// Somfy Receiver
// Set the pin that receives data from your 433.42 Mhz Receiver
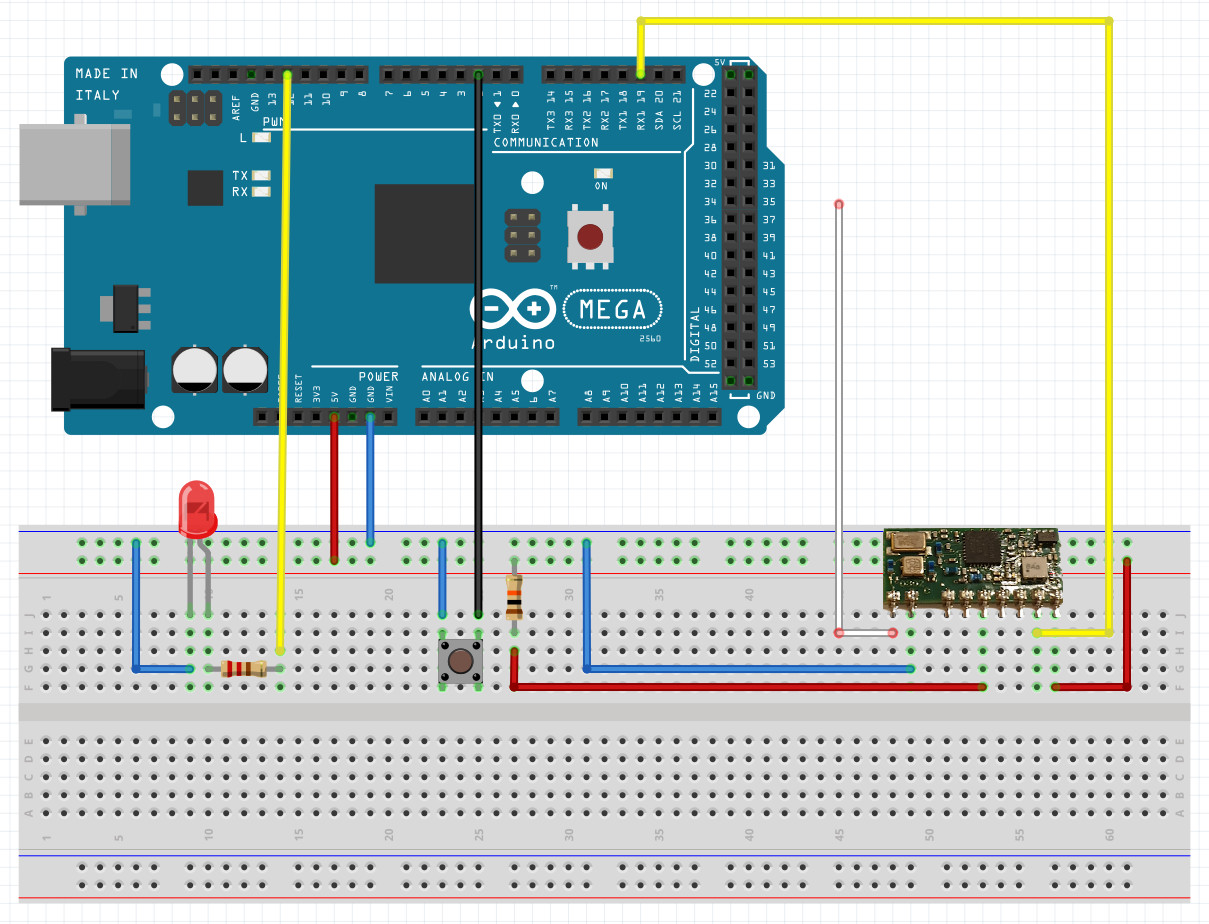
#define TRANSCEIVER_RX_PIN 19
// Aurel transceivers have a pin that let the hardware switch to RX and TX mode
#define TRANSCEIVER_MODE_PIN 15
// Maximal remotes stored in the receivers eeprom
#define MAX_REMOTES 16
// Aurel transceivers have a pin that must be set to HIGH to enable the transmitter
#define TRANSCEIVER_ENABLE_PIN 22
// Auto switch off timer in seconds, set to 0 to disable.
