Traditionally when landing a drone, a relatively large or flat surface area is required to land, which can restrict landing options in certain locations. Several landing techniques for instance, may make it impossible or difficult to land on a moving vehicle or an uneven surface. Further, the drone or the components in the drone are subjected to damage due to landing on hard surfaces, especially if the landing is difficult or the surface is uneven. This can lead to costly repairs and downtime for the drone.
Drone in a Box
The "Drone in a box" can be described as a method where a drone is kept, charged, and launched from a box-like structure. In order to deploy the drone quickly and efficiently to handle the drone, this human interfaced device to safely secure the drone after an operation. Usually, the box-like structure has a docking station with charging capabilities and storage space for the drone while not in use. The drone may be launched from the box when a mission is required, go on its job, and then land back in the box for recharging and storage. This concept is ideal to securely store the drone away for inactive period in the area of operation and securely moving it around.
Drone in a Box Concept
The APU Credit team utilized the Drone in a Box concept aiming to tackle for safe landing, securely storing the drone away for inactive periods, and a safe potability option of drones. The prototype was built upon a landing platform which moved horizontally by the use of a linear stepper actuator, which is remote-controlled using a CapSense HMI controller.
Drone in a Box Concept
The wood that was used for the prototype are Recycled Industrial Plywood from a construction site.
Testing
Before testing on the main Linear Stepper Actuator, a test was conducted on a smaller version.
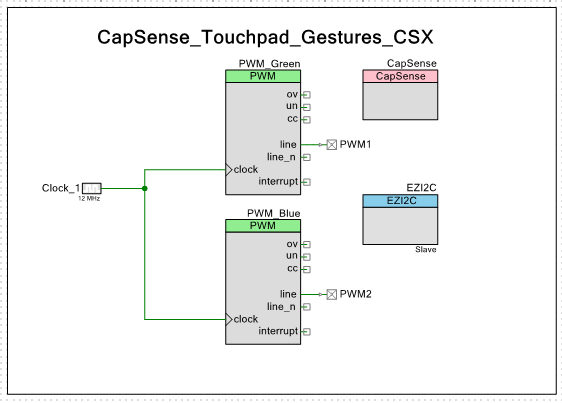
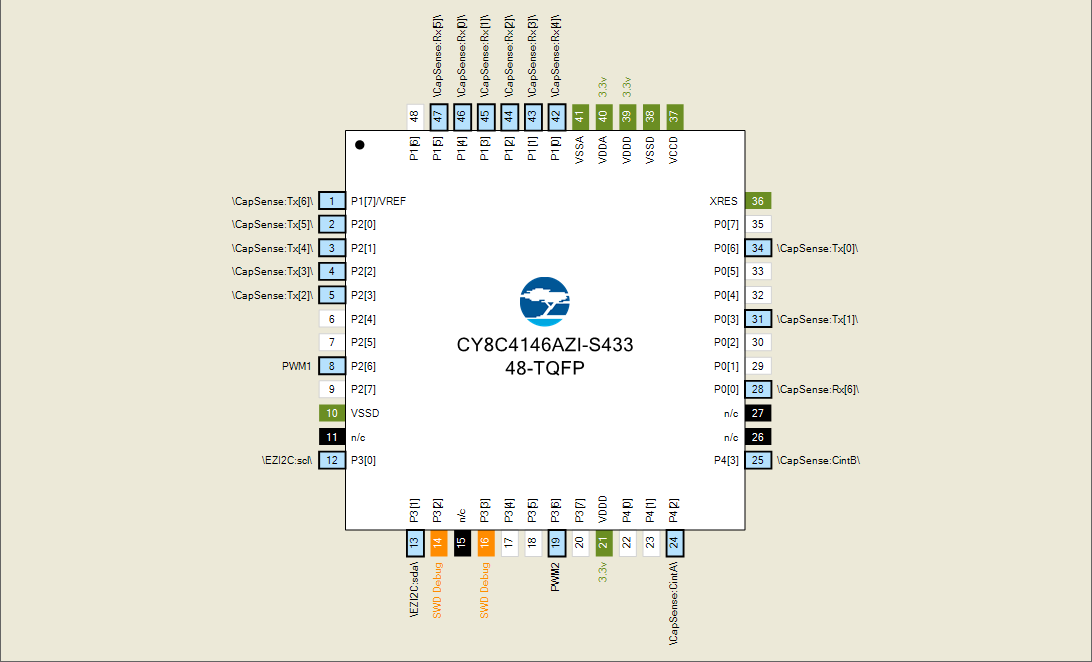
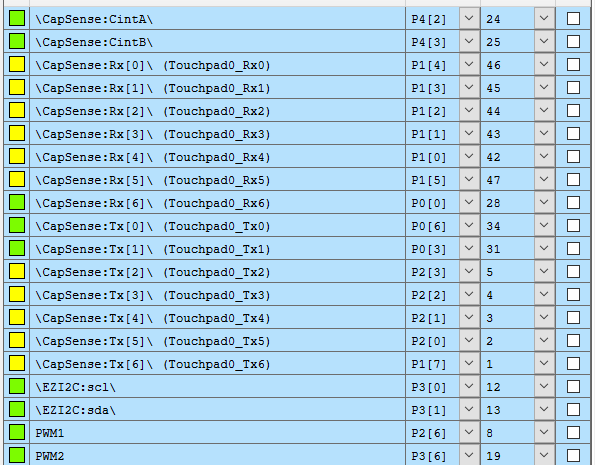
PSoC Creator example CE224821_PSoC4_CapSense_Touchpad_Gestures_CSX01
C/C++
/******************************************************************************** File Name: main.c** Version: 1.10** Description:* This code example demonstrates the PSoC 4 CSD CapSense Component with a touchpad widget* and the use of both gestures and the CapSense tuner. LEDs are also used to show when * specific gestures are detected.******************************************************************************** Copyright (2019-2020), Cypress Semiconductor Corporation.