


Hardware components | ||||||
 |
| × | 3 | |||
| × | 4 | ||||
 |
| × | 4 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
It IoT project aims to find a solution regarding the difficulty of finding available parking spaces in crowded areas.
Finding parking spots in traditional parking lots can be slow and annoying, often causing you to waste time and making traffic worse. Smart parking tunnel solution uses sensors to detect available spaces and communicates that information to a web app. In this way, drivers can quickly and easily locate available parking spots. With the ability to access the data through a web app, drivers can plan and manage their parking before they arrive, saving time and reducing stress. Concept and project architectureThe prototype is designed to perform these to main tasks:
- Detect whther a car is parked inside a parking spot
- Allow system user to reach this information
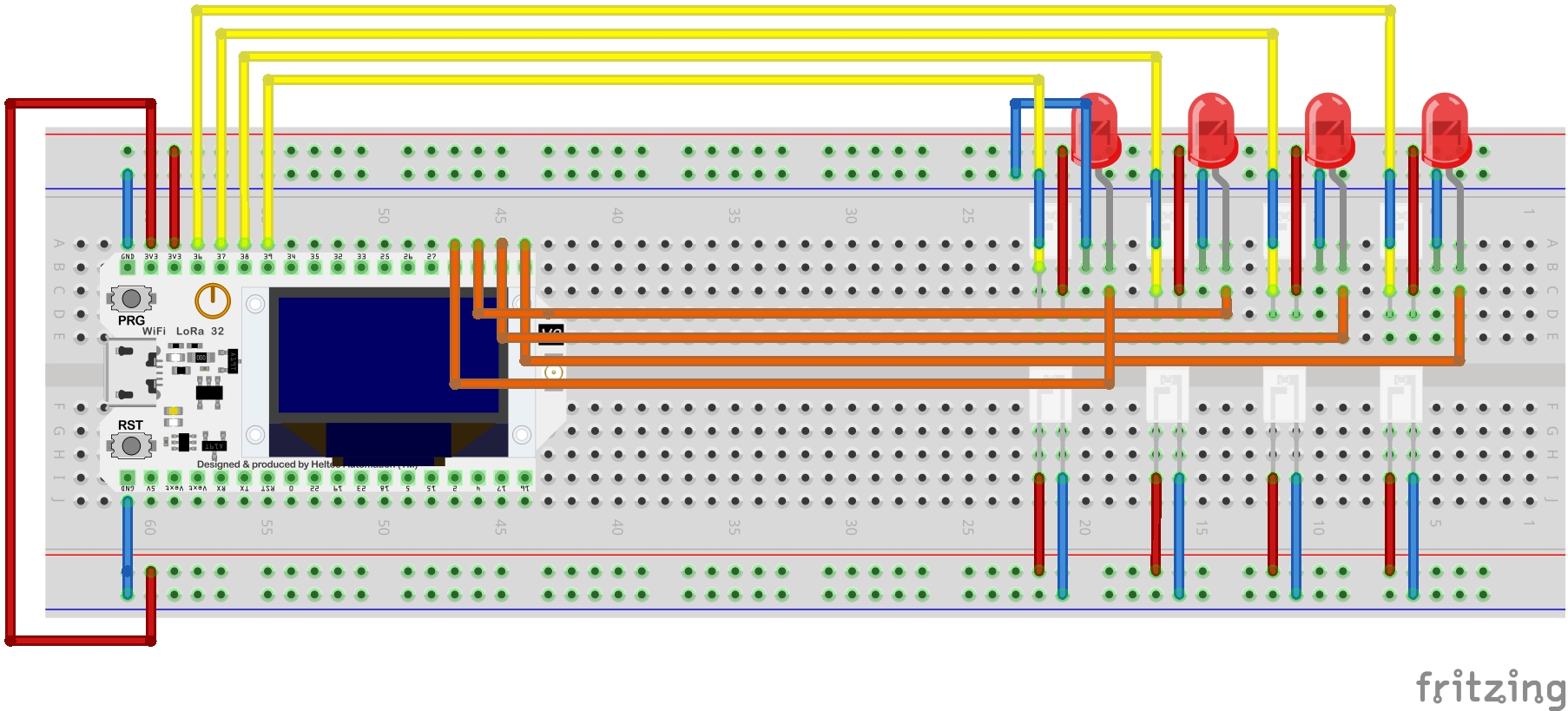
The first task is carried out using several laser sensor, positioned in pairs facing eacnh other. If a car is parked in between the pairs, the laser beam is interrupted, and the car is detected.
