_acZFf9y0XS.gif?auto=format%2Ccompress&gifq=35&w=400&h=300&fit=min)

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
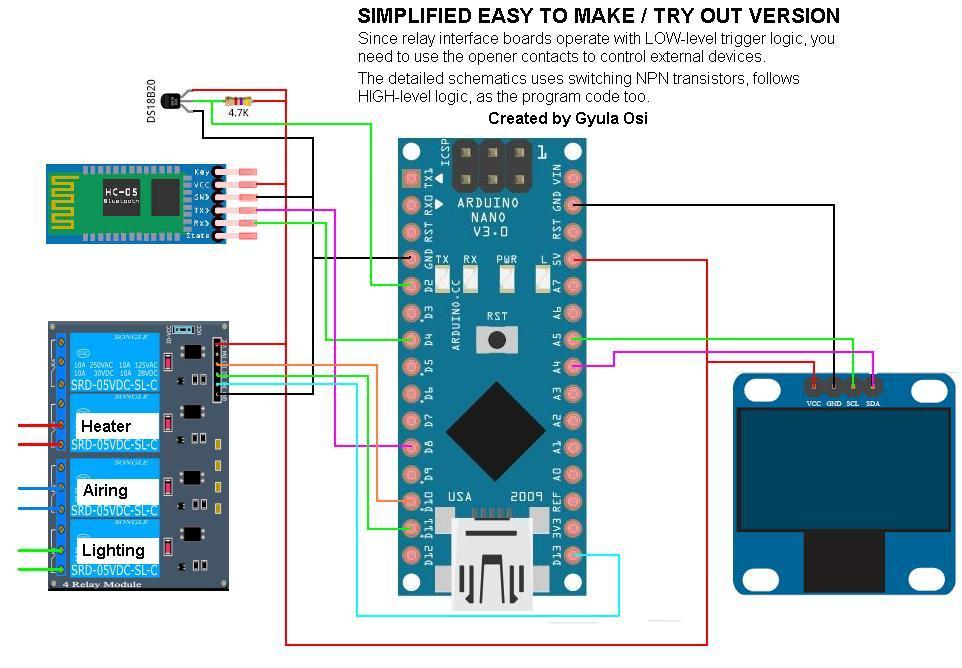
Simple but useful DIY Arduino Thermostat project with Bluetooth.
An intelligent thermostat routine controls the heater gas boiler, and the system switches my kitchen lights and my bathroom airing fan with relays – can be controlled by buttons and Android device or computer via Bluetooth. Celsius and Fahrenheit version also available! All parts are handmade.
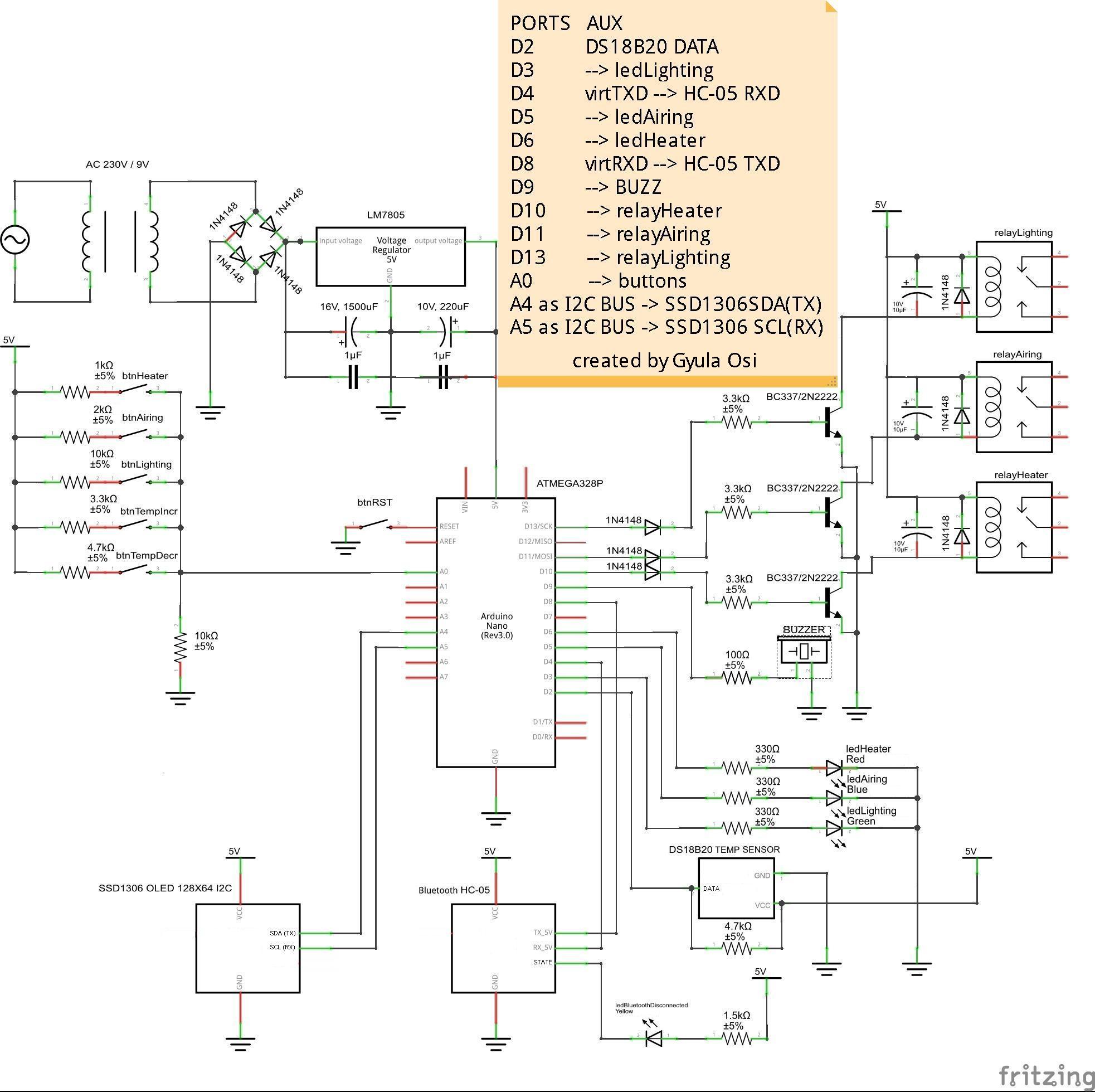
Developed on Arduino Nano (or higher) board, uses Dallas DS18B20 temperature sensor, HC-05/06 Bluetooth adapter, I2C 128X64 bicolor OLED display– you can choose different LCD/OLED display, the u8glib supports a lot of types.
The video shows all the important working ways, gives you ideas how to build the project from the beginning.
1: One Time Heating (15 mins) timed mode, useful at spring/autumn evenings
2: Thermostat mode (higher priority), the adjusted target temperature stored in EEPROM memory
Boiler save algorithmFrequent, short-term switching would cut short the lifetime of the heater gas boiler, to keep avoid it, the program uses correction values – these declares the degree of overheating and cooling back. Lower temperature demands greater correction values, because the walls are colder and adsorb better the warmth from the freshly heated-up air, so the above described effect would stronger.
The program detects if a window is open, thus the temperature drops at least -0, 2°C (-0, 36F) in one minute – the heater stops or won’t start, and the airing fan will turn on in order to help refresh the air. When the air became warmer at least +0, 12°C (+0, 216F) due to the heat capacity of the environment, the system will switch back to normal mode, and the ‘Window Alert’ event will be dismissed.
Error detectionMeasured temperature under 0°C (32F) or above 40°C (104F) will be evaluated as malfunction or other problem (error, broken window, fire, etc.), and all devices will shut down.
Bluetooth communicationThe Android GUI app has 8 buttons, sends upper and lower case letters in order to turn on (‘A’), or turn off (‘a’) the timed heater, ‘B’ and ‘b’ turns the airing, ‘C’ and ‘c’ the lights…
The other strength of my project is the nerd-friend Bluetooth serial terminal usage. Just chat with the system via Bluetooth using a serial terminal – it can be an Android app, but even a normal PC will do – for example the Serial Monitor of the Arduino IDE.
The controller sends temperature reports in every minutes automatically, and instant reports about all events, such as an attached device has been turned on/off, the thermostat routine activated, and so on.