******************************************************************************* This software, including source code, documentation and related materials* ("Software") is owned by Cypress Semiconductor Corporation (Cypress) and is* protected by and subject to worldwide patent protection (United States and * foreign), United States copyright laws and international treaty provisions. * Cypress hereby grants to licensee a personal, non-exclusive, non-transferable* license to copy, use, modify, create derivative works of, and compile the * Cypress source code and derivative works for the sole purpose of creating * custom software in support of licensee product, such licensee product to be* used only in conjunction with Cypress's integrated circuit as specified in the* applicable agreement. Any reproduction, modification, translation, compilation,* or representation of this Software except as specified above is prohibited * without the express written permission of Cypress.* * Disclaimer: THIS SOFTWARE IS PROVIDED AS-IS, WITH NO WARRANTY OF ANY KIND, * EXPRESS OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, NONINFRINGEMENT, IMPLIED * WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE.* Cypress reserves the right to make changes to the Software without notice. * Cypress does not assume any liability arising out of the application or use* of Software or any product or circuit described in the Software. Cypress does* not authorize its products for use as critical components in any products * where a malfunction or failure may reasonably be expected to result in * significant injury or death ("ACTIVE Risk Product"). By including Cypress's * product in a ACTIVE Risk Product, the manufacturer of such system or application* assumes all risk of such use and in doing so indemnifies Cypress against all* liability. Use of this Software may be limited by and subject to the applicable* Cypress software license agreement.*******************************************************************************/#include"project.h"/* PWM duty cycles for zero and fifty percent */#define PWM_LED_OFF 10001#define PWM_LED_HALF_POWER 5000 /* Scales x and y value of the touchpad to PWM compare value */#define PWM_SCALAR 100 /* */#define LED_OFF 1#define LED_ON 0 /******************************************************************************** Function Name: main********************************************************************************* Summary:* The main function performs the following actions:* 1. Starts all hardware Components* 2. Starts the timestamp* 3. Initial scan of all CapSense widgets* 4. Checks if scan is complete* 4. Process all data and update time stamp* 5. Checks if there was a gesture or if the touchpad was touched* 6. Sends all data to the CapSense Tuner* 7. Scans all CapSense widgets and returns to step