


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 6 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
Who is Otto?
An interactive robot that anyone can make!
What can Otto do?
Otto walks, dances, makes sounds and avoids obstacles.
Why Is Otto special?
Otto is completely open source, Arduino compatible, 3D printable, and with a social impact mission to create an inclusive environment for kids.
Otto was inspired by another robot instructable BoB the BiPed and programmed using code from another open source biped robot called Zowi.
CC-BY-SA
Otto's differences are in the assembled size (11cm x 7cm x12cm), cleaner integration of components and expressions. Using off the shelf and 3D printed parts, simple electronics connections (almost no welding required), and basic coding skills, you will be able to build your own cute Otto friend in as little as one hour! or even less
Otto was design using Autodesk 123D Design, now ThinkerCAD software you can modify it for customization or further improvements!
This step by step focuses on how to build the Otto DIY simple version; yes, there are more advanced bipdeal robots like Otto DIY+ or Tito
Step 1: First gather all parts and toolsGather all the off the shelf hardware parts that you'll need for this assembly.
mini bread board is an alternative for the shield but more wiring and time required
Then you only need to 3D print 6 parts in total:
3D printed head.
3D printed body.
3D printed leg x2.
3D printed foot x2
Optional: cutter for post cleaning the 3D parts (if the 3D print quality is good enough no need) and a soldering iron (if you want it battery power otherwise can still connect it through USB to energize)
That's all simple!; download all .stl files, If you do not have a 3D printer you can always got to your local maker space.
3D print settingsOtto is very well designed for 3D printing, the files that you had downloaded are property oriented and centered, so wont give you trouble if you follow this common parameters:
- Recommended to use a FDM 3D printer with PLA material.
- No need supports or rafts at all.
- Resolution: 0.15mm
- Fill density 20%
For slicing and generating the g code for the machine free slicer software like Cura or in our case FlashPrint that comes with the FlashForge Finder 3D printer that we are using (If you are outsourcing the printing no need to worry about it)
After printing you will need to clean a little bit the legs and feet areas that fix the motors.
Check your partsAs mention in step 2, Micro servo motors come with 3 screws in the picture are now included and rearranged the parts number for easy reading.
Remember to have magnetized your mini screwdriver.
Download or print the instructions manuals or just follow this video:
Foot servos assemblyPut the micro servo inside feet and then push it inside, if is to hard maybe need to clean more the area with a cutter.
Is very important to check that the servo is able to rotate at least 90 degrees to each side.
After checking the movement use only the small screw to fix it.
Same process for the other foot.
Fix Servos to BodyTake the other 2 micro servos put them in the defined locations in the 3D printed body and fix them only with the pointed screws.
Fix Legs to BodyConnect the legs to the hub of the micro servo, important like the foot servos you must check the legs are able to rotate 90 degrees each side respect to the body.
After verifying the alignment fix them using the small screws to the hole inside the leg.
Fix Foot to LegsTaking care of the cables as showed in the illustration you should put the cables inside the slots of the body passing thought the hole of the legs.
Once they are in right position use the pointed screws to fix them from the back.
Head assemblyStart from the ultrasound sensor is important to pull out the eyes to the limit.
After putting the Arduino nano in the shield, optionally you can weld the battery holder positive cable to Vin in the board and negative to any GND.
Insert diagonally the both boards together facing the USB conector to the hole in the 3D printed head, then use the last 2 pointed screws to fix it.