#define SWITCH_OFF_SECONDS 3600
// set the pins for the led that lights up when the device is switched on and the led that lights up when programming mode is enabled
#define LED_ONOFF 13
#define LED_PROG 12
#define PROG_BUTTON 2
// the output pin to control your relay to switch on or off your device
#define PIN_DEVICE 14
#include <EEPROM.h>
// DO NOT CHANGE THESE SETTINGS BELOW
#define TRANSCEIVER_TX HIGH
#define TRANSCEIVER_RX LOW
int state = 0; // status got increased during receiving radio signals. on state 3 we are ready to receive the payload data
bool halfway = false; // Boolean is set if a statechange occurs at the start of a new bit. We then still have to wait for a falling or rising edge
int bits = 0; // counter for the received payload bits
uint8_t frame[7]; // payload buffer
uint8_t lastFrame[7]; // last received payload buffer, used to recognize repeated frames
struct Remote
{
uint8_t rollingCode[2]; // the current rolling code
uint8_t address[3]; // the address of the remote
};
int remoteCount = 0; // number of known remotes stored in the eeprom
Remote remotes[MAX_REMOTES]; // initialize an array for the maximum remotes stored in the eeprom
bool progModeEnabled = false; // Boolean that will be set to true if programming mode is enabled to add or delete a remote
int progModeSeconds = 0; // Programming mode seconds counter. If counter hits 60 seconds programming mode will be terminated
bool switchedOn = false; // Boolean that will be set to true if the device is switched on
int switchedOnSeconds = 0; // Seconds counter. If counter hits SWITCH_OFF_SECONDS seconds the device will be switched off
bool progButtonPressed = false;
unsigned long progButtonMillis = 0;
unsigned long resetButtonMillis = 0;
/*
* the setup function runs once when you press reset or power the board
*/
void setup()
{
// set the Aurel transceiver to RX mode
pinMode(TRANSCEIVER_MODE_PIN, OUTPUT);
digitalWrite(TRANSCEIVER_MODE_PIN, TRANSCEIVER_RX);
// initialize digital pin LEDs and device as an output.
pinMode(LED_ONOFF, OUTPUT);
pinMode(LED_PROG, OUTPUT);
pinMode(PIN_DEVICE, OUTPUT);
// PROGRAM BUTTON
pinMode(PROG_BUTTON, INPUT_PULLUP);
// enable Aurel transmitter
pinMode(TRANSCEIVER_ENABLE_PIN, OUTPUT);
digitalWrite(TRANSCEIVER_ENABLE_PIN, HIGH);
delay(500);
// start serial communication
Serial.begin(115200);
Serial.println("\n\t=======================================");
Serial.println("\tSomfy RTS receiver on the Arduino Mega.");
Serial.println("\t======================================\n");
// load previous programmed remotes from the eeprom
loadRemotes();
showRemotes();
showHelp();
Serial.println("\tReceived frames:\n");
// assign an interrupt on pin x on state change
pinMode(TRANSCEIVER_RX_PIN, INPUT);
attachInterrupt(digitalPinToInterrupt(TRANSCEIVER_RX_PIN), stateChange, CHANGE);
// setup two different timers
noInterrupts(); // disable all interrupts
setupTimer1();
setupTimer3();
interrupts(); // enable all interrupts
}
/*
* the loop function runs over and over again forever
*/
void loop() {
// read input from serial monitor
if (Serial.available() > 0) {
parseSerial((byte)Serial.read());
}
// if the hardware prog button is pressed
if(digitalRead(PROG_BUTTON) == LOW) {
// if the hardware prog button was already pressed
if(progButtonPressed) {
// check if the current time is equal to the time stored in progButtonMillis
if(millis() == progButtonMillis) {
Serial.println("Programming mode. Add or delete a remote by pressing the PROG button on the remote\n");
setProgMode(true);
}
// check if the current time is equal to the time stored in resetButtonMillis
if(millis() == resetButtonMillis) {
Serial.println("Reset. All programmed remotes are now deleted\n");
remoteCount = 0;
saveRemotes();
setProgMode(false);
// blink PROG LED three times
for(int i = 0 ; i < 3 ; i++) {
delay(250);
digitalWrite(LED_PROG, HIGH);
delay(250);
digitalWrite(LED_PROG, LOW);
}
}
} else { // if the hardware prog button wasn't pressed yet
progButtonPressed = true;
progButtonMillis = millis() + 2500; // 2.5 seconds delay
resetButtonMillis = millis() + 30000; // 30 seconds delay
}
} else {
progButtonPressed = false;
}
}
/*
* Timer1 is used to measure the time elapsed between the pulse changes while receiving the payload.
