

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
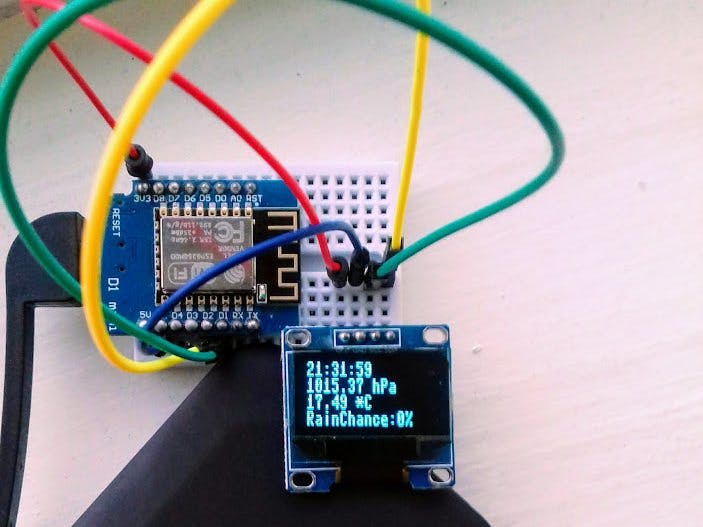
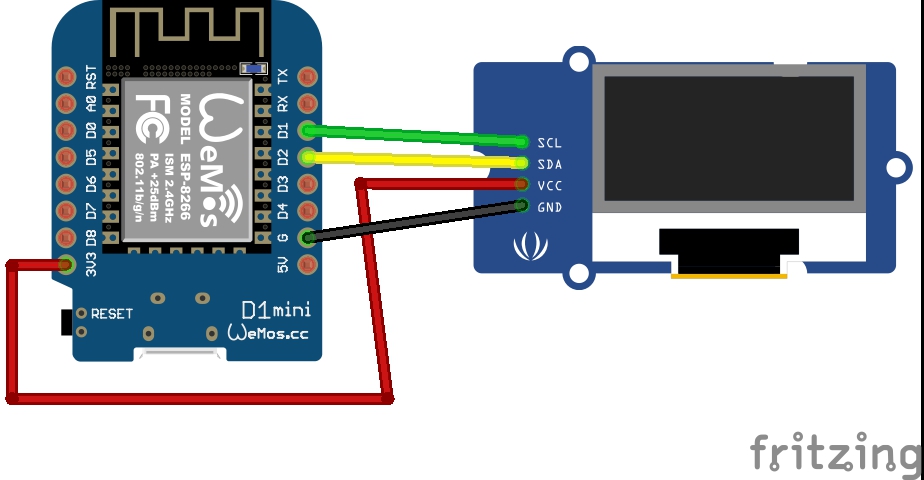
A tiny weather clock, using only a Wemos D1 Mini and a 128x32 OLED. The clock shows the time, atmospheric pressure, apparent temperature, and the probability it will rain.
You will need to visit: https://darksky.net/dev/register
Get your API key and the latitude and longitude of the location you want to monitor. Make the neccessary changes in the main.py file.
I have also included the Adafruit OLED driver for MicroPython. Make sure you load this file onto the Wemos.
To get network access, enter your WiFi password and ssid in boot.py.
The Wemos contacts the Darksky API once every two minues for weather updates. This keeps it under the 1,000-request daily limit.
main.py
MicroPythonThe main file for the micropython board. Make sure to replace the api key and latitude and longtitude in the url for the request.
import time
import machine, ssd1306
import urequests
# Register for Darksky api
# Change the [key], [latitude] and [longitude] values below
url = 'https://api.darksky.net/forecast/[key]/[latitude],[longitude]?units=si&exclude=minutely,hourly,daily,alerts'
resp = urequests.get(url) # Send the request
def setClock():
hours = str(time.localtime()[3])
mins = str(time.localtime()[4])
secs = str(time.localtime()[5])
if int(secs) < 10:
secs = '0' + secs
if int(mins) < 10:
mins = '0' + mins
if int(hours) < 10:
hours = '0' + hours
DSave = int(hours) + 1
# Change the 1 to 0 if not daylight savings
if DSave > 23:
DSavehours = '00'
DSavehours = str(DSave)
timestr = DSavehours + ':' + mins + ':' + secs
return timestr
i2c = machine.I2C(-1, machine.Pin(5), machine.Pin(4))
oled = ssd1306.SSD1306_I2C(128, 32, i2c)
while True:
timestr = setClock()
pressurestr = str(resp.json()['currently']['pressure']) + ' hPa'
tempstr = str(resp.json()['currently']['apparentTemperature']) + ' *C'
rainstr = 'RainChance:' + str(int(float(resp.json()['currently']['precipProbability']) * 100)) + '%'
minutes = int(timestr.split(':')[1])
secs = int(timestr.split(':')[2])
if (minutes % 2 == 0) and (secs == 0):
resp = urequests.get(url)
oled.fill(0)
oled.show()
oled.text(timestr, 0, 1)
oled.text(pressurestr, 0, 9)
oled.text(tempstr, 0, 17)
oled.text(rainstr, 0, 25)
oled.show()
time.sleep(1)
boot.py
MicroPythonNetwork Config for micropython board. Change 'WIFI-Network' and 'Password' to your own values.
import esp
import network
import socket
import gc
esp.osdebug(None)
from ntptime import settime
gc.collect()
def do_connect():
sta_if = network.WLAN(network.STA_IF)
if not sta_if.isconnected():
print('connecting to network...')
sta_if.active(True)
sta_if.connect('WIFI-Network', 'Password')
while not sta_if.isconnected():
pass
do_connect() # Connect to WIFI
settime() # Use NTP to set clock
ssd1306.py
MicroPythonAdafruit MicroPython driver for SSD1306 OLED displays.
