I would like to thank DFRobot for sponsoring this project.
Previous ProjectBack in August of 2017, I imagined a device that could alert users if one of their loved ones experienced a fall or pressed a “panic” button. It used an ESP8266 and was assembled on a piece of perf-board. It had a single LED that would indicate if a fall had occurred. The device also featured a very basic LiPo charging circuit that had no indicators.
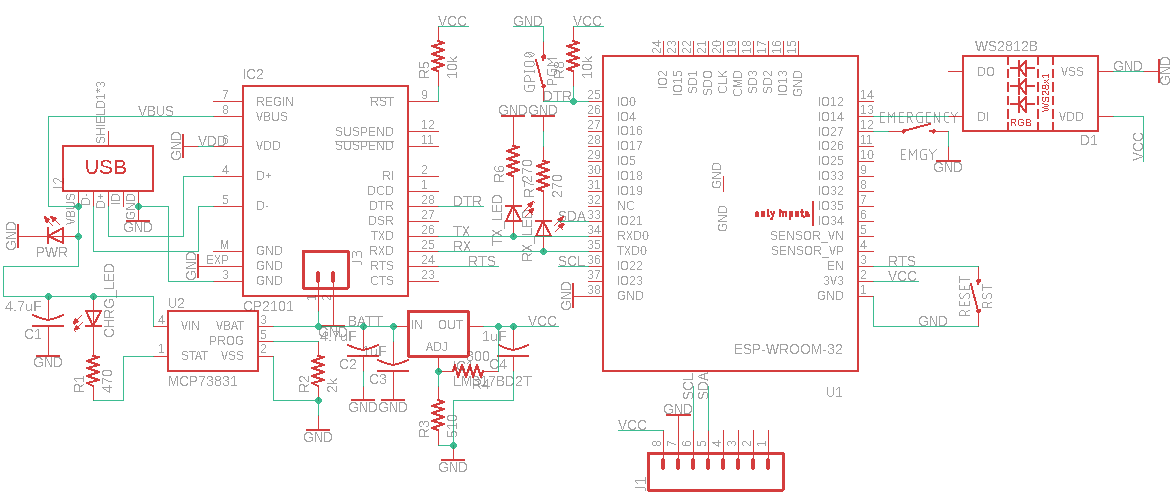
New IdeaSince my last fall detector was so rudimentary, I wanted to make drastic improvements. The first one was making it USB programmable, so I used a CP2102 USB to UART converter IC to handle the USB to UART serial connection.
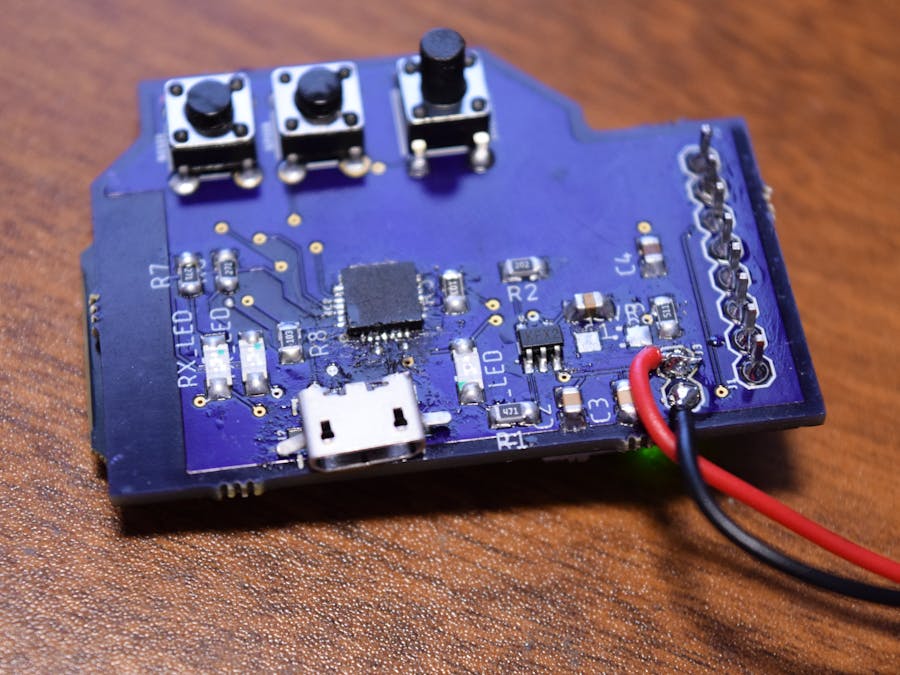
I also wanted there to be more indications of the operations, so I added an LED for charging, one for power, and two for the USB status. I chose to use an ESP32 due to its increased power and Bluetooth connectivity, which can allow for future expansion, such as an accompanying app.
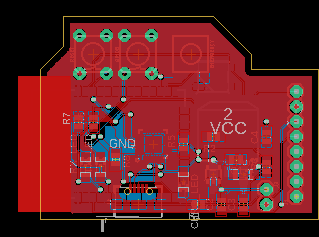
PCB DesignAll these new features would require a lot of additional circuitry, and a simple piece of perf-board would not cut it. This required a PCB, which I designed in EagleCAD. I began by laying out the connections with their schematic editor. Then I moved onto making the actual board and traces.
SolderingThis was the most difficult part because of the fine-pitched pins. The hardest component to solder was the CP2102, which comes in a QFN-28 package. Each pin is just.5mm apart, and without a stencil, this was fairly tricky to attach. I solved this problem by applying a generous amount of liquid flux to the pads and then running a small amount of solder over the pins.
UsageThe device works by checking the acceleration measured by the MPU6050 at set intervals. Once it detects a fall, it sends an email to a set contact. I have found out that the battery lasts about three days, so it must be charged regularly. There is also a button that is connected to a hardware interrupt that can send an email when pressed.





_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)







{kind=link}
{kind=link}
Comments