/*
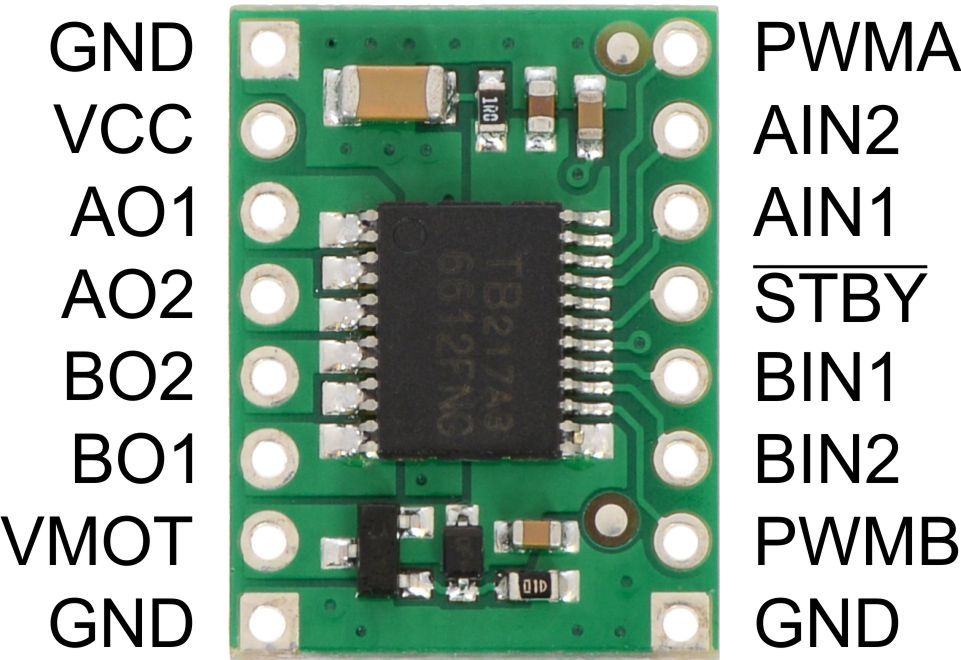
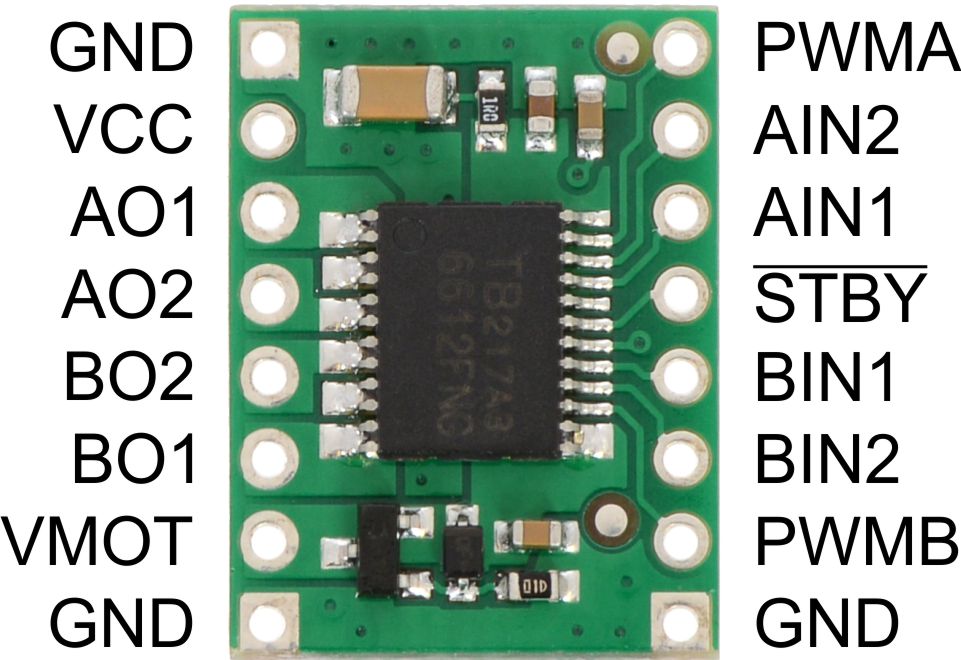
A0 - PWMB (speed right)
A1 - BIN2 (direction bits)
A2 - BIN1
A3 - /STBY (motor enable)
A4 - AIN1 (direction bits)
A5 - AIN2
A6 - PMWA (speed left)
*/
#define STBY A3
#define MOTOR_L 0
#define MOTOR_R 1
#define FWD 0
#define RVS 1
#define BIN1 A2
#define BIN2 A1
#define AIN1 A4
#define AIN2 A5
#define PWM_L A6
#define PWM_R A0
int _speed = 0;
int _duration = 0;
bool _new_command = false;
void setup() {
Serial.begin(9600);
int pin;
for (pin=A0; pin<=A6; pin++) {
pinMode(pin, OUTPUT);
}
for (pin=A0; pin<=A6; pin++) {
digitalWrite(pin, LOW);
}
enableMotors(true);
Spark.function("cmd",cmdRobot);
}
void loop() {
if (_new_command == true) {
setSpeed(MOTOR_L, _speed);
setSpeed(MOTOR_R, _speed);
delay(_duration);
setSpeed(MOTOR_L, 0);
setSpeed(MOTOR_R, 0);
_new_command = false;
}
}
int cmdRobot(String c) {
// c format: x,yyy,zzz,
// x = direction (f/b/l/r)
// y = speed in percentage
// z = duration in milliseconds
//
// fblr, forward, backward, left turn, right turn
int start = 0;
int end = 0;
int speed = 0;
int duration = 0;
if (c.charAt(0) == 'f') {
setDirection(MOTOR_L, FWD);
setDirection(MOTOR_R, FWD);
Serial.println("F");
}
else if (c.charAt(0) == 'b') {
setDirection(MOTOR_L, RVS);
setDirection(MOTOR_R, RVS);
Serial.println("B");
}
else if (c.charAt(0) == 'l') {
setDirection(MOTOR_L, RVS);
setDirection(MOTOR_R, FWD);
Serial.println("L");
}
else if (c.charAt(0) == 'r') {
setDirection(MOTOR_L, FWD);