*
* We use 16mhz cpu / prescaler 8 = 2.000.000 counts per second (Hz).
* If we divide the counts by 2 then we have the microseconds: 16000000 / 8 / 2 = 1000000
*
* And we set an overflow interrupt that we use as a timeout. So when the timer overflows the data is stated as corrupt and
* the payload capture will be aborted.
*/
void setupTimer1()
{
TCCR1A = 0; // set entire TCCR1A register to 0
TCCR1B = 0; // same for TCCR1B
TCNT1 = 0; // set counter to zero
TCCR1B |= (1 << CS11); // 8 prescaler
TIMSK1 |= (1 << TOIE1); // enable overflow interupt
}
/*
* interupt service routine called when timer1 overflows which indicates corrupt data
*/
ISR(TIMER1_OVF_vect) { // Interrupt service run when Timer/Counter1 OVERFLOWs
state = 0; // reset
}
/*
* With timer3 we will count seconds. This seconds are used for two different clocks.
*
* 1. time out after one minute in programming mode if no new remote with PROG button is received
* 2. time out after one hour after switch is turned on to switch it off automaticly
*
* We use 16mhz cpu / prescaler 1024 - 1 = 15624 counts per second (Hz).
*
* And we set an timer compare interrupt so that we can count seconds if the counter hits the number of 15624.
*/
void setupTimer3()
{
// set timer interupt for each second
TCCR3A = 0; // set entire TCCR3A register to 0
TCCR3B = 0; // same for TCCR3B
// set compare match register to desired timer count
OCR3A = 15624;
// turn on CTC mode:
TCCR3B |= (1 << WGM12);
// Set CS30 and CS32 bits for 1024 prescaler:
TCCR3B |= (1 << CS30) | (1 << CS32);
// enable timer compare interrupt:
TIMSK3 |= (1 << OCIE3B);
}
/*
* interupt service routine called on every second. Used for two long term timers
*/
ISR(TIMER3_COMPB_vect)
{
// keep programming mode for a maximum of 60 seconds
if(progModeEnabled) {
progModeSeconds++;
if(progModeSeconds >= 60) {
setProgMode(false);
}
}
// automatic turn off the device after SWITCH_OFF_SECONDS seconds
if(switchedOn) {
switchedOnSeconds++;
if(SWITCH_OFF_SECONDS && switchedOnSeconds >= SWITCH_OFF_SECONDS) {
toggleSwitch(false);
}
}
}
/*
* Handle available commands on the serial monitor
*/
void parseSerial(byte button)
{
// do not accept buttons that are under ascii 20
if(button < 20) {
return;
}
// accept uppercase too
if(button >= 65 && button <= 90) {
button += 32;
}
switch (button) {
case 'r' :
Serial.println("Reset. All programmed remotes are now deleted\n");
remoteCount = 0;
saveRemotes();
break;
case 'p' :
Serial.println("Programming mode. Add or delete a remote by pressing the PROG button on the remote\n");
setProgMode(true);
break;
case '1' :
Serial.println("On. The device is switched on and will automaticly switched off after one hour\n");
toggleSwitch(true);
break;
case '0' :
Serial.println("Off. The device is off.\n");
toggleSwitch(false);
break;
case 'l' :
showRemotes();
break;
case 'h' :
showHelp();
break;
default:
Serial.println("Unknown command. Available commands are R for Reset, P for Programming a new remote, 1 and 0 for On and Off\n");
toggleSwitch(false);
break;
}
}
/*
* this function will be called on every falling or rising edge from the receivers RX pin
*
* It changes the state if new data starts
*
* state 0: Idle
* state 1: Hardware sync received
* state 2: Software sync received
* state 3: Receiving data which will be processed if we received 56 bits
*/
void stateChange() {
int val = digitalRead(TRANSCEIVER_RX_PIN);
int tm = TCNT1 / 2;
switch (state) {
case 0: // found a hardware sync HIGH - Goto state 1
if(inRange(tm, 2416) && val == LOW) {
state = 1;
}
break;
case 1: // found a hardware sync LOW - Goto state 2
if(inRange(tm, 2416) && val == HIGH) {
state = 2;
}
break;
case 2: // found a software sync! - Goto state 3 - Ready to receive the bites
if(inRange(tm, 4750) && val == LOW) {
state = 3;
bits = 0;
}
break;
case 3: // receiving payload
int b = bits / 8;
if(inRange(tm, 604)) {
if(halfway) {
bitWrite(frame[b], 7 - bits % 8, val);
bits++;
halfway = false;
} else {
halfway = true;
}
} else {
bitWrite(frame[b], 7 - bits % 8, val);
bits++;
}
if(bits == 56) {
state = 0;
if(!isRepeatedFrame()) {
memcpy(&lastFrame[0], &frame[0], 7);
processFrame();
}
}
break;
default:
state = 0;
break;
}
TCNT1 = 0;
}
/*
* after we have received 56 bits (or 7 bytes) of data we will process it
*/
void processFrame()
{
// unscramble
unscrambleFrame(frame);
int btn = getCommand(frame); // which button is pressed on the remote?
