It's a Holocron lamp using the force open and close. With the wave of a hand over the top any discerning Jedi can access the path the the light.
This project is based around the Particle Photon IoT dev board, and I have to say this has been a joy to work on!
In the trailer you can see a few images and videos from the start to the finish.
This was my initial concept image idea modelled and rendered in Fusion 360
This is a little animation video showing how i imagined the holocron would work
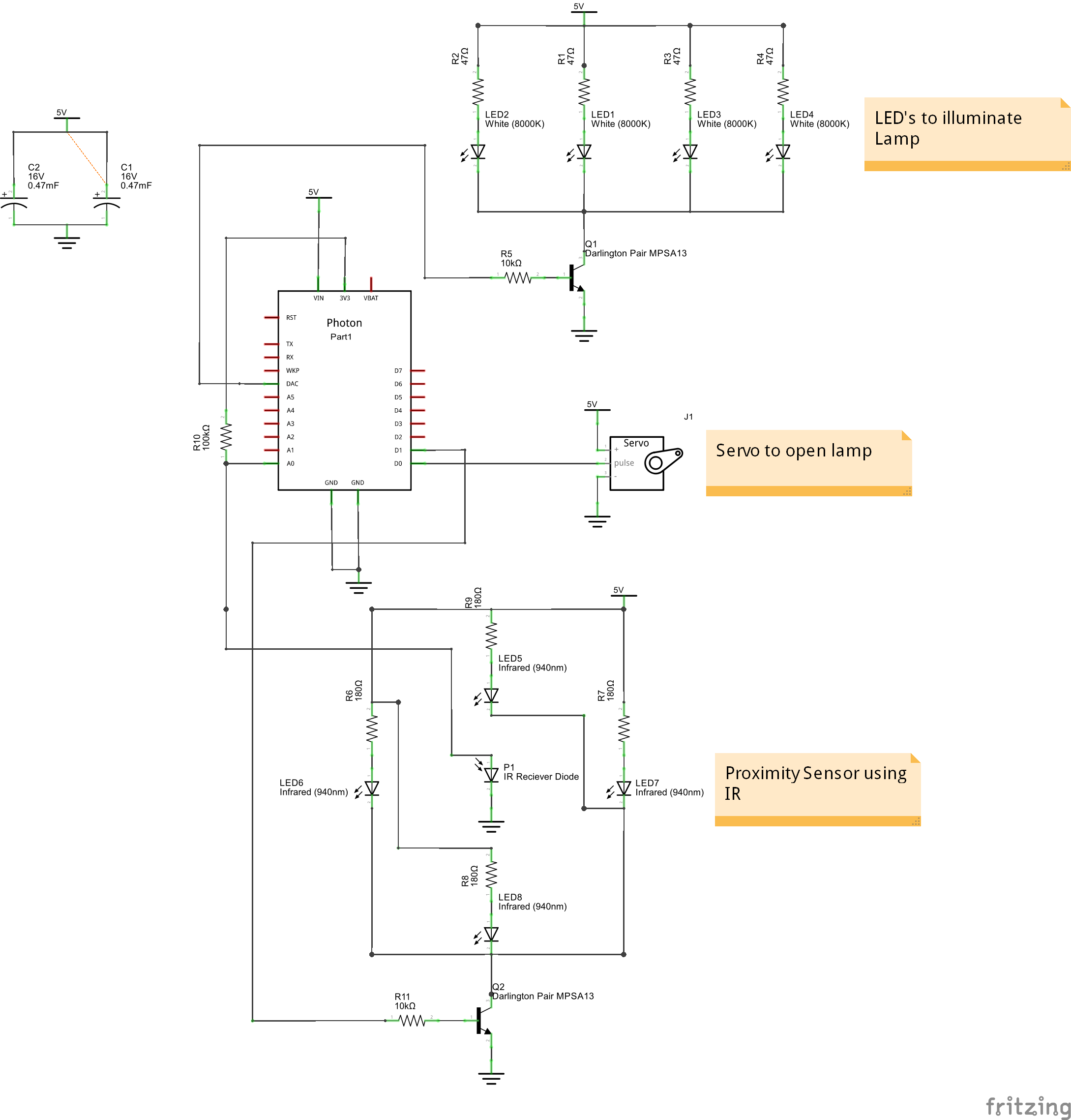
First step was to think of everything I needed to make this work, I settled on an IR proximity sensor, a servo for the movement and some super-bright white LED's for the light.
