/*
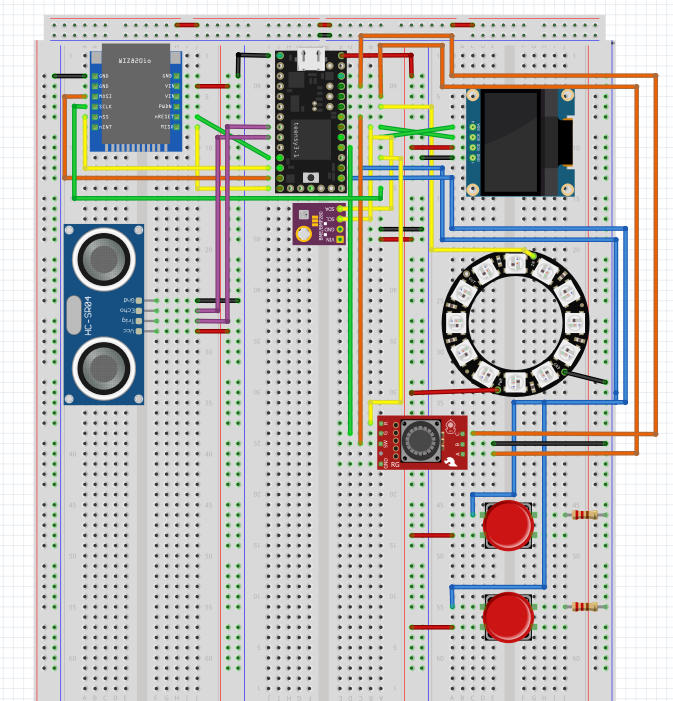
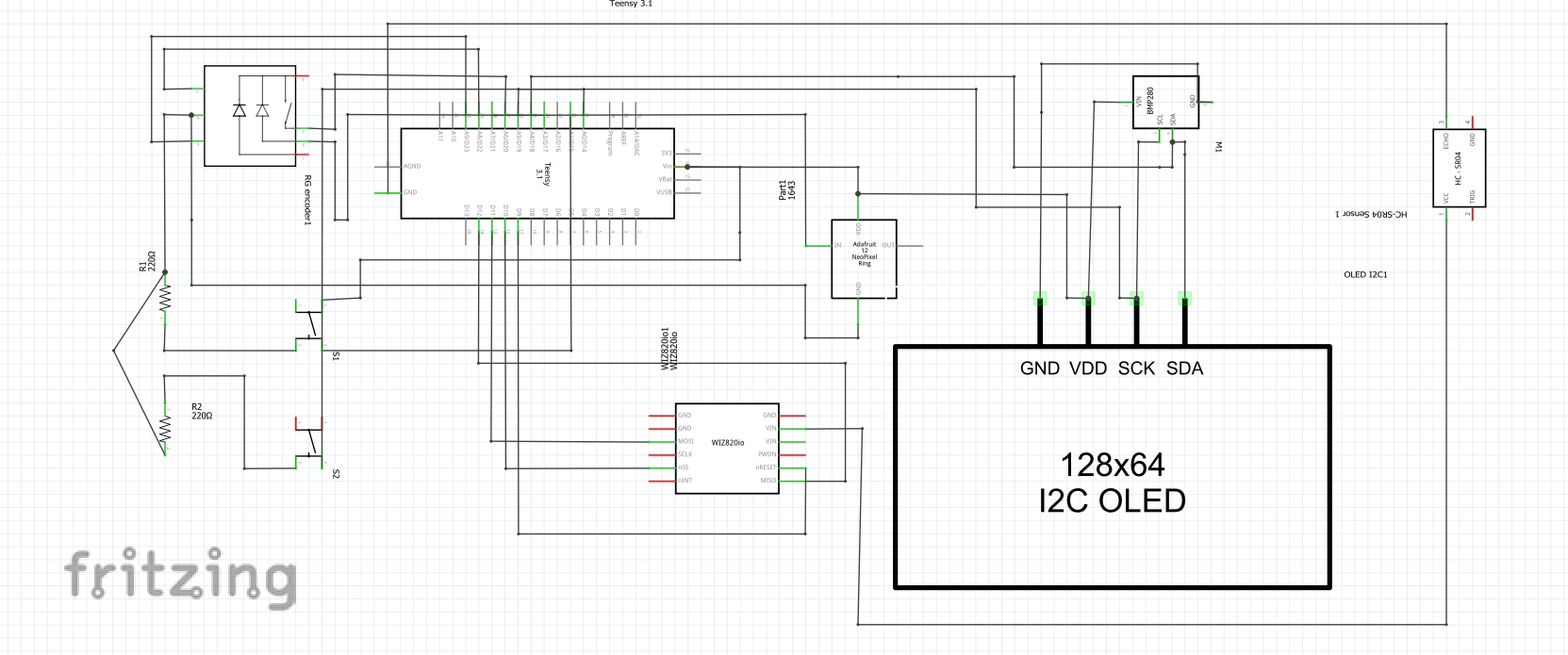
* Project: Smart_Room_Controller: Cohort 4 Midterm
* Description: Controls two modes: Default mode (working) and Break mode
* to encourge a worker to get up from desk and move their body.