It accepts control codes and sends confirmation messages. My command structure based on two digit numbers like ‘XY’ – where;
‘X’ is the device code, and ‘Y’ is the opcode
30, 31, 32: lighting Off / On / flip logical state
40, 41, 42: airing Off / On / flip logical state
50, 51, 52: one time heater program Off / On / flip logical state
10 – 24 numbers will be accepted as target temperature for the thermostat function
‘r’ – report about working state of controlled devices
‘w’ – manually disables the “window alert” event, if you don’t want to wait for its automated dismission
‘A, a… H, h’ – letters are accepted as the GUI app would have sent
Fahrenheit versionI was converted all the correction variables, reference and ratio values, so the system kept its calculation and working particularities.
Only a few modification. The new device codes of the Fahrenheit version:
1 - Lighting (10: off, 11: on, 12: flip state)
2 - Airing
3 - Heater
50 - 76 numbers are target temperature values
The SequelUPDATE: a Full Home Automation System with Internal Bluetooth Link and Voice Control!
Libraries & LinksDallasTemperature, elapsedMillis, OneWire, SoftwareSerial, olikraus/u8glib
If you use different button resistors, or need to check A0 readings, I suggest to check this out:
http://blog.codebender.cc/2015/07/20/tutorial-multiple-buttons-on-1-analog-pin/
Thermostat v11 - Celsius version.ino
Arduino// Celsius version v1.1
// Program code of an intelligent Arduino smarthome thermostat solution,
// based on Arduino Nano (or higher) board, DS18B20 thermo sensor, HC-05 Bluetooth adapter, I2C 128X64 bicolor OLED display.
// The system can be controlled by buttons and Android smartphone via bluetooth.
//
// It handles the HEATER gas boiler, the bathroom AIRING ventilator and the kitchen LIGHTING - swithed with relays.
// The heater has two working ways. 1: One Time Heating (15 mins) timed mode, 2: Thermostat mode (higher priority). The adjusted target tempr.
// stored in EEPROM. The program detects hardware errors and window opening - in these cases the heater stops and/or will not start.
//
// Designed and programmed by Gyula Osi.
// All rights reserved.
// ------------------------------------------------------------------------------------------------------------------------------------
// ---- Display I2C Bus, SDA(TX) -> A4, SCL(RX) -> A5
#include "U8glib.h"
U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_NONE); // display constructor
byte frame = 0; // start logo pointer
// ---- Ports and related declarations
const byte buzzer = 9; // buzzer to D9
int btnVal; // stores analog values from buttons
const byte relayA = 11; // airing
bool aState = 0;
bool aStateByCmd; // if "window alert" is gone, the airing control goes back to the original state
const byte relayL = 13; // lighting
bool lState = 0;
const byte relayH = 10; // heater
const byte ledH = 6; // PWM ports allow output level adjustment used to change brightness
const byte ledA = 5;
const byte ledL = 3;
const byte bright[3] = {0, 10, 100};
byte brightHeat = bright[2];
#define ledInterval 1000 // heater led blinking interval
unsigned long prev = 0;
// ---- Strings for Display and Serial Reports
#define STATE_ITEMS 3 // device state indicator strings for outputs
// i -> 0 1 2
const String state_str[STATE_ITEMS] = {"on.", "off.", "auto."};
String heaterState;
String airingState;
String lightingState;
#define FUNCT_ITEMS 11
// i -> 0 1 2 3 4 5 6 7 8 9 10
String funct_str[FUNCT_ITEMS] = {"Heater is ", "Airing is ", "Lighting is ", "Window Alert!", "Hardware Error!", "Hit a Key >>", "or send a Code!", "Target tempr = ", "Temperature = ", " * ", " -"};
// ---- Temperature Measurement and Heater Related Features
#include <elapsedMillis.h>
elapsedMillis timer0; // 8-bit, PWM timer, used by function elapsedMillis()
#define sftyTmrInterval 15 * 60000 // one Time Heating (15 mins) timed mode interval [ms]
bool sftyTmrEnded; // boolean startup, the timer0 has ended
#include <EEPROM.h>
byte tTarget; // adjusted target tempr
const int addr = 0; // the current address of the tTarget variable in the EEPROM memory
bool hState = 0; // heater boolean state
bool hThermostat = 0; // thermostat boolean state
#include "OneWire.h"
#include "DallasTemperature.h"
#define DS18B20 2 // setup the OneWire bus on D2
OneWire temprWire(DS18B20); // setup DS18B20 to work on the OneWire bus
DallasTemperature sensors(&temprWire);
float tempr; // measured value
float temprPrev; // copy of measured value for trend analysis
bool windowAlrt = 0; // specified degree of tempr drop
bool measError = 0; // measured tempr value is out of the range specified as normal
const long temprInterval = 60000; // cyclic tempr measurement interval [ms]
unsigned long temprTmrPrev = 0; // the elapsed will be the previous when temprMeas() called
float heatCorrVal; // declares the degree of overheating and cooling back, see tempMeas() function
// ---- Configuration of Serial Communication on virtual RXD/TXD
#include <SoftwareSerial.h> // SW serial RX & TX pins for HC-05
const int RX1 = 8;
const int TX1 = 4;
SoftwareSerial sUART(RX1,TX1);
char RX[2]; // store received serial data
bool errMsgSentBySys = 0;
bool startup = 1; // keep avoid a duplicate BT report at startup
const uint8_t frame1[] U8G_PROGMEM = { // XBM map
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x3F, 0x00, 0xFE, 0xFF,
0xFF, 0xFF, 0x07, 0xFF, 0xFF, 0xFF, 0x7F, 0x00, 0xFC, 0xFF, 0x7F, 0xF0,
0x3F, 0x00, 0xFE, 0xFF, 0xFF, 0xFF, 0x07, 0xFF, 0xFF, 0xFF, 0x7F, 0x00,
0xFC, 0xFF, 0x7F, 0xF0, 0x8F, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x1F, 0xFF,
0xFF, 0xFF, 0x1F, 0xFF, 0xF1, 0xFF, 0xFF, 0xFF, 0x8F, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0x1F, 0xFF, 0xFF, 0xFF, 0x1F, 0xFF, 0xF1, 0xFF, 0xFF, 0xFF,
0x8F, 0xFF, 0x1F, 0x7F, 0x8C, 0x3F, 0x1E, 0xFF, 0x00, 0xFE, 0x1F, 0xFF,
0xF1, 0x00, 0x18, 0xC0, 0x8F, 0xFF, 0x1F, 0x7F, 0x8C, 0x3F, 0x1E, 0xFF,
0x00, 0xFE, 0x1F, 0xFF, 0xF1, 0x00, 0x18, 0xC0, 0x8F, 0xFF, 0x1F, 0x1F,
0x0C, 0x3E, 0x1E, 0xFF, 0xFF, 0xF8, 0x1F, 0xFF, 0x31, 0xFE, 0x7F, 0xFC,
0x8F, 0xFF, 0x1F, 0x1F, 0x0C, 0x3E, 0x1E, 0xFF, 0xFF, 0xF8, 0x1F, 0xFF,
