

Hardware components | ||||||
| × | 4 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
This project is about how to create extendable robotics in easy DIY way. The idea came from building blocks that allow to build different forms with just a few simple blocks. The question was that how to apply and control movement with building blocks.
Opened a free DEMO controller to control maximum 6 servos with a mobile user interface. http://gigabrain.io/demo/standalonedemo.html We have done initial testings for the controller with Microsoft's backed up IoT Forge. Looking forward also for your feedback.
Vorpal robotics has made an excellent 3D-printable Hexapod robot that is extended in this project.
The Vorpal hinge and leg system is extended by adding different kinds of forms that allow easy connections without any tools.
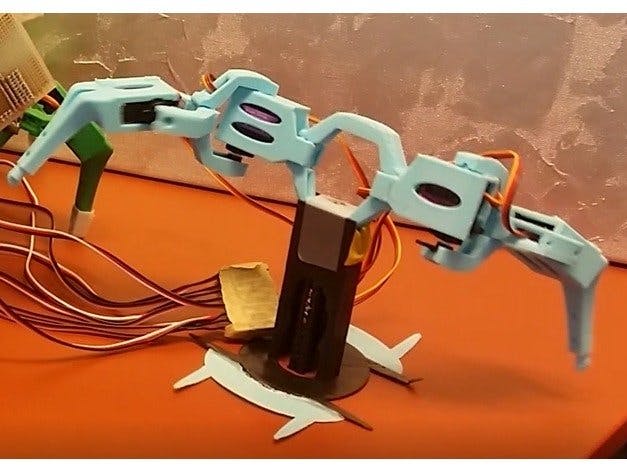
Here's an example of a simple form controlled with 3 servos.
Movement example with a Raspberry Pi controller.
3D ModelsThe parts consist of the following 3d models:
The hinge part connects to a servo horn and to another building block connector or another hinge. https://www.thingiverse.com/download:4752889
The connector part attaches the servo to another building block. https://www.thingiverse.com/download:4752888
Servo leg gives the movement a torque. https://www.thingiverse.com/download:4752890
These hinges give a more movement freedom and allow a servo attachment to the axis. https://www.thingiverse.com/download:4756669
This addition is a Case that can be connected with hinges. Case can hold a 9V Battery with a UBEC, a Raspberry Pi Zero or a PCA9685 board.
You can connect the case with a leg structure and stack two cases on top of each others. Note that with the structure you could have multiple battery or PCA cases between leg structures.
All the downloadable 3d models and sets with multiple printable models are found here:
With these simple forms you can build a larger moving robotic system with multiple servos using the PCA9685 and a Raspberry Pi controller.






Comments