The second instead is done either by collecting real-time data and sending it to the web app and by activating some LEDs, positioned over each parking spot, to inform users inside the tunnel about the status of the parking space.
Also, the ESP32 display will be used to simulate a screen which shows a parking map with the free and the occupied parking spots.
The following picture shows a schema about the high-level architecture described.
WiFi LoRa 32 is a classic IoT dev-board designed & produced by Heltec Automation(TM), it’s a highly integrated product based on ESP32 + SX127x, it has Wi-Fi, BLE, LoRa functions, also Li-Po battery management system. It is equipped with an onboard 0.96-inch 128*64 dot matrix Blue OLED display.The display is used to show the parking map with the free and the occupied parking spots.Infrared Emitters and Detectors
- Specifications:Operating Voltage 3.3V ~ 5VTemperature Measurement Range -40°C to 85°CDatasheet
These components are used to detect if a car is parked in a parking spot. They work in pairs, an emitter with a yellow dot on top and a receiver with a red dot. The pair is positioned facing each other, at the ends of each parking spot, so that the LED beam emitted by the emitter points directly the receiver. If a car is then parked inside a parking spot, the led beam will be interrupted, and the car will be therefore detected.10mm LEDs
- Specifications:Forward Voltage 1.8-2.2VDCForward Current 20mAViewing angle 40 degreeOutput 100-150 MCD
A pair of LEDs, one green and one red, are placed in correspondence of each parking spot.The red LED will be switched when a parked car is detected, the green one in the opposite case.
Network DiagramThe above picture is a high level explanation on the network architecture which is used to connect the ESP32v2 board to the web portal.The network architecture is implemented using AWS, which is used to receive the information, process it and make it available through the web application.Therefore, a Python transparent bridge it is used to allow the communication between the board and the AWS architecture. A step-by-step guide on how to set up the connectivity can be found on the github page (link below).
Considerations and evaluationAs we introduced before, the parked car is detected by using a pair of infrared sensors.The emitter is driven up to 50mA. The detect is a NPN transistor that is biased by incoming IR light. The overall system energy consumption will highly depends on the adopted sensors and lights. However, in a real case scenario, each parking spot should have easy access to power supply that can be used for powering the LEDs, the sensors and the ESP32 board.
Avoiding false measurements
Infrared sensors must be positioned so that they only detect the parked car and no other elements that could trigger them (birds, small animals, leaves, etc.). A good solution might be to position them just below the height where the bodywork on average ends and the windows begin. This must however be decided on the basis of the location and specific characteristics of the parking area and parking space.Another solution to avoid false measurements is to take two measurements in a row a few seconds apart. In this way if something was passing through the sensors in the exact moment of the measurement, it can be detected as a false measurement.A last solution, but that requires more effort and expenses, is to use other sensors such as weight or proximity sensors to ensure the avoidance of false measurements.
Possible future implementationsThe proposed prototype could be improved in several ways and could include many other features.The one I would like to highlight in this section is the one that allows parking spots users to remotly reserve the car spot.To implement this improvement, there must be some mechanisms that permits only the users which reserved a parking spot to park on it. For example, an automatic parking barrier could be placed in correspondence of parking spots. This barrier will be activated when someone reserve the parking spot via web app and it will be deactivated by the user that reserved it, always through the web app.








_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.