0x31, 0xFE, 0x7F, 0xFC, 0x0F, 0x0E, 0x18, 0x1F, 0x0C, 0x3E, 0x1E, 0xFC,
0x00, 0xF8, 0x1F, 0x7C, 0x30, 0xFE, 0x7F, 0xF0, 0x0F, 0x0E, 0x18, 0x1F,
0x0C, 0x3E, 0x1E, 0xFC, 0x00, 0xF8, 0x1F, 0x7C, 0x30, 0xFE, 0x7F, 0xF0,
0x0F, 0xFE, 0x18, 0x1F, 0x0C, 0x3E, 0x1E, 0x3C, 0x3E, 0xF8, 0x1F, 0x7C,
0xF0, 0x00, 0x7E, 0xF0, 0x0F, 0xFE, 0x18, 0x1F, 0x0C, 0x3E, 0x1E, 0x3C,
0x3E, 0xF8, 0x1F, 0x7C, 0xF0, 0x00, 0x7E, 0xF0, 0x0F, 0xFE, 0x18, 0x1F,
0x0C, 0x3E, 0x1E, 0x3C, 0x3E, 0xF8, 0x1F, 0x7C, 0xF0, 0x3F, 0x78, 0xF0,
0x0F, 0xFE, 0x18, 0x1F, 0x0C, 0x3E, 0x1E, 0x3C, 0x3E, 0xF8, 0x1F, 0x7C,
0xF0, 0x3F, 0x78, 0xF0, 0x0F, 0xFE, 0x18, 0x1F, 0x0C, 0x3E, 0x1E, 0x3C,
0x3E, 0xF8, 0x1F, 0x7C, 0xF0, 0x3F, 0x78, 0xF0, 0x0F, 0xFE, 0x18, 0x1F,
0x0C, 0x3E, 0x1E, 0x3C, 0x3E, 0xF8, 0x1F, 0x7C, 0xF0, 0x3F, 0x78, 0xF0,
0x3F, 0x00, 0x7E, 0x00, 0x3C, 0x80, 0x07, 0xF0, 0x00, 0xF8, 0x7F, 0x00,
0x3C, 0x00, 0x1E, 0xC0, 0x3F, 0x00, 0x7E, 0x00, 0x3C, 0x80, 0x07, 0xF0,
0x00, 0xF8, 0x7F, 0x00, 0x3C, 0x00, 0x1E, 0xC0, 0xFF, 0xFF, 0xFF, 0x1F,
0xFC, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0x1F, 0xFC, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x7F, 0x00, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x7F, 0x00,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x7E, 0x06, 0xE6, 0x3F, 0x06, 0xC6, 0x7F, 0xFE, 0xE7, 0x3F, 0x7E,
0xFE, 0xC7, 0x7F, 0x00, 0x00, 0x30, 0x06, 0x66, 0x60, 0x06, 0x66, 0x00,
0x60, 0x60, 0x60, 0x30, 0x06, 0x60, 0x00, 0x00, 0x00, 0x30, 0x06, 0x66,
0x60, 0x06, 0x66, 0x00, 0x60, 0x60, 0x60, 0x30, 0x06, 0x60, 0x00, 0x00,
0x00, 0x30, 0x1E, 0x66, 0x60, 0x06, 0x66, 0x00, 0x60, 0x60, 0x60, 0x30,
0x06, 0x60, 0x00, 0x00, 0x00, 0x30, 0x3E, 0x66, 0x60, 0x06, 0x66, 0x00,
0x60, 0x60, 0x60, 0x30, 0x06, 0x60, 0x00, 0x00, 0x00, 0x3C, 0x7E, 0xE6,
0x61, 0x1E, 0xC7, 0x3F, 0x70, 0xE0, 0x3F, 0x3C, 0xFE, 0xC3, 0x3F, 0x00,
0x00, 0x3C, 0x7E, 0xE6, 0x61, 0x1E, 0xC7, 0x3F, 0x70, 0xE0, 0x3F, 0x3C,
0xFE, 0xC3, 0x3F, 0x00, 0x00, 0x3C, 0xDE, 0xE7, 0x61, 0x1E, 0x07, 0x70,
0x70, 0xE0, 0x1D, 0x3C, 0x1E, 0x00, 0x70, 0x00, 0x00, 0x3C, 0x1E, 0xE7,
0x61, 0x1E, 0x07, 0x70, 0x70, 0xE0, 0x31, 0x3C, 0x1E, 0x00, 0x70, 0x00,
0x00, 0x3C, 0x1E, 0xE6, 0x61, 0x1E, 0x07, 0x70, 0x70, 0xE0, 0x61, 0x3C,
0x1E, 0x00, 0x70, 0x00, 0x00, 0x3C, 0x1E, 0xE6, 0x61, 0x1E, 0x07, 0x70,
0x70, 0xE0, 0x61, 0x3C, 0x1E, 0x00, 0x70, 0x00, 0x00, 0x7F, 0x1E, 0xE6,
0x3F, 0xFC, 0xE3, 0x3F, 0x70, 0xE0, 0x61, 0x7E, 0xFE, 0xE7, 0x3F, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00,
};
void setup() {
sUART.begin(9600);
pinMode(relayH, OUTPUT);
relayHandlerH(4); // get the working state
pinMode(ledH, OUTPUT);
pinMode(relayA, OUTPUT);
relayHandlerA(4);
pinMode(ledA, OUTPUT);
pinMode(relayL, OUTPUT);
relayHandlerL(4);
pinMode(ledL, OUTPUT);
pinMode(buzzer, OUTPUT);
sensors.begin(); // start DS18B20
temprMeas(); // do not wait for the meas.timer, call the function once at startup
tTarget = EEPROM.read(addr); // read the previously stored tTarget value from the current address of the EEPROM at startup
startup = 0;
if (!measError) {
sTX(8); // call for instant report of working states after startup
}
else {
sTX(2);
}
}
void loop() {
temprTimer();
ledHandler();
btnReadings();
sRX();
safetyTmr();
u8g.firstPage(); // scr loop
do {
draw();
} while( u8g.nextPage() );
if (frame == 0) {
delay(3000);
frame = 1;
clrScr();
}
}
void btnReadings() { // --------- Btn Readings
btnVal = analogRead(A0); // read analog val from A0
if (btnVal >= 510 && btnVal <= 516) { // btn Lighting
delay(100); // btn debounce
buzz(3, 1);
relayHandlerL(2); // call proper function with logical state flip opcode as parameter
}
else if (btnVal >= 849 && btnVal <= 855){ // btn Airing
if (windowAlrt == 1) { // if the system is in Window Alert mode, disable it
windowAlrt = 0;
buzz(4, 3);
relayHandlerA(3);
}
else { // else turn on/off the airing ventilator
delay(100);
buzz(3, 1);
relayHandlerA(2);
}
}
else if (btnVal >= 927 && btnVal <= 933){ // btn One Time Heating (15 mins) timed mode
delay(100);
buzz(3, 1);
relayHandlerH(2);
}
else if (btnVal >= 767 && btnVal <= 777) { // btn decrease tTarget
delay(100);
tTargetHandler(0);
}
else if (btnVal >= 687 && btnVal <= 697) { // btn increase tTarget
delay(100);
tTargetHandler(1);
}
else if (btnVal >= 856 && btnVal <= 862) { // inc & dec btns at the same time
tTarget = 14; // <==== initial value - press these buttons at the very first powerup!
}
}
void sRX() { // ------------- Receive Serial Data
while (sUART.available() > 0) { // if data is available to read
for (byte i = 0; i < 2; i++) {
RX[i] = sUART.read();
}
}
int iRX[2];
for (byte i = 0; i < 2; i++) {
iRX[i] = RX[i] - '0';
}
switch (RX[0]) { // ------------ accept SINGLE ALPHABETICAL control codes
case 'A':
relayHandlerH(1); // 1 = on
break;
case 'a':
relayHandlerH(0); // 0 = off
break; // Received serial data can be a single alphabetical letter from "Arduino
case 'B': // Bluetooth Control Device" Android app. If a proper alphabetical
relayHandlerA(1); // character arrives, the program code will not wait for the second one,
break; // but calls the applicable function with a proper operation code.
case 'b': // Cases of combined numeric data can be seen below.
relayHandlerA(0);
break;
case 'C':
relayHandlerL(1);
break;
case 'c':
relayHandlerL(0);
break;
case 'D':
case 'd':
tTarget = 21;
tTargetEEPROM();
buzz(3, 1);
break;
case 'E':
case 'e':
tTarget = 19;
tTargetEEPROM();
buzz(3, 1);
break;
case 'F':
case 'f':
tTarget = 14;
tTargetEEPROM();
buzz(3, 1);
break;
case 'R': // call for an overview report about controlled devices
case 'r':
sTX(8);
break;
case 'W': // disable Window Alert state
case 'w':
windowAlrt = 0;
buzz(4, 3);
relayHandlerA(3);
break;
}
// ----------------------- accept COMBINED NUMERIC control codes
// In this case a two-digit numeric control code arrives in char format,
// from an Android bluetooth serial app for instance. After a char to integer
// conversion (only if the first char is '1' or '2') a merge-process will follow,
// and the system of conditions and statements will make a decision and execute it.
// Appropriate numeric codes are:
//
// ---------------- Target Temperature:
// 10 - 24 values will be accepted as a target temperature for the thermostat function.