* Author: Carli Stringfellow
* Date: 04-12-2021
*/
#include <OneButton.h>
#include <SPI.h>
#include <Ethernet.h>
#include <Encoder.h>
#include <mac.h>
#include <wemo.h>
#include <hue.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <Adafruit_BME280.h>
#include <Adafruit_NeoPixel.h>
#include "colors.h"
//Pixel declarations
const int PIXELPIN = 21;
const int PIXELCOUNT = 12;
int r;
int p;
Adafruit_NeoPixel pixel(PIXELCOUNT, PIXELPIN, NEO_GRB + NEO_KHZ800);
int currentTime;
int lastSecond;
//Ultrasonic declarations
const int echoPin = 7;
const int trigPin = 6;
unsigned long duration; // variable for the duration of sound wave travel
int distance; // variable for the distance measurement
int lastDistance;
int dist_cm;
float inches;
//Bme declarations
const int chipSelect = 4;
float tempF;
float humidRH;
Adafruit_BME280 bme;
char D = 248;
//oled declarations
const int SCREEN_WIDTH = 128; // OLED display width, in pixels
const int SCREEN_HEIGHT = 64; // OLED display height, in pixels
const int SCREEN_ADDRESS = 0x3C;
char N = 164;
const int OLED_RESET = 4;
int rot = 0;
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
EthernetClient client;
bool status;
// Orange and yellow button declarations
OneButton orangeButton (14, false);
OneButton yellowButton (15, false);
bool orangeButtonState;
bool yellowButtonState;
const int TEAPOT = 3;
const int FAN = 2;
float f = tempF;
bool manualFan;
// Encoder declarations
OneButton encoderButton(20, true, true);
Encoder myEnc(22,23);
bool encoderButtonState = true;
bool firstRelax = true;
const int REDLED = 16;
const int GREENLED = 17;
int position;
const int ENMIN = 0;
const int ENMAX = 96;
const int HUEMIN = 0;
const int HUEMAX = 12;
int HueBri;
int b = 0;
// Hue lights arrays used in defaultMode and breakMode functions
int HueWork[] = {HueBlue, HueGreen, HueBlue, HueIndigo, HueGreen};
int HueRelax[] = {HueRed, HueYellow, HueOrange, HueRed, HueYellow};
// Timer Declarations
unsigned long startTimer;
bool timerON = true;
const int sittingDistance = 50;
const int sittingTime = 15000;
bool takingBreak;
void setup() {
pixel.begin();
pixel.show();
pixel.setBrightness(20);
Serial.begin(9600); //Turns on serial monitor
bme.begin(0x76); // Turns on bme sensor
pinMode(trigPin, OUTPUT); // Sets the trigPin as an OUTPUT
pinMode(echoPin, INPUT); // Sets the echoPin as an INPUT
display.setRotation(rot); // Sets rotation to rot = 0
lastDistance = 0;
// SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally
if(!display.begin(SSD1306_SWITCHCAPVCC, SCREEN_ADDRESS)) {
Serial.println(F("SSD1306 allocation failed"));
for(;;); // Don't proceed, loop forever
}
// Show initial display buffer contents on the screen --
// the library initializes this with an Adafruit splash screen.
