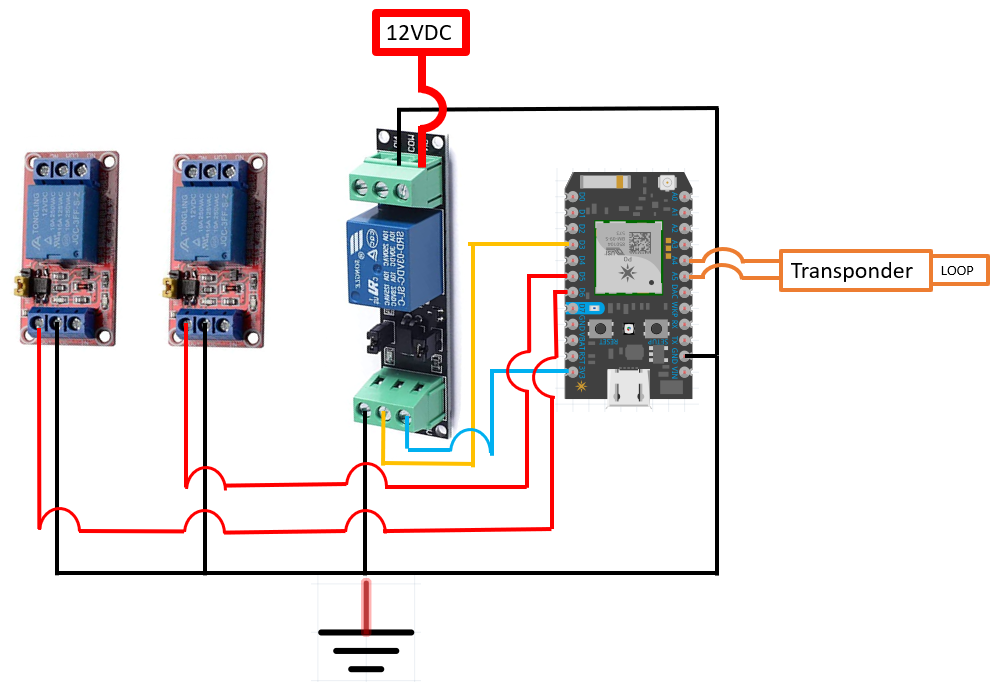
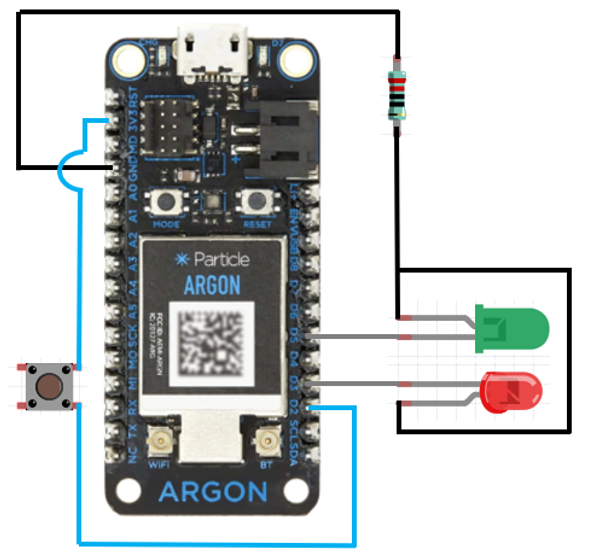
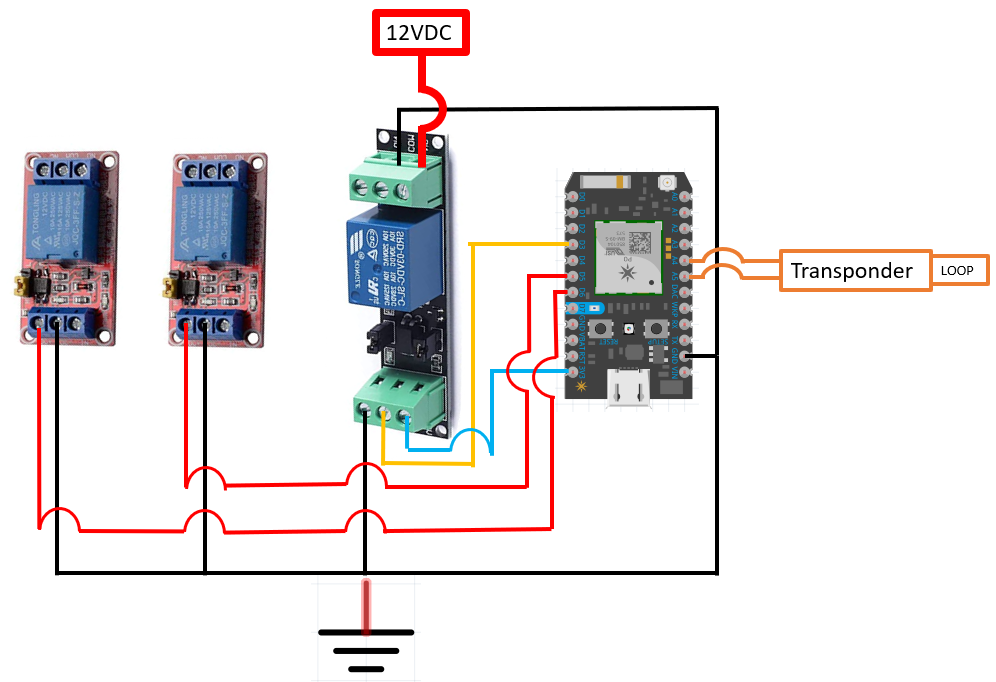
For this project, we used particle argon as a remote and a particle photon as the receiver which starts the car. By pushing a button that is wired to the Argon, we send a signal to the particle photon inside the car that starts the process. The photon uses 3 relays to replicate the signals that the car is receiving.