//
// ---------------- Device Control Codes:
// First = device code, Second = operator code
// 30, 31, 32 turns the lighting: 30=off, 31=on
// 32=flip logical state (on -> off / off -> on)
// 40, 41, 42 will do the same to the airing ventilator
// 50, 51, 52 handles the One Time Heating (15 mins) timed heater program as above
//
// ---------------- Classified Operator Codes:
// X3, X4 are classified, used only for function calls by inner program sequences
if (RX[0] == '3') {
relayHandlerL(iRX[1]);
}
if (RX[0] == '4') {
relayHandlerA(iRX[1]);
}
if (RX[0] == '5') {
relayHandlerH(iRX[1]);
}
if ((iRX[0] * 10 + iRX[1] <= 24) && (iRX[0] * 10 + iRX[1] >= 10)) { // accept only numeric values between 10 & 24
tTarget = iRX[0] * 10 + iRX[1]; // merge two integers and set tTarget
tTargetEEPROM(); // after set, call the EEPROM handler function, and
buzz(3, 1); // write the tTarget value to the appropriate byte of the EEPROM
}
if (RX[0] =='0') { // test
for (byte i = 1; i < 5; i++) {
buzz(5, 2);
}
}
for (byte i = 0; i < 2; i++) { // empty all message receiver and conversion variables
RX[i] = 'Z';
}
}
void relayHandlerL(byte lOperator) { // Lighting Handler Sequence
// operators are: 0=off, 1=on, 2=flip the state, 4=fill/refill the lighting state char var.
if ((measError) && ((lOperator == 1) || (lOperator == 2))) {
sTX(4);
return;
}
if ((lOperator == 2) || (lOperator == 0) && (lState) || (lOperator == 1) && (!lState)) {
lState = !lState;
digitalWrite(relayL, lState);
buzz(2, 1);
}
if (lOperator >= 0) { // fill up the working state char with the proper state indicator string
if (lState) {
lightingState = state_str[0];
}
else {
lightingState = state_str[1];
}
if (!startup) {
sTX(7);
}
}
}
void relayHandlerA(byte aOperator) { // Airing Handler Sequence
if ((measError) && ((aOperator == 1) || (aOperator == 2))) { // operators are: 0=off, 1=on, 2=flip the state,
sTX(4); // 3=called by temprMeas() funct., 4=fill/refill the airing state char var.
return;
}
aState = digitalRead(relayA);
if (!windowAlrt) {
if ((aOperator == 2) || (aState) && (aOperator == 0) || (!aState) && (aOperator == 1)) {
aState = !aState;
digitalWrite(relayA, aState);
aStateByCmd = digitalRead(relayA);
buzz(2, 1);
}
}
if (aOperator == 3) { // called by the temprMeas() function, 'windowAlrt' ended or started
if ((!aState) && (windowAlrt) || (aState) && (!windowAlrt) && (!aStateByCmd)) {
digitalWrite(relayA, windowAlrt);
}
}
aState = digitalRead(relayA);
if (aOperator >= 0) {
if (aState) {
if (windowAlrt) {
airingState = state_str[2];
}
else {
airingState = state_str[0];
}
}
else {
airingState = state_str[1];
}
}
if (!startup) {
sTX(6);
}
}
void relayHandlerH(byte hOperator) { // Heater Handler Sequence
// operators are: 0=off, 1=on, 2=flip the state,
// 3=called by temprMeas() funct., 4=fill/refill the heater state char var.
if ((measError) && ((hOperator == 1) || (hOperator == 2))) {
sTX(4);
return;
}
if ((!hThermostat) && (!windowAlrt) && (!measError)) { // turn on/off the One Time Heating (15 mins) timed mode
if ((hOperator == 2) || (hOperator == 1) && (!hState) || (!hOperator) && (hState)) {
buzz(2, 1);
hState = !hState;
sftyTmrEnded = 0;
timer0 = 0;
digitalWrite(relayH, hState);
}
}
if (windowAlrt) {
sTX(3);
}
if (hOperator == 3) { // this function called by the temprMeas() function (op 3)
// in order to examine windowAlrt & measError booleans
if ((windowAlrt) && (hState)) { // a window is open and the heater is running
digitalWrite(relayH, 0);
buzz(5, 3);
}
if ((!windowAlrt) && (!measError)) {
if ((hThermostat) || (!hThermostat) && (hState) && (sftyTmrEnded)) {
digitalWrite(relayH, hThermostat); // proceed the command of the Thermostat Routine
}
}
}
hState = digitalRead(relayH);
if (hOperator >= 0) {
if (hState) {
if (hThermostat) {
heaterState = state_str[2];
}
else {
heaterState = state_str[0];
}
}
else {
heaterState = state_str[1];
}
if ((((!windowAlrt) && (hOperator != 3)) || (hState)) && (!startup)) {
sTX(5);
}
}
}
void safetyTmr () { // Timer for the One Time Heating (15 mins timed) mode
if ((hState) && (!sftyTmrEnded) && (timer0 > sftyTmrInterval) && (!hThermostat)) {
sftyTmrEnded = 1;
relayHandlerH(0);
for (byte i = 1; i < 5; i++) {
buzz(i, 2);
}
}
}
void temprTimer() { // Cyclic Timer for temprMeas()
unsigned long temprTmrCurr = millis();
if (temprInterval <= temprTmrCurr - temprTmrPrev) {
temprTmrPrev = temprTmrCurr;
temprMeas();
}
}
void temprMeas() { // ----------- Temperature Measurement & Comparison Sequence
temprPrev = tempr; // save the value for next comparison
sensors.requestTemperatures(); // update sensor readings
tempr = sensors.getTempCByIndex(0); // read remperature
if ((tempr >= 40) || (tempr <= 0)) { // extreme meas values:
if (!errMsgSentBySys) { // -127, -196.60 are HW errors, +85 is tipically SW error, but
sTX(4); // can be fire, or a broken window
}
errMsgSentBySys = 1;
hThermostat = 0;
if (hState) {
relayHandlerH(0);
}
if (aState) {
relayHandlerA(0);
}
if (lState) {
relayHandlerL(0);
}
measError = 1;
for (byte i = 1; i < 10; i++) {
buzz(4, 1);
delay(50);
}
}
else {
temprPrev = tempr;
measError = 0;
errMsgSentBySys = 0;
}
if (!measError) { // ------------ Start of Temperature Analysis Sequence
if (tempr <= 17) { // Frequent, short-term switching of the heater gas boiler would cut short its lifetime, the
heatCorrVal = 0.5; // heatCorrVal value helps to keep avoid it. Declares the degree of overheating and cooling back.
} // Lower temperature demands greater heatCorrVal, because the walls are colder and adsorb better the
if ((tempr > 17) && (tempr < 19)) { // warmth from the freshly heated-up air, so the above described effect would more effective.
