


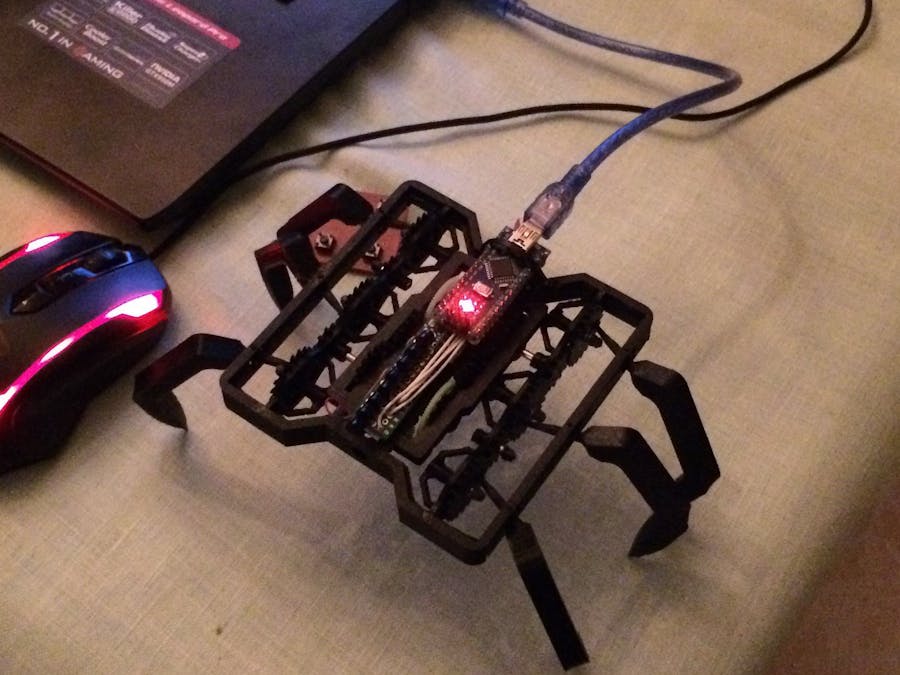
I designed the robot completly from scratch. The robot only uses 2 small coreless motors and 2 photosensors. The robot walks towards lights as it compares the values between the front photosensor and the rear photosensor. If the rear sensor detects more light than the front sensor the robot will turn until the front sensor detects more light than the rear sensor and the robot will then walk towards it. I used 8 transistors to make the 2 motors run left and right and at different speeds using PWM (see wiring diagram). The program is only 843 bytes big as it only needs to read and compare the value's of the photosensors and only needs to tell the motors to go on or off, left or right. The robot is powered by a 2 cell 200 mah lipo. part files can be found here: https://hackaday.io/project/52706-3d-printable-linear-actuator
DetailsThe controller is an Arduino Nano.
The coreless motors used in this project are from a small toy RC helicopter.
The bearings for the gears are just tubes from an antenna and this works very good.
The parts are printed in PLA plastic.
I used superglue to glue al the pieces together.
The transistors used are some I had lying around.
1 KB challenge
Build InstructionsStep 1
Included in the files is a file called "anatomy spider bot" here you can see how to assemble the robot and wich are the left and right sides of the frame and the limbs.
Step 2
Included in the files is a diagram to see how the connections to the Arduino are.
Step 3
Included in the files is the code for the robot.
Files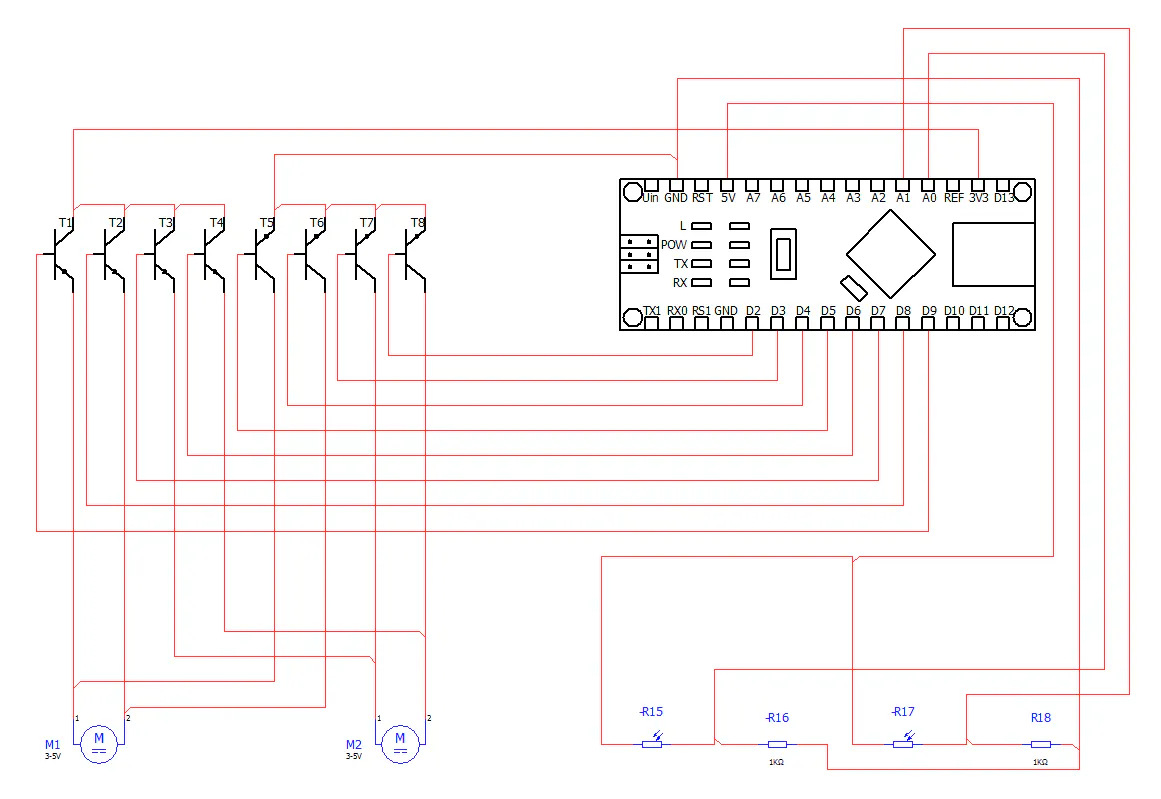







{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.