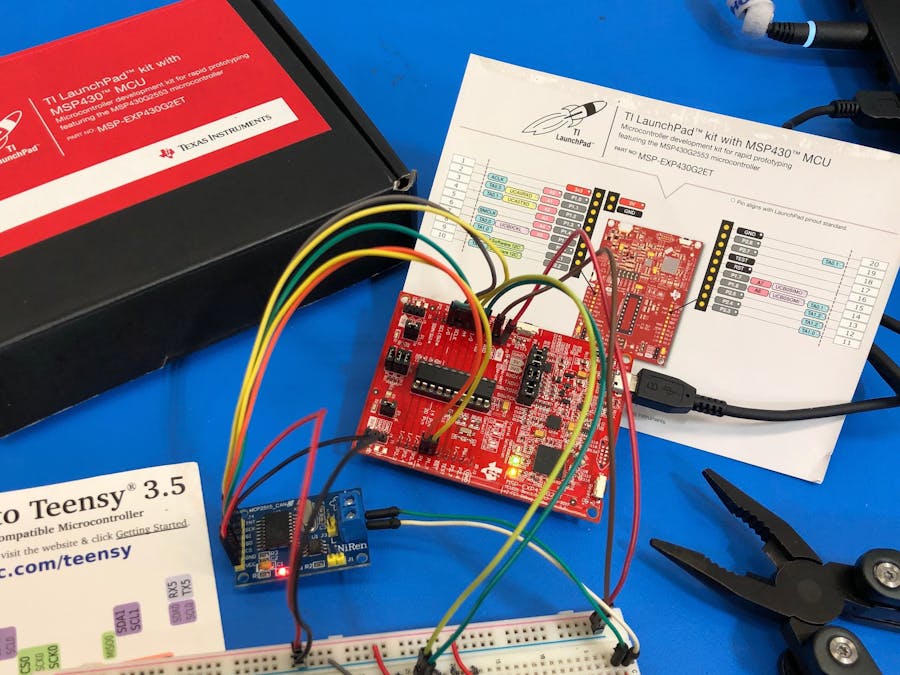
What is the DIM?The Driver Input Module (DIM) is a Texas Instruments MSP430-G2553 Microcontroller with the requirements of handling driver input of Lithium, UC Irvine’s 2019 FSAE Electric Racecar competing in Lincoln, Nebraska. The driver input sensors includes two independent Accelerator Pedal Position Sensors (APPS), one Brake System Encoder (BSE), and one Steering Angle Position Sensor (SAPS) and a drive button. These inputs are processed by the DIM then broadcasted to the Racecar's CAN-Bus (Controller Area Network) to interface with other control modules.
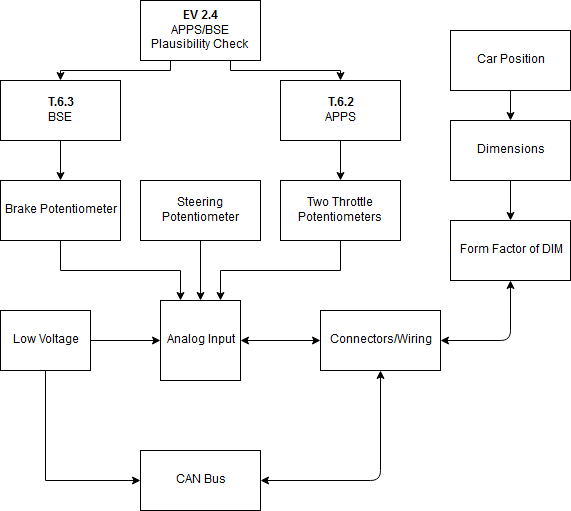
Context of the DIM:The figure below describes the context of the DIM. The driver input sensors (APPS, BSE, and SAPS) are analog potentiometers connected to the Analog-to-Digital Converter (ADC) of the DIM. The DIM utilizes this input data to check for faults in the system; if no faults occur, these values are transmitted to other control modules of the racecar via CAN. Since the MSP430 microcontroller has no native CAN support, a NiRen SPI-CAN controller is connected via Serial Peripheral Interface (SPI) to interface DIM to the Racecar's CAN-Bus.