heatCorrVal = 0.4;
}
if (tempr >= 19) {
heatCorrVal = 0.3;
}
if (tTarget - tempr >= heatCorrVal) { // subtract measured value from target, if the difference equals or greater than heatCorrVal
sftyTmrEnded = 1; // deactivate the One Time Heating (15 mins) timed program if it is running
hThermostat = 1; // turn on the thermostat
buzz(1, 1);
}
if ((tTarget - tempr <= -1 * heatCorrVal) && (hThermostat)) {
hThermostat = 0;
}
if ((temprPrev - tempr >= 0.2) && (!windowAlrt) && (tempr <= 20)) { // in a measurement cycle and in heating season the temperature
windowAlrt = 1; // drops, it will evaluate as a window is open
sftyTmrEnded = 1;
for (byte i = 1; i < 5; i++) {
buzz(4, 1);
delay(50);
}
relayHandlerA(3); // call airing function (opcode = 3), to help refresh the air
}
if ((temprPrev - tempr <= -0.12) && (windowAlrt)) { // the tempr. falling is over, the air became warmer
windowAlrt = 0; // due to the heat capacity of the environment,
buzz(4, 3); // so switch back to normal mode
relayHandlerA(3);
}
relayHandlerH(3); // the function will examine caller param(3) & windowAlrt & measError booleans
if (!windowAlrt) {
sTX(1);
}
}
}
void tTargetHandler (bool set) { // set the needed tempr by increasing or decreasing
if (!set) { // incr
if (tTarget < 24) { // until it reaches the upper limit
tTarget++ ;
buzz(3, 1);
}
else {
buzz(2, 3);
}
}
else { // decr
if (tTarget > 10) {
tTarget-- ;
buzz(3, 1);
}
else {
buzz(2, 3);
}
}
tTargetEEPROM();
}
void tTargetEEPROM() {
EEPROM.write(addr, tTarget); // after incr/decr/set, write the tTarget value to the appropriate byte of the EEPROM
delay(10);
sTX(2);
}
void draw(void) { // logo handler
if (frame == 0) {
u8g.drawXBMP( 0, 0, 128, 64, frame1);
}
else if (frame == 1)
screenFunctState();
}
void screenFunctState(void) { // function state screen
temprWriteOut(0, 64);
u8g.drawHLine(0, 46, 128);
u8g.setFont(u8g_font_unifont);
if (!windowAlrt) {
u8g.setPrintPos( 0, 14);
u8g.print(funct_str[0]);
u8g.setPrintPos(84, 14);
u8g.print(heaterState);
}
else {
u8g.setPrintPos( 0, 14);
u8g.print(funct_str[3]);
}
u8g.setPrintPos( 0, 28);
u8g.print(funct_str[1]);
u8g.setPrintPos(88, 28);
u8g.print(airingState);
u8g.setPrintPos( 0, 42);
u8g.print(funct_str[2]);
u8g.setPrintPos(95, 42);
u8g.print(lightingState);
if ((!hState) && (!aState) && (!lState)) {
screenStndby(); // if all of controlled devices are in off, call standby screen
}
}
void screenStndby() { // standby scr
u8g.firstPage();
do {
u8g.setFontRefHeightText();
u8g.setFont(u8g_font_unifont);
if (!measError) {
u8g.setPrintPos(33, 52);
u8g.print(funct_str[5]);
u8g.setPrintPos( 8, 64);
u8g.print(funct_str[6]);
}
else {
u8g.setPrintPos( 4, 48);
u8g.print(funct_str[4]);
}
temprWriteOut(0, 16) ;
} while( u8g.nextPage() );
}
void temprWriteOut (byte tX, byte tY) { // draw tempr & tTarget variables onto different coordinates
u8g.setFont(u8g_font_courB14);
//u8g.setFont(u8g_font_6x12); // you can save ~10% of prog.memory using this font with 2x2 scale
char buftTarget[9];
sprintf (buftTarget, "%d", tTarget); // int to char
//u8g.setScale2x2();
//tY = tY / 2;
u8g.setPrintPos(tX, tY);
u8g.print(buftTarget);
u8g.setPrintPos(tX+18, tY);
u8g.print(funct_str[9]);
u8g.setPrintPos(tX+50, tY);
u8g.print(tempr);
u8g.print(char(176));
u8g.print("C");
//u8g.undoScale();
}
void clrScr(){
u8g.firstPage();
do {
} while( u8g.nextPage() );
}
void ledHandler() { // the brightness of a led is low, if the indicated device is off, and high, if its on
if (aState) {
analogWrite(ledA, bright[2]);
}
else {
analogWrite(ledA, bright[1]);
}
if (lState) {
analogWrite(ledL, bright[2]);
}
else {
analogWrite(ledL, bright[1]);
}
if (hState) {
if (!hThermostat) {
ledBlnk() ; // the heater led blinks when the One Time Heating (15 mins) timed mode is activated,
}
else {
brightHeat = bright[2] ; // and constant bright, if the thermostat routine is active
}
}
else {
brightHeat = bright[1] ;
}
analogWrite(ledH, brightHeat);
}
void ledBlnk() {
unsigned long curr = millis();
if (ledInterval <= curr - prev) { // subtract prev value from current, if the difference equals or greater than ledInterval const.
prev = curr; // overwrite the earlier value with the current and flip brightness level
if (brightHeat == bright[1]) {
brightHeat = bright[2];
}
else {
brightHeat = bright[1];
}
}
analogWrite(ledH, brightHeat);
}
void buzz(byte b, byte d) { // call with frequency and delay parameters
tone(buzzer, b * 1000);
delay(d * 100);
noTone(buzzer);
}
void sTX(byte reportTX) { // sending serial reports
switch (reportTX) {
case 0:
for (byte i = 0; i < 9; i++) {
sUART.print(funct_str[10]);
}
sUART.println(funct_str[10]);
break;
case 1:
sUART.print(funct_str[8]); // Tempr.
sUART.print(tempr);
sUART.print(char(176));
sUART.println("C");
break;
case 2:
sUART.print(funct_str[7]); // TTemp
sUART.print(tTarget);
sUART.print(char(176));
sUART.println("C");
break;
case 3:
sUART.print(funct_str[3]); // Window Alert
sUART.print(funct_str[9]);
sUART.print(tempr);
sUART.print(char(176));
sUART.println("C");
break;
case 4:
sUART.println(funct_str[4]); // Error report
break;
case 5:
sUART.print(funct_str[0]); // Working state of devices
sUART.println(heaterState);
break;
case 6:
sUART.print(funct_str[1]);
sUART.println(airingState);
break;
case 7:
sUART.print(funct_str[2]);
sUART.println(lightingState);
break;
case 8: // Overview report
sTX(0);
relayHandlerH(4);
relayHandlerA(4);
relayHandlerL(4);
sTX(2);
if (measError) {
sTX(4);
}
break;
}
}
Thermostat v11 - Fahrenheit version.ino
ArduinoWorks in Fahrenheit, I changed only the Target temperature values (50-76), and the device codes (1, 2 and 3).
// Fahrenheit version v1.1
// Program code of an intelligent Arduino smarthome thermostat solution,
// based on Arduino Nano (or higher) board, DS18B20 thermo sensor, HC-05 Bluetooth adapter, I2C 128X64 bicolor OLED display.
// The system can be controlled by buttons and Android smartphone via bluetooth.
//
// It handles the HEATER gas boiler, the bathroom AIRING ventilator and the kitchen LIGHTING - swithed with relays.
// The heater has two working ways. 1: One Time Heating (15 mins) timed mode, 2: Thermostat mode (higher priority). The adjusted target tempr.
// stored in EEPROM. The program detects hardware errors and window opening - in these cases the heater stops and/or will not start.
//
// Designed and programmed by Gyula Osi.
// All rights reserved.
// ------------------------------------------------------------------------------------------------------------------------------------
// ---- Display I2C Bus, SDA(TX) -> A4, SCL(RX) -> A5
#include "U8glib.h"
U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_NONE); // display constructor
byte frame = 0; // start logo pointer
// ---- Ports and related declarations
const byte buzzer = 9; // buzzer to D9
int btnVal; // stores analog values from buttons
const byte relayA = 11; // airing
bool aState = 0;
bool aStateByCmd; // if "window alert" is gone, the airing control goes back to the original state
const byte relayL = 13; // lighting
bool lState = 0;
const byte relayH = 10; // heater
const byte ledH = 6; // PWM ports allow output level adjustment used to change brightness
const byte ledA = 5;
const byte ledL = 3;
const byte bright[3] = {0, 10, 100};
byte brightHeat = bright[2];
#define ledInterval 1000 // heater led blinking interval
unsigned long prev = 0;