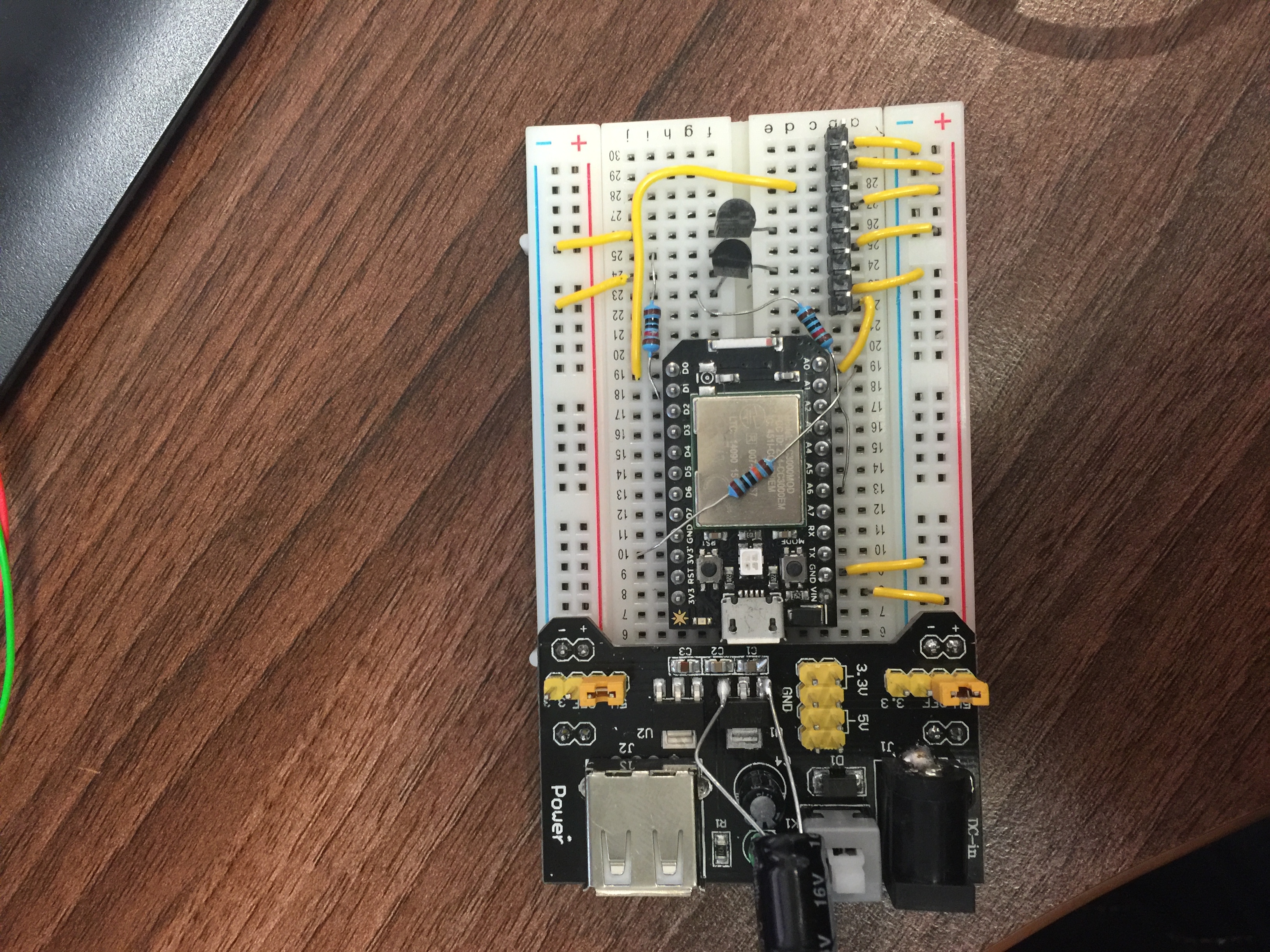
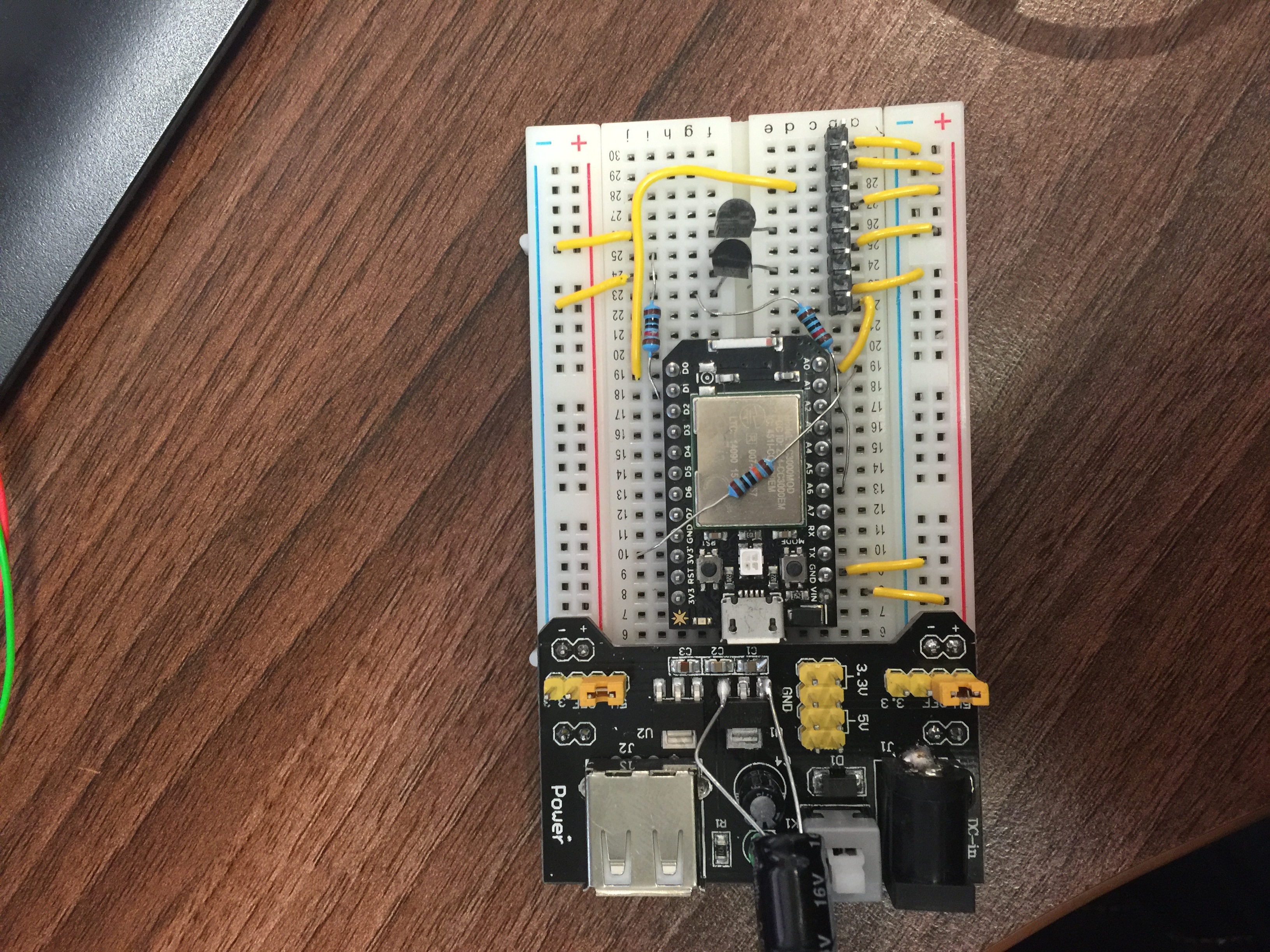
Finished Bread Boarded Holocron electronics
Firstly I prototype the electronics on the breadboard and fleshed out all the details in the code. It works! this was obviously a relief.
Once all the code and circuitry had been proven it was time to begin printing the enclosure.
I chose to use gold as this is a traditional Holocron material, the enclosure is designed to be press fit together, meaning there is hardly any need for support structure when printing.
The printing begins!
Total printing time ran into about 30 hours, so best leave plenty of time!
Once I had the main enclosure parts printed it was time to customize the electronics and build them in.
1 / 11 • Firstly added the IR LED's using the holes as a guide
1 / 9 • add the suoer bright LED's as shown, cathodes in the centre
1 / 7 • i tidied up the bread board to keep things neat
final assembly testing
first assembly testing
1 / 7 • final parts added, side and blue lenses
Not only will the Holocron work with the force...
...it also works as an IoT device for those not as strong in the force
holocron IoT web interface
1 / 7 • completed Holocron lamp
Hope you like this little project, any comments / feedback welcome!