Remote r; // initialize a new remote object and copy the received data in it
memcpy(&r, &frame[2], 5);
int index = findRemoteWithAddress(r); // try to find a remote in our list with the same address. Will be -1 if it is an unknown remote
Serial.print("\tData (payload): "); // print received data on the serial monitor
printHex(frame, 7);
Serial.print("\tCommand: ");
Serial.print(btn);
Serial.print("\tRolling code: ");
Serial.print(getRollingCode(r));
if(calculateChecksum(frame) != 0) {
Serial.println("\tChecksum mismatch!");
return;
}
switch(btn) {
case 8: // PROG button
if(progModeEnabled) {
if(index == -1) {
if(addRemote(r)) {
Serial.print("\tAction: New remote added!");
} else {
Serial.print("\tERROR: No space available for new remote!");
}
} else {
deleteRemote(index);
Serial.print("\tAction: Remote deleted!");
}
setProgMode(false);
}
break;
case 1: // MY button
if(index >= 0 && isRollingCodeValid(index, r)) {
Serial.print("\tAction: MY");
}
break;
case 2: // UP button
if(index >= 0 && isRollingCodeValid(index, r)) {
Serial.print("\tAction: ON");
toggleSwitch(true);
}
break;
case 4: // DOWN button
if(index >= 0 && isRollingCodeValid(index, r)) {
Serial.print("\tAction: OFF");
toggleSwitch(false);
}
break;
}
Serial.println("\n");
}
/*
* When a frame has been received it is scrambled. This function decodes the received frame
*/
void unscrambleFrame(uint8_t* frame)
{
uint8_t temp[7];
memcpy(temp, frame, 7);
// unscramble
for (int i=1; i < 7; i++) {
frame[i] = temp[i] ^ temp[i-1];
}
}
/*
* After that a frame has been decoded we could calculate the checksum which should be always zero on received frames.