// ---- Strings for Display and Serial Reports
#define STATE_ITEMS 3 // device state indicator strings for outputs
// i -> 0 1 2
const String state_str[STATE_ITEMS] = {"on.", "off.", "auto."};
String heaterState;
String airingState;
String lightingState;
#define FUNCT_ITEMS 11
// i -> 0 1 2 3 4 5 6 7 8 9 10
String funct_str[FUNCT_ITEMS] = {"Heater is ", "Airing is ", "Lighting is ", "Window Alert!", "Hardware Error!", "Hit a Key >>", "or send a Code!", "Target tempr = ", "Temperature = ", " * ", " -"};
// ---- Temperature Measurement and Heater Related Features
#include <elapsedMillis.h>
elapsedMillis timer0; // 8-bit, PWM timer, used by function elapsedMillis()
#define sftyTmrInterval 15 * 60000 // one Time Heating (15 mins) timed mode interval [ms]
bool sftyTmrEnded; // boolean startup, the timer0 has ended
#include <EEPROM.h>
byte tTarget; // adjusted target tempr
const int addr = 0; // the current address of the tTarget variable in the EEPROM memory
bool hState = 0; // heater boolean state
bool hThermostat = 0; // thermostat boolean state
#include "OneWire.h"
#include "DallasTemperature.h"
#define DS18B20 2 // setup the OneWire bus on D2
OneWire temprWire(DS18B20); // setup DS18B20 to work on the OneWire bus
DallasTemperature sensors(&temprWire);
float tempr; // measured value
float temprPrev; // copy of measured value for trend analysis
bool windowAlrt = 0; // specified degree of tempr drop
bool measError = 0; // measured tempr value is out of the range specified as normal
const long temprInterval = 60000; // cyclic tempr measurement interval [ms]
unsigned long temprTmrPrev = 0; // the elapsed will be the previous when temprMeas() called
float heatCorrVal; // declares the degree of overheating and cooling back, see tempMeas() function
// ---- Configuration of Serial Communication on virtual RXD/TXD
#include <SoftwareSerial.h> // SW serial RX & TX pins for HC-05
const int RX1 = 8;
const int TX1 = 4;
SoftwareSerial sUART(RX1,TX1);
char RX[2]; // store received serial data
bool errMsgSentBySys = 0;
bool startup = 1; // keep avoid a duplicate BT report at startup
const uint8_t frame1[] U8G_PROGMEM = { // XBM map
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x3F, 0x00, 0xFE, 0xFF,
0xFF, 0xFF, 0x07, 0xFF, 0xFF, 0xFF, 0x7F, 0x00, 0xFC, 0xFF, 0x7F, 0xF0,
0x3F, 0x00, 0xFE, 0xFF, 0xFF, 0xFF, 0x07, 0xFF, 0xFF, 0xFF, 0x7F, 0x00,
0xFC, 0xFF, 0x7F, 0xF0, 0x8F, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x1F, 0xFF,
0xFF, 0xFF, 0x1F, 0xFF, 0xF1, 0xFF, 0xFF, 0xFF, 0x8F, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0x1F, 0xFF, 0xFF, 0xFF, 0x1F, 0xFF, 0xF1, 0xFF, 0xFF, 0xFF,
0x8F, 0xFF, 0x1F, 0x7F, 0x8C, 0x3F, 0x1E, 0xFF, 0x00, 0xFE, 0x1F, 0xFF,
0xF1, 0x00, 0x18, 0xC0, 0x8F, 0xFF, 0x1F, 0x7F, 0x8C, 0x3F, 0x1E, 0xFF,
0x00, 0xFE, 0x1F, 0xFF, 0xF1, 0x00, 0x18, 0xC0, 0x8F, 0xFF, 0x1F, 0x1F,
0x0C, 0x3E, 0x1E, 0xFF, 0xFF, 0xF8, 0x1F, 0xFF, 0x31, 0xFE, 0x7F, 0xFC,
0x8F, 0xFF, 0x1F, 0x1F, 0x0C, 0x3E, 0x1E, 0xFF, 0xFF, 0xF8, 0x1F, 0xFF,
0x31, 0xFE, 0x7F, 0xFC, 0x0F, 0x0E, 0x18, 0x1F, 0x0C, 0x3E, 0x1E, 0xFC,
0x00, 0xF8, 0x1F, 0x7C, 0x30, 0xFE, 0x7F, 0xF0, 0x0F, 0x0E, 0x18, 0x1F,
0x0C, 0x3E, 0x1E, 0xFC, 0x00, 0xF8, 0x1F, 0x7C, 0x30, 0xFE, 0x7F, 0xF0,
0x0F, 0xFE, 0x18, 0x1F, 0x0C, 0x3E, 0x1E, 0x3C, 0x3E, 0xF8, 0x1F, 0x7C,
0xF0, 0x00, 0x7E, 0xF0, 0x0F, 0xFE, 0x18, 0x1F, 0x0C, 0x3E, 0x1E, 0x3C,
0x3E, 0xF8, 0x1F, 0x7C, 0xF0, 0x00, 0x7E, 0xF0, 0x0F, 0xFE, 0x18, 0x1F,
0x0C, 0x3E, 0x1E, 0x3C, 0x3E, 0xF8, 0x1F, 0x7C, 0xF0, 0x3F, 0x78, 0xF0,
0x0F, 0xFE, 0x18, 0x1F, 0x0C, 0x3E, 0x1E, 0x3C, 0x3E, 0xF8, 0x1F, 0x7C,
0xF0, 0x3F, 0x78, 0xF0, 0x0F, 0xFE, 0x18, 0x1F, 0x0C, 0x3E, 0x1E, 0x3C,
0x3E, 0xF8, 0x1F, 0x7C, 0xF0, 0x3F, 0x78, 0xF0, 0x0F, 0xFE, 0x18, 0x1F,
0x0C, 0x3E, 0x1E, 0x3C, 0x3E, 0xF8, 0x1F, 0x7C, 0xF0, 0x3F, 0x78, 0xF0,
0x3F, 0x00, 0x7E, 0x00, 0x3C, 0x80, 0x07, 0xF0, 0x00, 0xF8, 0x7F, 0x00,
0x3C, 0x00, 0x1E, 0xC0, 0x3F, 0x00, 0x7E, 0x00, 0x3C, 0x80, 0x07, 0xF0,
0x00, 0xF8, 0x7F, 0x00, 0x3C, 0x00, 0x1E, 0xC0, 0xFF, 0xFF, 0xFF, 0x1F,
0xFC, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0x1F, 0xFC, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x7F, 0x00, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x7F, 0x00,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x7E, 0x06, 0xE6, 0x3F, 0x06, 0xC6, 0x7F, 0xFE, 0xE7, 0x3F, 0x7E,
0xFE, 0xC7, 0x7F, 0x00, 0x00, 0x30, 0x06, 0x66, 0x60, 0x06, 0x66, 0x00,
0x60, 0x60, 0x60, 0x30, 0x06, 0x60, 0x00, 0x00, 0x00, 0x30, 0x06, 0x66,
0x60, 0x06, 0x66, 0x00, 0x60, 0x60, 0x60, 0x30, 0x06, 0x60, 0x00, 0x00,
0x00, 0x30, 0x1E, 0x66, 0x60, 0x06, 0x66, 0x00, 0x60, 0x60, 0x60, 0x30,
0x06, 0x60, 0x00, 0x00, 0x00, 0x30, 0x3E, 0x66, 0x60, 0x06, 0x66, 0x00,
0x60, 0x60, 0x60, 0x30, 0x06, 0x60, 0x00, 0x00, 0x00, 0x3C, 0x7E, 0xE6,
0x61, 0x1E, 0xC7, 0x3F, 0x70, 0xE0, 0x3F, 0x3C, 0xFE, 0xC3, 0x3F, 0x00,
0x00, 0x3C, 0x7E, 0xE6, 0x61, 0x1E, 0xC7, 0x3F, 0x70, 0xE0, 0x3F, 0x3C,
0xFE, 0xC3, 0x3F, 0x00, 0x00, 0x3C, 0xDE, 0xE7, 0x61, 0x1E, 0x07, 0x70,
0x70, 0xE0, 0x1D, 0x3C, 0x1E, 0x00, 0x70, 0x00, 0x00, 0x3C, 0x1E, 0xE7,
0x61, 0x1E, 0x07, 0x70, 0x70, 0xE0, 0x31, 0x3C, 0x1E, 0x00, 0x70, 0x00,
0x00, 0x3C, 0x1E, 0xE6, 0x61, 0x1E, 0x07, 0x70, 0x70, 0xE0, 0x61, 0x3C,
0x1E, 0x00, 0x70, 0x00, 0x00, 0x3C, 0x1E, 0xE6, 0x61, 0x1E, 0x07, 0x70,
0x70, 0xE0, 0x61, 0x3C, 0x1E, 0x00, 0x70, 0x00, 0x00, 0x7F, 0x1E, 0xE6,
0x3F, 0xFC, 0xE3, 0x3F, 0x70, 0xE0, 0x61, 0x7E, 0xFE, 0xE7, 0x3F, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00,
};
void setup() {
sUART.begin(9600);
pinMode(relayH, OUTPUT);
relayHandlerH(4); // get the working state
pinMode(ledH, OUTPUT);
pinMode(relayA, OUTPUT);
relayHandlerA(4);
pinMode(ledA, OUTPUT);
pinMode(relayL, OUTPUT);
relayHandlerL(4);
pinMode(ledL, OUTPUT);
pinMode(buzzer, OUTPUT);
sensors.begin(); // start DS18B20
temprMeas(); // do not wait for the meas.timer, call the function once at startup
tTarget = EEPROM.read(addr); // read the previously stored tTarget value from the current address of the EEPROM at startup
startup = 0;
if (!measError) {
sTX(8); // call for instant report of working states after startup
}
else {
sTX(2);
}
}
void loop() {
temprTimer();
ledHandler();
btnReadings();
sRX();
safetyTmr();
u8g.firstPage(); // scr loop
do {
draw();
} while( u8g.nextPage() );
if (frame == 0) {
delay(3000);
frame = 1;
clrScr();
}
}
void btnReadings() { // --------- Btn Readings
btnVal = analogRead(A0); // read analog val from A0
if (btnVal >= 510 && btnVal <= 516) { // btn Lighting
delay(100); // btn debounce
buzz(3, 1);
relayHandlerL(2); // call proper function with logical state flip opcode as parameter
}
else if (btnVal >= 849 && btnVal <= 855){ // btn Airing
if (windowAlrt == 1) { // if the system is in Window Alert mode, disable it
windowAlrt = 0;
buzz(4, 3);
relayHandlerA(3);
}
else { // else turn on/off the airing ventilator
delay(100);
buzz(3, 1);
relayHandlerA(2);
}
}
else if (btnVal >= 927 && btnVal <= 933){ // btn One Time Heating (15 mins) timed mode
delay(100);
buzz(3, 1);
relayHandlerH(2);
}
else if (btnVal >= 767 && btnVal <= 777) { // btn decrease tTarget
delay(100);
tTargetHandler(0);
}
else if (btnVal >= 687 && btnVal <= 697) { // btn increase tTarget
delay(100);
tTargetHandler(1);
}
else if (btnVal >= 856 && btnVal <= 862) { // inc & dec btns at the same time
tTarget = 14; // <==== initial value - press these buttons at the very first powerup!