Here's the fusion 360 model of the enclosure, this is designed to press fit together, but a drop of superglue can be added to make it a little more permanent
https://myhub.autodesk360.com/ue299db70/shares/public/SHabee1QT1a327cf2b7a8eeea6ffeb49753e
Holocron STL files
Use these pre-prepared STL files for 3D printing
Schematics
Holocron Schematics
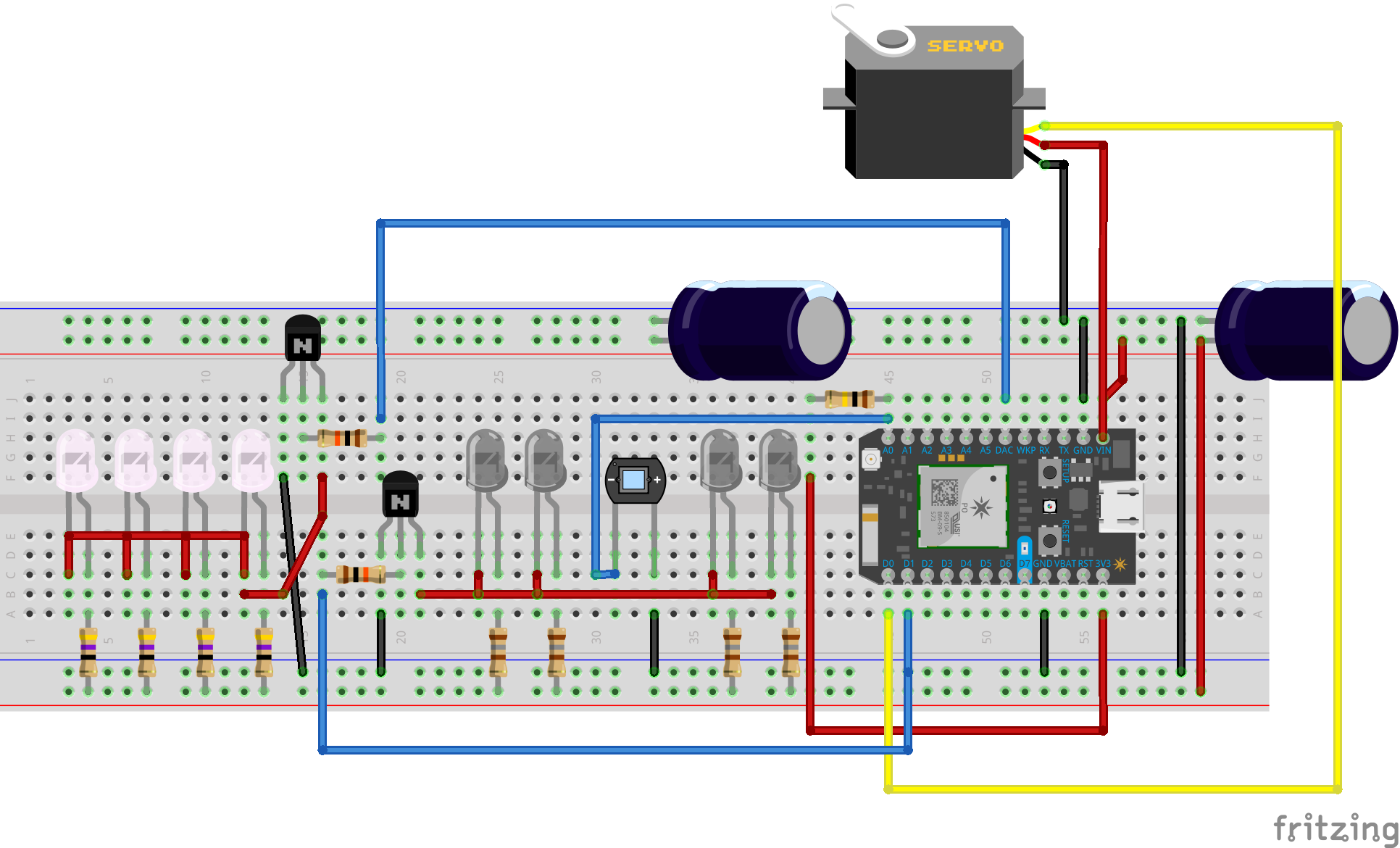
Holocron Breadboard example
Photograph of the final Breadboard layout
copy this is you want your breadboard to look pretty!