setDirection(MOTOR_R, RVS);
Serial.println("R");
}
start = c.indexOf(',');
if (start != -1) {
end = c.indexOf(',', start+1);
if (end == -1) {
return 2;
}
}
else {
return 1;
}
speed = c.substring(start+1,end).toInt();
start = end;
end = c.indexOf(',', start+1);
if (end == -1) {
return 3;
}
duration = c.substring(start+1,end).toInt();
Serial.print("Speed: ");
Serial.println(speed);
Serial.print("Duration: ");
Serial.println(duration);
_speed = speed;
_duration = duration;
_new_command = true;
return _duration;
}
void enableMotors(bool enable) {
if (enable) digitalWrite(STBY, HIGH); // enable motor output
else digitalWrite(STBY, LOW); // disable motor output
}
void setDirection(bool motor, bool dir) {
if (motor == MOTOR_L) {
if (dir == RVS) {
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
}
else if (dir == FWD) {
digitalWrite(AIN2, LOW);
digitalWrite(AIN1, HIGH);
}
}
else if (motor == MOTOR_R) {
if (dir == FWD) {
digitalWrite(BIN1, LOW);
digitalWrite(BIN2, HIGH);
}
else if (dir == RVS) {
digitalWrite(BIN2, LOW);
digitalWrite(BIN1, HIGH);
}
}
else {
digitalWrite(AIN1, LOW); // disable all motors
digitalWrite(AIN2, LOW);
digitalWrite(BIN1, LOW);
digitalWrite(BIN2, LOW);
}
}
void setSpeed(bool motor, int speed) {
if (motor == MOTOR_L) {
analogWrite(PWM_L, map(speed,0,100,0,255) );
}
else if (motor == MOTOR_R) {
analogWrite(PWM_R, map(speed,0,100,0,255) );
}
else {
analogWrite(PWM_L, 0); // stop all motors
analogWrite(PWM_R, 0);
}
}









{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.