Description of the Faults:“Faults” were previously mentioned and are critical to the design of the DIM for a tech-ready racecar. Faults can arise if the accelerator (depressed at >20%) and brake pedal are actuated at the same time, if a sensor is disconnected, or if either APPS sensors output different voltages. These faults are defined as a “plausibility” by the FSAE rulebook, and must be accounted for in our Failure Mode Effect Analysis (FMEA). If a plausibility occurs, the DIM will send throttle values of zero until the fault is cleared.
Why is DIM important?DIM has two important tasks: the first task is enable operation of the racecar after the tractive system is closed, and the second to detect faults to prevent the Racecar from transmitting incorrect pedal values for safe operation.
Working on the DIM provides hands-on experience with the Texas Instruments MSP430 series microcontroller and interfacing it with CAN Bus to integrate it in a safe racecar for UC Irvine. DIM has been in development since October 2018 quarter and will be integrated on our FSAE Electric Racecar for the 2019 season.
CurrentStatus: DIM is currently being mounted on our custom interface PCB and tested for our initial release, Version 1.0. The .Brd (EAGLE CAD) and Bill of Material files attached to this Project have gone through 8 internal revisions and are labeled "V1.8"; these internal revisions refer to our public release Version 1.0. We included the .Brd, .Schematic, and a Bill of Materials for advanced users to evaluate our integrated component. Intermediate users may refer to the breadboard diagrams.
The next version will not use the full LaunchPad and will be labeled Version2.0. This next version will use an interface board for the DIP packaging of the MSP430, MCP2515, and TJA1050 ICs.
A prospective Version3.0 will use a Texas Instruments CAN Controller and Transceiver.
April2019
*****************************************************************************************************FurtherReadings:
Sparkfun - Analog-to-Digital Conversion Introduction
https://learn.sparkfun.com/tutorials/analog-to-digital-conversion/all
CSS Electronics - Simple Intro to Controller Area Network Bus
https://www.csselectronics.com/screen/page/simple-intro-to-can-bus/language/en
Texas Instruments - Introduction to the Controller Area Network
http://www.ti.com/lit/an/sloa101b/sloa101b.pdf
Anteater Electric Racing - Simple Introduction to EAGLE CAD
https://drive.google.com/open?id=1jNvfpGzudJc0RT9-VRTbLf6C7m-Ko0kh
Anteater Electric Racing - Coupling Capacitor Explanation (for PCB)
https://drive.google.com/open?id=1bQqdNWBqOYyQLjGkDOjo-0sJ0xrkmafCE3i5SI-hUdg
*****************************************************************************************************Updates:
V0.2 - April 14, 2019:
*Moved this project to our Engineering Race Team account.
*Removed PWM timer for motor control as we use a different control module for this operation.
*Added CANbus functionality via SPI, to interface with other control modules of the vehicle (for Torque Vectoring and Data Logging).
V0.1 - February 2019
*Initial version with PWM output (Please ask for PWM files).
*Working ADC and UART for debug.*No working CANBus output.
*****************************************************************************************************To-DoList:
*Calibrate sensors for proper fault detection once integrated.
*Publish CAN protocol for implementation on any Racecar with electronic throttle.
VERSION 1.0 (current):
*Test CANBus broadcast on a CAN-Analyser tool.
*Test CANBus broadcast for other control modules.
*Mount DIM on interface PCB.*Test DIM on PCB.
VERSION 2.0:
*Breadboard test of MSP430G2553 (DIP Package) on with MSP2515 CAN Controller (DIP) and TJA1050 (DIP).
*Embed DIP Packaging on custom PCB.
*Test second version on Racecar.
VERSION3.0:
*Implement Version 2.0 with a Texas Instruments CAN Controller and Transceiver.





_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)



{kind=link}
Comments
Please log in or sign up to comment.