four** Parameters:* None** Return:* None********************************************************************************/intmain(void){/* Stores the current touchpad X and Y values */uint32Xcord;uint16Ycord;/* Stores the current gesture */uint32gesture;CyGlobalIntEnable;/* Enable global interrupts. *//* Starts all Componenets */EZI2C_Start();CapSense_Start();PWM_Blue_Start();PWM_Green_Start();/* Set up communication data buffer to CapSense data structure to be exposed to I2C master */EZI2C_EzI2CSetBuffer1(sizeof(CapSense_dsRam),sizeof(CapSense_dsRam),(uint8*)&CapSense_dsRam);/* Sets up a callback function using sysTick timer isr, the callback function is part of the CySysTickSetCallback API */CapSense_dsRam.timestampInterval=2u;CySysTickStart();CySysTickSetCallback(0u,CapSense_IncrementGestureTimestamp);CapSense_ScanAllWidgets();for(;;){/* Checks if the scan was completed before trying to process data */if(CapSense_NOT_BUSY==CapSense_IsBusy()){CapSense_ProcessAllWidgets();/* Stores the current detected gesture */gesture=CapSense_DecodeWidgetGestures(CapSense_TOUCHPAD0_WDGT_ID);/* Stores current finger position on the touchpad */Xcord=CapSense_GetXYCoordinates(CapSense_TOUCHPAD0_WDGT_ID);Ycord=Xcord>>16;Xcord=(uint16)Xcord;/* Controls specific LEDs based on the gesture that was captured */switch(gesture){caseCapSense_ONE_FINGER_SINGLE_CLICK:PWM_Blue_WriteCompare(PWM_LED_HALF_POWER);PWM_Green_WriteCompare(PWM_LED_HALF_POWER);break;caseCapSense_ONE_FINGER_EDGE_SWIPE_LEFT:/* If Led was off turn it to half power, if on turn it off */PWM_Blue_WriteCompare(PWM_Blue_ReadCompare()==PWM_LED_OFF?PWM_LED_HALF_POWER:PWM_LED_OFF);break;caseCapSense_ONE_FINGER_EDGE_SWIPE_RIGTH:/* If Led was off turn it to half power, if on turn it off */PWM_Green_WriteCompare(PWM_Green_ReadCompare()==PWM_LED_OFF?PWM_LED_HALF_POWER:PWM_LED_OFF);break;caseCapSense_ONE_FINGER_ROTATE_CW:/* Turns off the red LED */Red_LED_Write(LED_OFF);break;caseCapSense_ONE_FINGER_ROTATE_CCW:/* Turns on the red LED */Red_LED_Write(LED_ON);break;default:/* Check if the touchpad was touched */if(CapSense_GetXYCoordinates(CapSense_TOUCHPAD0_WDGT_ID)!=CapSense_TOUCHPAD_NO_TOUCH){/* Change the PWM compare value based on finger position as long as the light was not off */PWM_Blue_WriteCompare(PWM_Blue_ReadCompare()==PWM_LED_OFF?PWM_LED_OFF:(Xcord*PWM_SCALAR));PWM_Green_WriteCompare(PWM_Green_ReadCompare()==PWM_LED_OFF?PWM_LED_OFF:(Ycord*PWM_SCALAR));}break;}/* Required to maintain sychronization with tuner interface */CapSense_RunTuner();/* Initiates the next scan of all widgets */CapSense_ScanAllWidgets();}}}


























{kind=link}
{kind=link}
{kind=link}
Comments