It's a self-driving rover that is capable of sensing its environment via sensors and navigating itself without any interruption.
IndexIntroductionOur end product is a rover that navigate by itself. Setting up the rover with sensors and we finally concluded by executing the code.
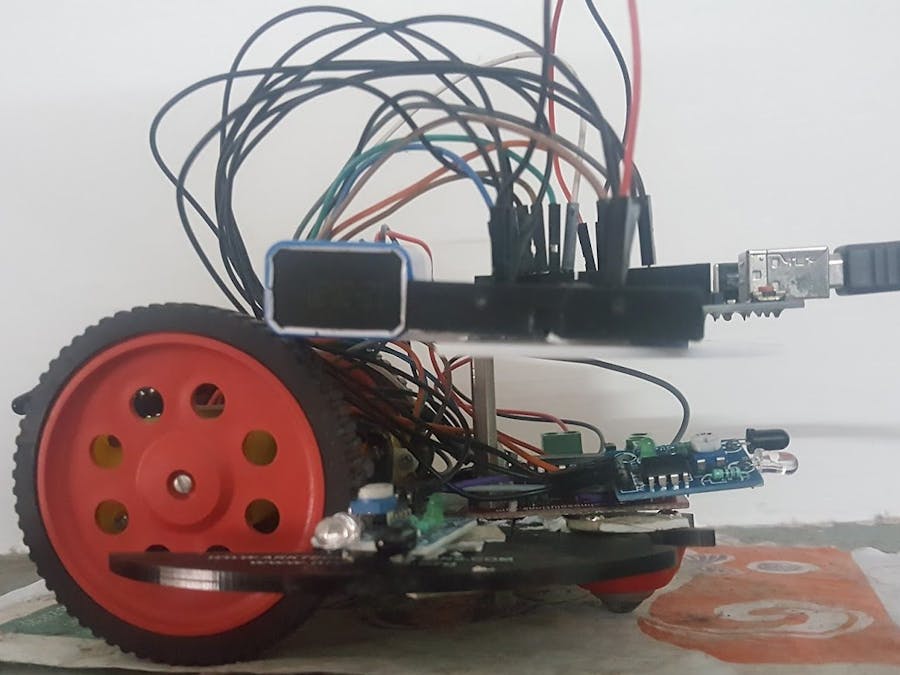
Build the RoverHave any basic framework, any hard material box would do the job, we scrapped some material we had in our college to have our basic framework, after setting up a basic box structure fit wheels and DC motor on both sides of the box, use a ball bearing for the front wheel.
Mount the Arduino and add a battery in it for supply, and four IR sensor are fixed in four side of the rover, for more accuracy you use UV sensor also.
Connect the H-bridge motor driver with motor.
Connect the four sensor and the bridge board to the arduino and upload the code in Arduino.



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


Comments