


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
Okay and Hello,
So...you want your MaxBotix EZ to run well and run with terminal output. Nice!
...
Me too!
Luckily, for the both of us, this has been done before and will be done here again.
Okay, so, to start out, we first need to solder on our pins to the EZ range finder sensor.
Get an image for your board, the BeagleBone Black Wireless, which can be found online at https://beagleboard.org/getting-started. You might need a SD Card, etcher imaging software, and a host computer/development desktop.
...
Hopefully, by now we have an image on the BeagleBone Black Wireless, we have our six pins for the EZ soldered on, and we can now move on to the next treat.
Wiring up this bad boy is an awesome experiment for anyone, like me, who is having trouble setting wires correctly in zero minus 10, 9, 8, 7, 6, 5, 4, 3,...,...,....
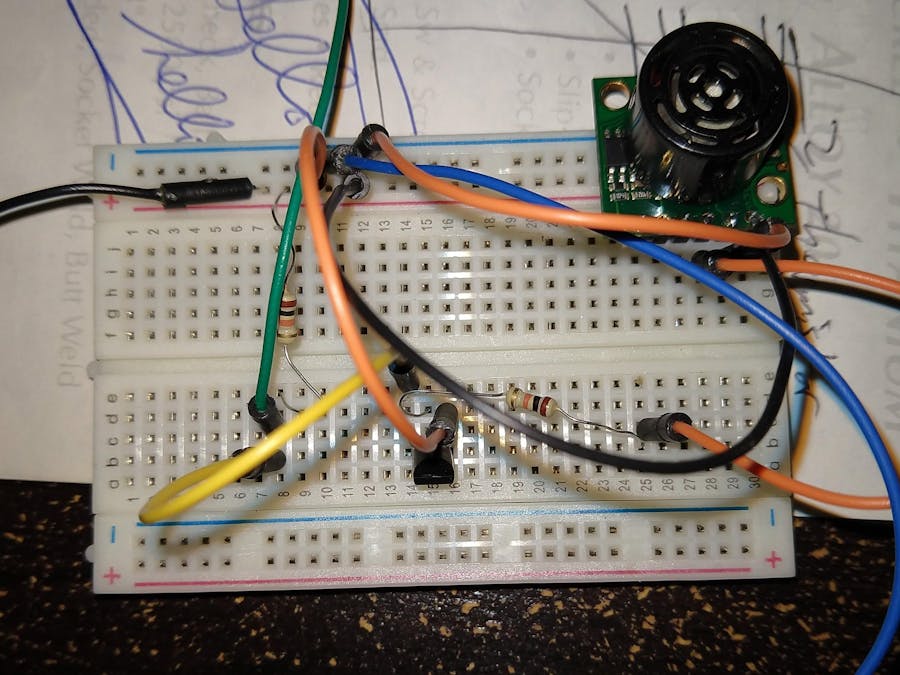
Okay. So, you can see this set up on a real photograph, like on the main page to this little diddy, and on this schematic that was drawn up by a person on Freenode #beagle.
Oh...side note: Get your datasheet! https://www.maxbotix.com/Ultrasonic_Sensors/MB1020.htm.
That is the BJT, two 1k ohm resistors, and some leads along w/ the MaxBotix EZ2 range finder.
At first, this setup was very complicated to me but after a bit, I figured out that the set up needed a breadboard that "worked!" Believe it or not, my breadboard was faulty the entire time I was asking questions, looking for answers, and researching ideas.
It was a first! It was not actually me! So, in hindsight, get nice breadboards for your wiring endeavors.
Oh...here is another photo for ideas on how to connect your BBBW to the MaxBotix rangefinder!
and...
The Final wiring setup looks a bit like this idea:
Right now, I am testing the source in the above photo. So, w/ these source codes, you can test w/ your hand, the dog, and/or mailman when he/she drives by to deliver mail.
Just make sure you have the terminal for seeing your output and some power source for your BBBW, e.g. preferably a laptop or desktop.
Seth
P.S. If you know of any better ideas, please let me know. I am always on the search for more source w/ MaxBotix EZ2s. Oh! Do not forget to use config-pin to set up the RX of your choice for your UART. So, for instance, this command will work!
config-pin p9.22 uart



{kind=link}
Comments
Please log in or sign up to comment.