display.display();
delay(2000); // Pause for 2 seconds
display.clearDisplay(); // Clears display buffer
// orangebutton set up
orangeButton.attachClick(orangeClick);
orangeButton.setClickTicks(500);
orangeButton.setPressTicks(2000);
//yellowbutton set up
yellowButton.attachClick(yellowClick);
yellowButton.setClickTicks(500);
yellowButton.setPressTicks(2000);
//encoderbutton set up
pinMode(REDLED,OUTPUT);
pinMode(GREENLED,OUTPUT);
encoderButton.attachClick(encoderClick);
encoderButton.attachLongPressStart(resetToDefault);
encoderButton.setClickTicks(500);
encoderButton.setPressTicks(2500);
// Ensures all SPI devices are off
pinMode(10, OUTPUT);
digitalWrite(10, HIGH);
pinMode(4, OUTPUT);
digitalWrite(4, HIGH);
//Start ethernet connection
status = Ethernet.begin(mac);
if (!status) {
Serial.printf("failed to configure Ethernet using DHCP \n");
//no point in continueing
while(1);
}
}
void loop() {
ultraSonic();
orangeButton.tick(); // checks teapot buttonstate
yellowButton.tick(); // checks fan buttonstate
encoderButton.tick(); // encoder controls brightness and toggles hues on/off
if(!takingBreak) {
defaultMode(); // Calls main function (the working mode)
}
// breakMode();
}
void orangeClick() { // Toggles teapot wemo
orangeButtonState = !orangeButtonState;
if(orangeButtonState) {
switchON(TEAPOT);
}
else {
switchOFF(TEAPOT);
}
// Serial.printf("orangeButtonState = %i", orangeButtonState);
}
void yellowClick() { // Toggles fan wemo
yellowButtonState = !yellowButtonState;
manualFan = true;
if(yellowButtonState) {
switchON(FAN);
}
else {
switchOFF(FAN);
}
// Serial.printf("yellowButtonState = %i", yellowButtonState);
}
void encoderClick() { // turns hues off
encoderButtonState = !encoderButtonState;
// Serial.printf("encoderButtonState = %i\n", encoderButtonState);
}
void defaultMode() { //this is work mode as the most time is spent here
pixel.clear();
display.clearDisplay();
display.setTextSize(1); // Normal 1:1 pixel scale
display.setTextColor(SSD1306_WHITE); // Draw WHITE text
display.setCursor(0,0); // Start at top-left corner
tempF = 1.8*(bme.readTemperature())+32; // Converts celsius to fahrenheit
display.printf("Tempurature is %0.1f%c\n" ,tempF, D);
// Serial.printf("Tempurature is %0.1f\n" ,tempF);
humidRH = bme.readHumidity(); // displays humidity
display.printf("Humidity is %0.1f\n" ,humidRH);
// Serial.printf("Humidity is %0.1f\n" ,humidRH);
display.printf("Distance:\n%0.01f inches\n\n", inches);
display.printf("\n");
display.printf("\n");
display.printf("You are in WORK MODE");
display.display();
if(manualFan == false) {
if(tempF >= 75){
yellowClick();
}
}
position = myEnc.read(); //sets parameter for encoder
if (position > 96) {
position = 96;
myEnc.write(96);
}
if (position < 0) {
position = 0;
myEnc.write(0);
}
// default (work mode) lighting
HueBri = map(position, ENMIN, ENMAX, HUEMIN, HUEMAX); //maps encoder to huebrightness
// Serial.printf("%i", HueBri);
currentTime = millis();
if((currentTime-lastSecond) > 1000) {
for(b=1; b<=5; b++) {
if(encoderButtonState == true) {
digitalWrite(REDLED,LOW);
digitalWrite(GREENLED,HIGH);
setHue(b, true, HueWork[b-1], HueBri*20, 190);
}
else {
digitalWrite(REDLED,HIGH);
digitalWrite(GREENLED,LOW);
setHue(b, false, HueWork[b-1], 0, 0);
}
}
lastSecond = millis();
}
if(timerON) {
if((millis() - startTimer) > sittingTime) {
if(inches <= sittingDistance) {
breakMode();
timerON = false;
Serial.printf("timer: \n", timerON);
}
}
}
pixel.show();
pixel.clear();
}
void breakMode() { // automatic mode triggered by ultrasonic wave in inches
takingBreak = true;
display.clearDisplay();
display.setTextSize(1); // Normal 1:1 pixel scale
display.setTextColor(SSD1306_WHITE); // Draw WHITE text
display.setCursor(0,0); // Start at top-left corner
display.printf("\n");
display.printf("Time to Relax\n");
display.printf("\n");
display.printf("Take a Break\n");
display.printf("\n");
display.printf("STRETCH YOUR BODY\n");
display.printf("\n");
display.display();
for(b=1; b<=5; b++) {
setHue(b, true, HueRelax[b-1], 255, 255);
}
// flashes pixel ring in different colors to simulate an alarm
pixel.clear();
for(p=0;p<PIXELCOUNT;p++) {
r = random(0x000000, 0xFFFFFF);
pixel.fill(r,p,12);
pixel.show();
}
Serial.printf("Timer status:\n", timerON);
}
void resetToDefault() { // Uses longpress on the encoder to reset to default mode
takingBreak = false;
defaultMode();
manualFan = false;
timerON = true;
firstRelax = true;
startTimer = millis();
pixel.clear();
}
void ultraSonic() {
//Sends ultrasonic pulse
digitalWrite(trigPin, LOW); // Clears the trigPin condition
delayMicroseconds(2);
// Sets the trigPin HIGH (ACTIVE) for 10 microseconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculates the distance
distance = duration * 0.34 / 2; // time passed * speed of sound divided by 2 (go and back)
dist_cm = distance / 10;
inches = dist_cm * 0.3937;
// Displays the distance on the Serial Monitor
Serial.printf("Distance:\n%0.02f inches\n\n", inches);
lastDistance = distance;
}













_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)




{kind=link}
{kind=link}
Comments