

The project is mainly focused on getting the orientation and calculating the number of steps taken by user who is carrying the module. MPU6050 has both accelerometer and gyroscope (MEMS).
1 / 2

Add the following snippet to your HTML:

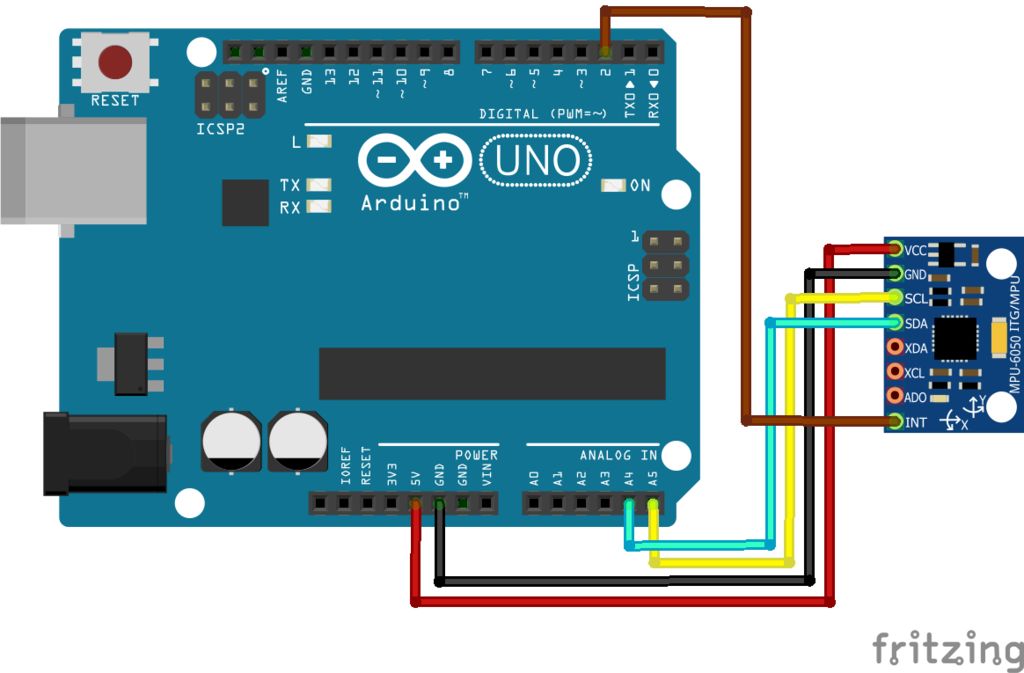
Working of accelerometer+gyroscope with Arduino. MPU6050 is the module for accelerometer and gyromscope (combined).

The project is mainly focused on getting the orientation and calculating the number of steps taken by user who is carrying the module. MPU6050 has both accelerometer and gyroscope (MEMS).


{kind=link}
Comments
Please log in or sign up to comment.