*/
uint8_t calculateChecksum(uint8_t *frame)
{
// Checksum calculation: a XOR of all the nibbles
byte checksum = 0;
for (byte i = 0; i < 7; i++) {
checksum = checksum ^ frame[i] ^ (frame[i] >> 4);
}
return checksum & 0b1111; // We keep the last 4 bits only
}
/*
* Compare received frames to avoid repeations
*/
bool isRepeatedFrame()
{
for(int i = 0; i < 7 ; i++) {
if(frame[i] != lastFrame[i]) {
return false;
}
}
return true;
}
/*
* We count micro seconds between RX state changes but it doesn't need to be precise and may be 150 micros less or over
*/
bool inRange(int tm, int ms) {
return tm > ms-150 && tm < ms+150;
}
/*
* get the command (pressed button(s)) out of the data
*/
int getCommand(uint8_t* frame) {
return frame[1] >> 4;
}
/*
* add a new remote to the remotes array and save it to the eeprom
*/
bool addRemote(Remote newRemote)
{
if(remoteCount >= MAX_REMOTES - 1) {
return false;
}
remotes[remoteCount++] = newRemote;
saveRemotes();
return true;
}
/*
* Delete a remote from the remotes array and save the array to the eeprom
*/
void deleteRemote(int index) {
if(index < remoteCount-1) {
for(int i = index + 1 ; i < remoteCount ; i++) {
memcpy(&remotes[i-1], &remotes[i], 5);
}
}
remoteCount--;
saveRemotes();
}
/*
* check if remote is already in the remotes array and return remote index or -1
*/
int findRemoteWithAddress(Remote r) {
for(int i = 0 ; i < remoteCount ; i++) {
if(memcmp(&r.address[0], &remotes[i].address[0], 3) == 0) {
return i;
}
}
return -1;
}
/*
* check if a rolling code is valid. The remote may be 25 presses before the receiver
* Also save the remotes to the eeprom again to update the rolling code there
*/
bool isRollingCodeValid(int index, Remote r)
{
if(getRollingCode(r) - getRollingCode(remotes[index]) < 25 ||
(getRollingCode(r) +100) - (getRollingCode(remotes[index]) +100) < 25) { // in case of overflow
memcpy(&remotes[index].rollingCode[0] , &r.rollingCode[0], 2);
saveRemotes();
return true;
}
return false;
}
/*
* get the rolling code into an unsigned integer so that we can increase and compare the rolling codes
*/
unsigned int getRollingCode(Remote r)
{
unsigned int rollingCode;
memcpy(&rollingCode, &r.rollingCode[0], 1);
rollingCode = rollingCode << 8;
memcpy(&rollingCode, &r.rollingCode[1], 1);
return rollingCode;
}
/*
* Load the remotes array from the eeprom
*/
void loadRemotes() {
EEPROM.get(0, remoteCount);
for(int i = 0 ; i < remoteCount ; i++) {
EEPROM.get(2 + i * sizeof(Remote), remotes[i]);
}
}
/*
* Save the remotes array to the eeprom
*/
void saveRemotes() {
EEPROM.put(0, remoteCount);
for(int i = 0 ; i < remoteCount ; i++) {
EEPROM.put(2 + i * sizeof(Remote), remotes[i]);
}
}
/*
* Enable or disable the programming mode
*/
void setProgMode(bool mode) {
progModeSeconds = 0;
progModeEnabled = mode;
digitalWrite(LED_PROG, mode);
}
/*
* Switch the device on or off
*/
void toggleSwitch(bool on) {
switchedOnSeconds = 0;
switchedOn = on;
digitalWrite(LED_ONOFF, on);
digitalWrite(PIN_DEVICE, on);
}
/*
* help function to print hexadecimal values on the serial monitor with leading zeros
*/
void printHex(uint8_t* bytes, int len) {
for (byte i = 0; i < len; i++) {
if (bytes[i] >> 4 == 0) { // Displays leading zero in case the most significant nibble is a 0.
Serial.print("0");
}
Serial.print(bytes[i], HEX); Serial.print(" ");
}
}
/*
* show information about the remotes
*/
void showRemotes()
{
Serial.print("\tNumber of remotes in memory: ");
Serial.print(remoteCount, HEX);
Serial.println("\n");
for(int i = 0 ; i < remoteCount ; i++) {
Serial.print("\tRemote ");
Serial.print(i+1);
Serial.print(":\tAddress: ");
printHex(remotes[i].address, 3);
Serial.print("\tRolling code: ");
printHex(remotes[i].rollingCode, 2);
Serial.println("");
}
Serial.println("");
}
/*
* show help information
*/
void showHelp()
{
Serial.println("\tAvailable commands:\n");
Serial.println("\t1:\t Switch the device on");
Serial.println("\t0:\t Switch the device off");
Serial.println("\tP:\t Enter programming mode to add a new receiver");
Serial.println("\tL:\t List the remotes stored in the eeprom");
Serial.println("\tH:\t Show this help list");
Serial.println("\tR:\t Reset the receiver. Be carefull, all remotes will be deleted!\n\n");
Serial.println("\tPROG button:\n");
Serial.println("\tpress 2.5 seconds:\t Enter programming mode to add a new receiver");
Serial.println("\tpress 30 seconds:\t Reset the receiver. Be carefull, all remotes will be deleted!\n\n");
}


















{kind=link}
Comments
Please log in or sign up to comment.