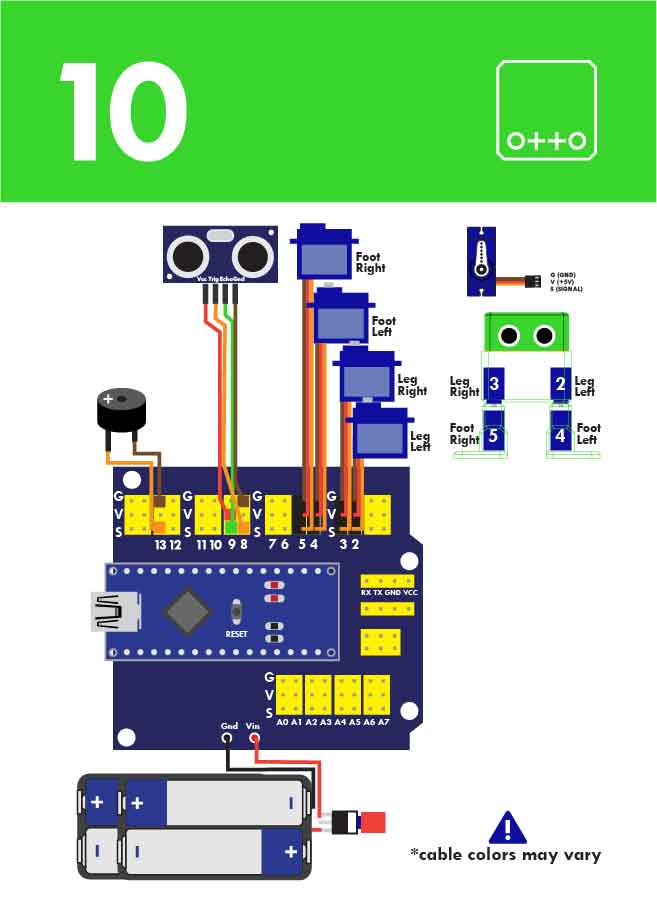
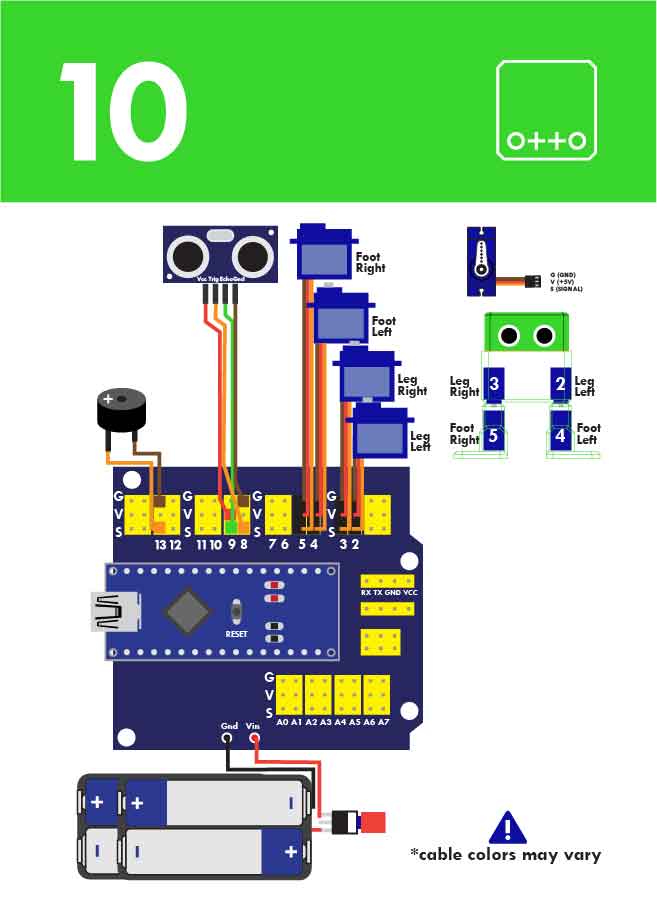
Step 9: Electric connectionPrepare the DuPont cables, micro switch and buzzer.
Then follow the diagram pins numbers and make sure to put them in the right position.
If you don't have or find the Arduino Nano shield use a bread board and follow this circuit diagram TinkerCAD Circuits
Code with BlocksYou can always try the source Arduino codes from Otto Blockly or the community
Here you can find some complimentary tutorials for beginners to quickly get started with Arduino for each component:










{kind=link}
Comments
Please log in or sign up to comment.