}
}
void sRX() { // ------------- Receive Serial Data
while (sUART.available() > 0) { // if data is available to read
for (byte i = 0; i < 2; i++) {
RX[i] = sUART.read();
}
}
int iRX[2];
for (byte i = 0; i < 2; i++) {
iRX[i] = RX[i] - '0';
}
switch (RX[0]) { // ------------ accept SINGLE ALPHABETICAL control codes
case 'A':
relayHandlerH(1); // 1 = on
break;
case 'a':
relayHandlerH(0); // 0 = off
break; // Received serial data can be a single alphabetical letter from "Arduino
case 'B': // Bluetooth Control Device" Android app. If a proper alphabetical
relayHandlerA(1); // character arrives, the program code will not wait for the second one,
break; // but calls the applicable function with a proper operation code.
case 'b': // Cases of combined numeric data can be seen below.
relayHandlerA(0);
break;
case 'C':
relayHandlerL(1);
break;
case 'c':
relayHandlerL(0);
break;
case 'D':
case 'd':
tTarget = 21;
tTargetEEPROM();
buzz(3, 1);
break;
case 'E':
case 'e':
tTarget = 19;
tTargetEEPROM();
buzz(3, 1);
break;
case 'F':
case 'f':
tTarget = 14;
tTargetEEPROM();
buzz(3, 1);
break;
case 'R': // call for an overview report about controlled devices
case 'r':
sTX(8);
break;
case 'W': // disable Window Alert state
case 'w':
windowAlrt = 0;
buzz(4, 3);
relayHandlerA(3);
break;
}
// ----------------------- accept COMBINED NUMERIC control codes
// In this case a two-digit numeric control code arrives in char format,
// from an Android bluetooth serial app for instance. After a char to integer
// conversion (only if the first char is '1' or '2') a merge-process will follow,
// and the system of conditions and statements will make a decision and execute it.
// Appropriate numeric codes are:
//
// ---------------- Target Temperature:
// 50 - 76 values will be accepted as a target temperature for the thermostat function.
//
// ---------------- Device Control Codes:
// First = device code, Second = operator code
// 10, 11, 12 turns the lighting: 10=off, 11=on
// 12=flip logical state (on -> off / off -> on)
// 20, 21, 22 will do the same to the airing ventilator
// 30, 31, 32 handles the One Time Heating (15 mins) timed heater program as above
//
// ---------------- Classified Operator Codes:
// X3, X4 are classified, used only for function calls by inner program sequences
if (RX[0] == '1') {
relayHandlerL(iRX[1]);
}
if (RX[0] == '2') {
relayHandlerA(iRX[1]);
}
if (RX[0] == '3') {
relayHandlerH(iRX[1]);
}
if ((iRX[0] * 10 + iRX[1] <= 76) && (iRX[0] * 10 + iRX[1] >= 50)) { // accept only numeric values between 50 & 76
tTarget = iRX[0] * 10 + iRX[1]; // merge two integers and set tTarget
tTargetEEPROM(); // after set, call the EEPROM handler function, and
buzz(3, 1); // write the tTarget value to the appropriate byte of the EEPROM
}
if (RX[0] =='0') { // test
for (byte i = 1; i < 5; i++) {
buzz(5, 2);
}
}
for (byte i = 0; i < 2; i++) { // empty all message receiver and conversion variables
RX[i] = 'Z';
}
}
void relayHandlerL(byte lOperator) { // Lighting Handler Sequence
// operators are: 0=off, 1=on, 2=flip the state, 4=fill/refill the lighting state char var.
if ((measError) && ((lOperator == 1) || (lOperator == 2))) {
sTX(4);
return;
}
if ((lOperator == 2) || (lOperator == 0) && (lState) || (lOperator == 1) && (!lState)) {
lState = !lState;
digitalWrite(relayL, lState);
buzz(2, 1);
}
if (lOperator >= 0) { // fill up the working state char with the proper state indicator string
if (lState) {
lightingState = state_str[0];
}
else {
lightingState = state_str[1];
}
if (!startup) {
sTX(7);
}
}
}
void relayHandlerA(byte aOperator) { // Airing Handler Sequence
if ((measError) && ((aOperator == 1) || (aOperator == 2))) { // operators are: 0=off, 1=on, 2=flip the state,
sTX(4); // 3=called by temprMeas() funct., 4=fill/refill the airing state char var.
return;
}
aState = digitalRead(relayA);
if (!windowAlrt) {
if ((aOperator == 2) || (aState) && (aOperator == 0) || (!aState) && (aOperator == 1)) {
aState = !aState;
digitalWrite(relayA, aState);
aStateByCmd = digitalRead(relayA);
buzz(2, 1);
}
}
if (aOperator == 3) { // called by the temprMeas() function, 'windowAlrt' ended or started
if ((!aState) && (windowAlrt) || (aState) && (!windowAlrt) && (!aStateByCmd)) {
digitalWrite(relayA, windowAlrt);
}
}
aState = digitalRead(relayA);
if (aOperator >= 0) {
if (aState) {
if (windowAlrt) {
airingState = state_str[2];
}
else {
airingState = state_str[0];
}
}
else {
airingState = state_str[1];
}
}
if (!startup) {
sTX(6);
}
}
void relayHandlerH(byte hOperator) { // Heater Handler Sequence
// operators are: 0=off, 1=on, 2=flip the state,
// 3=called by temprMeas() funct., 4=fill/refill the heater state char var.
if ((measError) && ((hOperator == 1) || (hOperator == 2))) {
sTX(4);
return;
}
if ((!hThermostat) && (!windowAlrt) && (!measError)) { // turn on/off the One Time Heating (15 mins) timed mode
if ((hOperator == 2) || (hOperator == 1) && (!hState) || (!hOperator) && (hState)) {
buzz(2, 1);
hState = !hState;
sftyTmrEnded = 0;
timer0 = 0;
digitalWrite(relayH, hState);
}
}
if (windowAlrt) {
sTX(3);
}
if (hOperator == 3) { // this function called by the temprMeas() function (op 3)
// in order to examine windowAlrt & measError booleans
if ((windowAlrt) && (hState)) { // a window is open and the heater is running
digitalWrite(relayH, 0);
buzz(5, 3);
}
if ((!windowAlrt) && (!measError)) {
if ((hThermostat) || (!hThermostat) && (hState) && (sftyTmrEnded)) {
digitalWrite(relayH, hThermostat); // proceed the command of the Thermostat Routine
}
}
}
hState = digitalRead(relayH);
if (hOperator >= 0) {
if (hState) {
if (hThermostat) {
heaterState = state_str[2];
}
else {
heaterState = state_str[0];
}
}
else {
heaterState = state_str[1];
}
if ((((!windowAlrt) && (hOperator != 3)) || (hState)) && (!startup)) {
sTX(5);
}
}
}
void safetyTmr () { // Timer for the One Time Heating (15 mins timed) mode
if ((hState) && (!sftyTmrEnded) && (timer0 > sftyTmrInterval) && (!hThermostat)) {
sftyTmrEnded = 1;
relayHandlerH(0);
for (byte i = 1; i < 5; i++) {
buzz(i, 2);
}
}
}
void temprTimer() { // Cyclic Timer for temprMeas()
unsigned long temprTmrCurr = millis();
if (temprInterval <= temprTmrCurr - temprTmrPrev) {
temprTmrPrev = temprTmrCurr;
temprMeas();
}
}
void temprMeas() { // ----------- Temperature Measurement & Comparison Sequence
temprPrev = tempr; // save the value for next comparison
sensors.requestTemperatures(); // update sensor readings
tempr = sensors.getTempFByIndex(0); // read remperature
if ((tempr >= 104) || (tempr <= 32)) { // extreme meas values:
if (!errMsgSentBySys) { // -127, -196.60 are HW errors, +85 is tipically SW error, but
sTX(4); // can be fire, or a broken window
}
errMsgSentBySys = 1;
hThermostat = 0;
if (hState) {
relayHandlerH(0);
}
if (aState) {
relayHandlerA(0);
}
if (lState) {
relayHandlerL(0);
}
measError = 1;
for (byte i = 1; i < 10; i++) {
buzz(4, 1);
delay(50);
}
}
else {
temprPrev = tempr;
measError = 0;
errMsgSentBySys = 0;
}
if (!measError) { // ------------ Start of Temperature Analysis Sequence
if (tempr <= 62.6) { // Frequent, short-term switching of the heater gas boiler would cut short its lifetime, the
heatCorrVal = 0.9; // heatCorrVal value helps to keep avoid it. Declares the degree of overheating and cooling back.