https://github.com/adafruit/micropython-adafruit-ssd1306
https://github.com/adafruit/micropython-adafruit-ssd1306
# MicroPython SSD1306 OLED driver, I2C and SPI interfaces
# https://github.com/adafruit/micropython-adafruit-ssd1306
import time
import framebuf
# register definitions
SET_CONTRAST = const(0x81)
SET_ENTIRE_ON = const(0xa4)
SET_NORM_INV = const(0xa6)
SET_DISP = const(0xae)
SET_MEM_ADDR = const(0x20)
SET_COL_ADDR = const(0x21)
SET_PAGE_ADDR = const(0x22)
SET_DISP_START_LINE = const(0x40)
SET_SEG_REMAP = const(0xa0)
SET_MUX_RATIO = const(0xa8)
SET_COM_OUT_DIR = const(0xc0)
SET_DISP_OFFSET = const(0xd3)
SET_COM_PIN_CFG = const(0xda)
SET_DISP_CLK_DIV = const(0xd5)
SET_PRECHARGE = const(0xd9)
SET_VCOM_DESEL = const(0xdb)
SET_CHARGE_PUMP = const(0x8d)
class SSD1306:
def __init__(self, width, height, external_vcc):
self.width = width
self.height = height
self.external_vcc = external_vcc
self.pages = self.height // 8
# Note the subclass must initialize self.framebuf to a framebuffer.
# This is necessary because the underlying data buffer is different
# between I2C and SPI implementations (I2C needs an extra byte).
self.poweron()
self.init_display()
def init_display(self):
for cmd in (
SET_DISP | 0x00, # off
# address setting
SET_MEM_ADDR, 0x00, # horizontal
# resolution and layout
SET_DISP_START_LINE | 0x00,
SET_SEG_REMAP | 0x01, # column addr 127 mapped to SEG0
SET_MUX_RATIO, self.height - 1,
SET_COM_OUT_DIR | 0x08, # scan from COM[N] to COM0
SET_DISP_OFFSET, 0x00,
SET_COM_PIN_CFG, 0x02 if self.height == 32 else 0x12,
# timing and driving scheme
SET_DISP_CLK_DIV, 0x80,
SET_PRECHARGE, 0x22 if self.external_vcc else 0xf1,
SET_VCOM_DESEL, 0x30, # 0.83*Vcc
# display
SET_CONTRAST, 0xff, # maximum
SET_ENTIRE_ON, # output follows RAM contents
SET_NORM_INV, # not inverted
# charge pump
SET_CHARGE_PUMP, 0x10 if self.external_vcc else 0x14,
SET_DISP | 0x01): # on
self.write_cmd(cmd)
self.fill(0)
self.show()
def poweroff(self):
self.write_cmd(SET_DISP | 0x00)
def contrast(self, contrast):
self.write_cmd(SET_CONTRAST)
self.write_cmd(contrast)
def invert(self, invert):
self.write_cmd(SET_NORM_INV | (invert & 1))
def show(self):
x0 = 0
x1 = self.width - 1
if self.width == 64:
# displays with width of 64 pixels are shifted by 32
x0 += 32
x1 += 32
self.write_cmd(SET_COL_ADDR)
self.write_cmd(x0)
self.write_cmd(x1)
self.write_cmd(SET_PAGE_ADDR)
self.write_cmd(0)
self.write_cmd(self.pages - 1)
self.write_framebuf()
def fill(self, col):
self.framebuf.fill(col)
def pixel(self, x, y, col):
self.framebuf.pixel(x, y, col)
def scroll(self, dx, dy):
self.framebuf.scroll(dx, dy)
def text(self, string, x, y, col=1):
self.framebuf.text(string, x, y, col)
class SSD1306_I2C(SSD1306):
def __init__(self, width, height, i2c, addr=0x3c, external_vcc=False):
self.i2c = i2c
self.addr = addr
self.temp = bytearray(2)
# Add an extra byte to the data buffer to hold an I2C data/command byte
# to use hardware-compatible I2C transactions. A memoryview of the
# buffer is used to mask this byte from the framebuffer operations
# (without a major memory hit as memoryview doesn't copy to a separate
# buffer).
self.buffer = bytearray(((height // 8) * width) + 1)
self.buffer[0] = 0x40 # Set first byte of data buffer to Co=0, D/C=1
self.framebuf = framebuf.FrameBuffer1(memoryview(self.buffer)[1:], width, height)
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.temp[0] = 0x80 # Co=1, D/C#=0
self.temp[1] = cmd
self.i2c.writeto(self.addr, self.temp)
def write_framebuf(self):
# Blast out the frame buffer using a single I2C transaction to support
# hardware I2C interfaces.
self.i2c.writeto(self.addr, self.buffer)
def poweron(self):
pass
class SSD1306_SPI(SSD1306):
def __init__(self, width, height, spi, dc, res, cs, external_vcc=False):
self.rate = 10 * 1024 * 1024
dc.init(dc.OUT, value=0)
res.init(res.OUT, value=0)
cs.init(cs.OUT, value=1)
self.spi = spi
self.dc = dc
self.res = res
self.cs = cs
self.buffer = bytearray((height // 8) * width)
self.framebuf = framebuf.FrameBuffer1(self.buffer, width, height)
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs.high()
self.dc.low()
self.cs.low()
self.spi.write(bytearray([cmd]))
self.cs.high()
def write_framebuf(self):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs.high()
self.dc.high()
self.cs.low()
self.spi.write(self.buffer)
self.cs.high()
def poweron(self):
self.res.high()
time.sleep_ms(1)
self.res.low()
time.sleep_ms(10)
self.res.high()







{kind=link}
Comments