Load onto Particle by you prefered means! wave like a Jedi and you're done
/*Holocron Particle Firmware V1.0Dave Clarke18/02/16IR Proximty circuit modified from instructableshttp://www.instructables.com/id/Simple-IR-proximity-sensor-with-ArduinoAll other rights reserved.*/intreadIR();// prototypevoidServoControl();// prototypevoidServoControlReset();// prototypeServomyservo;// Create servo objectbooltoggle=false;// Used as a one shotboolTheForce=false;// Variable to know cloud function used.boolpowerON=true;// initial start up flagintpos=0;// initial servo positionintIRemitter=D1;// IR Emiter LED on D1intIRpin=A0;// IR Photodiode on pin A0intambientIR;// variable to store the IR coming from the ambientintobstacleIR;// variable to store the IR coming from the objectintvalue[10];// variable to store the IR valuesintdistance=0;// variable that will tell if there is an obstacle or notintmainLED=A6;// control for the main lightsintclosed=20;// Servo closed angleintopen=155;// servo open anglevoidsetup(){// Initialise pin modes and assign servo pinmyservo.attach(D0);pinMode(mainLED,OUTPUT);pinMode(IRemitter,OUTPUT);// Debug - Variables published to Cloud VariablesParticle.variable("distance",distance);Particle.variable("ambientIR",ambientIR);Particle.variable("obstacleIR",obstacleIR);// Cloud function interfaceParticle.function("force",RemoteSwitch);//initial statesdigitalWrite(mainLED,LOW);digitalWrite(IRemitter,LOW);myservo.write(closed);}voidloop(){distance=readIR(10);// Read value from IR sensor and store in distance Variableif((distance>15||TheForce==true)&&toggle==false)// open up lamp and turn on the lights{for(pos=closed;pos<=open;pos++)// goes from 5 degrees to 115 degrees{// in steps of 1 degreeServoControl(pos);// Set Servo Position and Control LED Brightness}ServoControlReset();// When finished, reset variables etc.}if((distance>15||TheForce==true)&&toggle==true)// turn off lamp and close{for(pos=open;pos>closed;pos--)// goes from 115 degrees to 5 degrees{ServoControl(pos);// Set Servo Position and Control LED Brightness}ServoControlReset();// When finished, reset variables etc.}}// Function to read IR Proximity sensorintreadIR(inttimes){for(intx=0;x<times;x++){digitalWrite(IRemitter,LOW);// turning the IR LEDs off to read the IR coming from the ambientdelay(1);// minimum delay necessary to read valuesambientIR=analogRead(IRpin);// storing IR coming from the ambientdigitalWrite(IRemitter,HIGH);// turning the IR LEDs on to read the IR coming from the obstacledelay(1);// minimum delay necessary to read valuesobstacleIR=analogRead(IRpin);// storing IR coming from the obstaclevalue[x]=ambientIR-obstacleIR;// calculating changes in IR values and storing it for future average}for(inty=0;y<times;y++){distance+=value[y];// calculating the average based on the "accuracy"}if(powerON==true){delay(1000);// prevent bogus readings from servo noise on power uppowerON=false;}else{//no start up delay}return(distance/times);// return the final value}// Function for Cloud Variable Remote SwitchboolRemoteSwitch(Stringcommand){if(command=="theforce"){returnTheForce=true;}}// Servo position control and LED brightnessvoidServoControl(intServoPosition){intLEDmap=ServoPosition;LEDmap=map(LEDmap,closed,open,0,255);// Map servo position to LED brightnessmyservo.write(ServoPosition);// tell servo to go to position in variable 'pos'delay(26);// waits 25ms for the servo to reach the positionanalogWrite(mainLED,LEDmap);//ramp light on using PWM Pin}// After servo has reached final position, reset variables and wait.voidServoControlReset(void){toggle=!toggle;// toggle switch stateTheForce=false;// Toggle The Force when using could remote switch ondistance=0;// reest distance to stop accidental operationif(toggle==false)// Make sure LED is High for open and low for closed{digitalWrite(mainLED,LOW);}else{digitalWrite(mainLED,HIGH);}delay(1000);// prevent operation too quickly}
Simple web interface to turn the Holocron on and off
HTML
Want to turn you light off but you're on the other side of the world? use this!
<!DOCTYPE html><html><bodystyle=""><imgsrc="assets/Holocron_mk_1_2016-Feb-12_12-06-42PM-000_CustomizedView39472378.jpg"class="gwd-img-15tm"><divclass="gwd-div-lpay"style=""><centerclass="gwd-center-1pot"><br><br><br><formaction="https://api.particle.io/v1/devices/<insert device ID here>/force?access_token=<insert token access key here>"method="POST"><br><br><inputtype="hidden"name="args"value="theforce"><br><inputtype="submit"value="Use the Force"></form></center></div></body></html>








_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)









{kind=link}
{kind=link}
{kind=link}
Comments