} // Lower temperature demands greater heatCorrVal, because the walls are colder and adsorb better the
if ((tempr > 62.6) && (tempr < 66.2)) { // warmth from the freshly heated-up air, so the above described effect would more effective.
heatCorrVal = 0.72;
}
if (tempr >= 66.2) {
heatCorrVal = 0.54;
}
if (tTarget - tempr >= heatCorrVal) { // subtract measured value from target, if the difference equals or greater than heatCorrVal
sftyTmrEnded = 1; // deactivate the One Time Heating (15 mins) timed program if it is running
hThermostat = 1; // turn on the thermostat
buzz(1, 1);
}
if ((tTarget - tempr <= -1 * heatCorrVal) && (hThermostat)) {
hThermostat = 0;
}
if ((temprPrev - tempr >= 0.36) && (!windowAlrt) && (tempr <= 68)) { // in a measurement cycle and in heating season the temperature
windowAlrt = 1; // drops, it will evaluate as a window is open
sftyTmrEnded = 1;
for (byte i = 1; i < 5; i++) {
buzz(4, 1);
delay(50);
}
relayHandlerA(3); // call airing function (opcode = 3), to help refresh the air
}
if ((temprPrev - tempr <= -0.216) && (windowAlrt)) { // the tempr. falling is over, the air became warmer
windowAlrt = 0; // due to the heat capacity of the environment,
buzz(4, 3); // so switch back to normal mode
relayHandlerA(3);
}
relayHandlerH(3); // the function will examine caller param(3) & windowAlrt & measError booleans
if (!windowAlrt) {
sTX(1);
}
}
}
void tTargetHandler (bool set) { // set the needed tempr by increasing or decreasing
if (!set) { // incr
if (tTarget < 76) { // until it reaches the upper limit
tTarget++ ;
buzz(3, 1);
}
else {
buzz(2, 3);
}
}
else { // decr
if (tTarget > 50) {
tTarget-- ;
buzz(3, 1);
}
else {
buzz(2, 3);
}
}
tTargetEEPROM();
}
void tTargetEEPROM() {
EEPROM.write(addr, tTarget); // after incr/decr/set, write the tTarget value to the appropriate byte of the EEPROM
delay(10);
sTX(2);
}
void draw(void) { // logo handler
if (frame == 0) {
u8g.drawXBMP( 0, 0, 128, 64, frame1);
}
else if (frame == 1)
screenFunctState();
}
void screenFunctState(void) { // function state screen
temprWriteOut(0, 64);
u8g.drawHLine(0, 46, 128);
u8g.setFont(u8g_font_unifont);
if (!windowAlrt) {
u8g.setPrintPos( 0, 14);
u8g.print(funct_str[0]);
u8g.setPrintPos(84, 14);
u8g.print(heaterState);
}
else {
u8g.setPrintPos( 0, 14);
u8g.print(funct_str[3]);
}
u8g.setPrintPos( 0, 28);
u8g.print(funct_str[1]);
u8g.setPrintPos(88, 28);
u8g.print(airingState);
u8g.setPrintPos( 0, 42);
u8g.print(funct_str[2]);
u8g.setPrintPos(95, 42);
u8g.print(lightingState);
if ((!hState) && (!aState) && (!lState)) {
screenStndby(); // if all of controlled devices are in off, call standby screen
}
}
void screenStndby() { // standby scr
u8g.firstPage();
do {
u8g.setFontRefHeightText();
u8g.setFont(u8g_font_unifont);
if (!measError) {
u8g.setPrintPos(33, 52);
u8g.print(funct_str[5]);
u8g.setPrintPos( 8, 64);
u8g.print(funct_str[6]);
}
else {
u8g.setPrintPos( 4, 48);
u8g.print(funct_str[4]);
}
temprWriteOut(0, 16) ;
} while( u8g.nextPage() );
}
void temprWriteOut (byte tX, byte tY) { // draw tempr & tTarget variables onto different coordinates
u8g.setFont(u8g_font_courB14);
//u8g.setFont(u8g_font_6x12); // you can save ~10% of prog.memory using this font with 2x2 scale
char buftTarget[9];
sprintf (buftTarget, "%d", tTarget); // int to char
//u8g.setScale2x2();
//tY = tY / 2;
u8g.setPrintPos(tX, tY);
u8g.print(buftTarget);
u8g.setPrintPos(tX+18, tY);
u8g.print(funct_str[9]);
u8g.setPrintPos(tX+50, tY);
u8g.print(tempr);
//u8g.print(char(176));
u8g.print("F");
//u8g.undoScale();
}
void clrScr(){
u8g.firstPage();
do {
} while( u8g.nextPage() );
}
void ledHandler() { // the brightness of a led is low, if the indicated device is off, and high, if its on
if (aState) {
analogWrite(ledA, bright[2]);
}
else {
analogWrite(ledA, bright[1]);
}
if (lState) {
analogWrite(ledL, bright[2]);
}
else {
analogWrite(ledL, bright[1]);
}
if (hState) {
if (!hThermostat) {
ledBlnk() ; // the heater led blinks when the One Time Heating (15 mins) timed mode is activated,
}
else {
brightHeat = bright[2] ; // and constant bright, if the thermostat routine is active
}
}
else {
brightHeat = bright[1] ;
}
analogWrite(ledH, brightHeat);
}
void ledBlnk() {
unsigned long curr = millis();
if (ledInterval <= curr - prev) { // subtract prev value from current, if the difference equals or greater than ledInterval const.
prev = curr; // overwrite the earlier value with the current and flip brightness level
if (brightHeat == bright[1]) {
brightHeat = bright[2];
}
else {
brightHeat = bright[1];
}
}
analogWrite(ledH, brightHeat);
}
void buzz(byte b, byte d) { // call with frequency and delay parameters
tone(buzzer, b * 1000);
delay(d * 100);
noTone(buzzer);
}
void sTX(byte reportTX) { // sending serial reports
switch (reportTX) {
case 0:
for (byte i = 0; i < 9; i++) {
sUART.print(funct_str[10]);
}
sUART.println(funct_str[10]);
break;
case 1:
sUART.print(funct_str[8]); // Tempr.
sUART.print(tempr);
//sUART.print(char(176));
sUART.println("F");
break;
case 2:
sUART.print(funct_str[7]); // TTemp
sUART.print(tTarget);
//sUART.print(char(176));
sUART.println("F");
break;
case 3:
sUART.print(funct_str[3]); // Window Alert
sUART.print(funct_str[9]);
sUART.print(tempr);
//sUART.print(char(176));
sUART.println("F");
break;
case 4:
sUART.println(funct_str[4]); // Error report
break;
case 5:
sUART.print(funct_str[0]); // Working state of devices
sUART.println(heaterState);
break;
case 6:
sUART.print(funct_str[1]);
sUART.println(airingState);
break;
case 7:
sUART.print(funct_str[2]);
sUART.println(lightingState);
break;
case 8: // Overview report
sTX(0);
relayHandlerH(4);
relayHandlerA(4);
relayHandlerL(4);
sTX(2);
if (measError) {
sTX(4);
}
break;
}
}







{kind=link}
{kind=link}
Comments