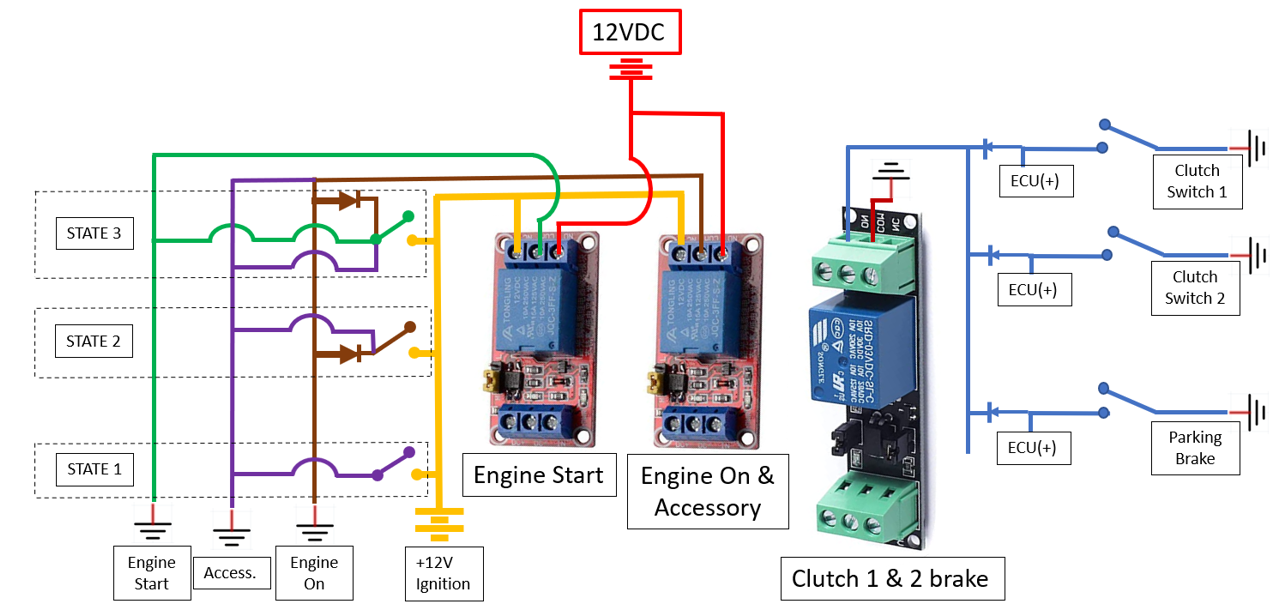
In most cars, there are 3-4 positions you can turn the key. The first stage turns on the accessories. the second puts the full car in the "on" position to prepare for the engine to start. and the third stage starts the car. For this car, we took out all the covers to get to the ignition switch. Next, we found the wires connected to the starter and measured the voltage of each wire in the 3 different stages to find the function of each wire. This allowed us to install relays that replicate the change in voltage going through the individual wires during each stage. In addition to this, a bypass module outfitted with a relay was added which transmits the signal from the chip in the key fob a greater distance. This allows for the key to be hidden in the dash rather than constantly in the ignition.
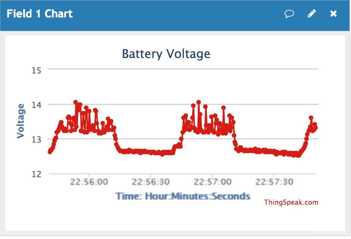
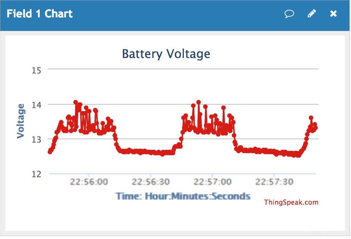
We also use a Carloop to read the information that the car's computer is outputting. to read this information we installed a CANbus module. Using the CANbus we are able to find battery voltage which can be another indicator as to whether the car has been started or not.
For our set up we have lights to indicate if the car has been started or not. A red light is displayed to show that the car has not been started while a green light indicates that the car started successfully.
The sensors used in this project are the Carloop on the Particle Photon and a simple button on the Particle Argon.
the particle photon and argon





_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.