



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 2 | |||
Software apps and online services | ||||||
| ||||||
My motivation was my kids. I want to share time and have fun with them teaching them some basic concepts about projects and electronics.
As PM I assigned some tasks for one of them in this project: to build a Lego car to be used for installing the Arduino board, the wheels and motors coupled and space to install 9V batteries. This mission was given in a piece of paper and a specific date was established. My intention is to use this experience in the near future for a GO-KART prototype.
Conceptual ideaTo copy the old idea of building a TOY CAR controlled by Bluetooth from a smartphone.
Main ConcernMy main concern about this project is that doesn't exist batteries that really can be cheap and long time feeder for this kind of toys. So the scientific community has a challenge to solve the problem: How to obtain electric power supply cheap and easy for portable devices and toys and other future devices with motors?
Project developmentIn this case I went on agile techniques to develop projects: few documents, quick schemes and drafts, not complicated engineering, just selecting parts, buying parts, connecting parts, interconnecting parts, plugging and playing with the toy. In projects this orientation is called FFP - Fit For Purpose.
The steps were:
1. Selecting and buying the parts:
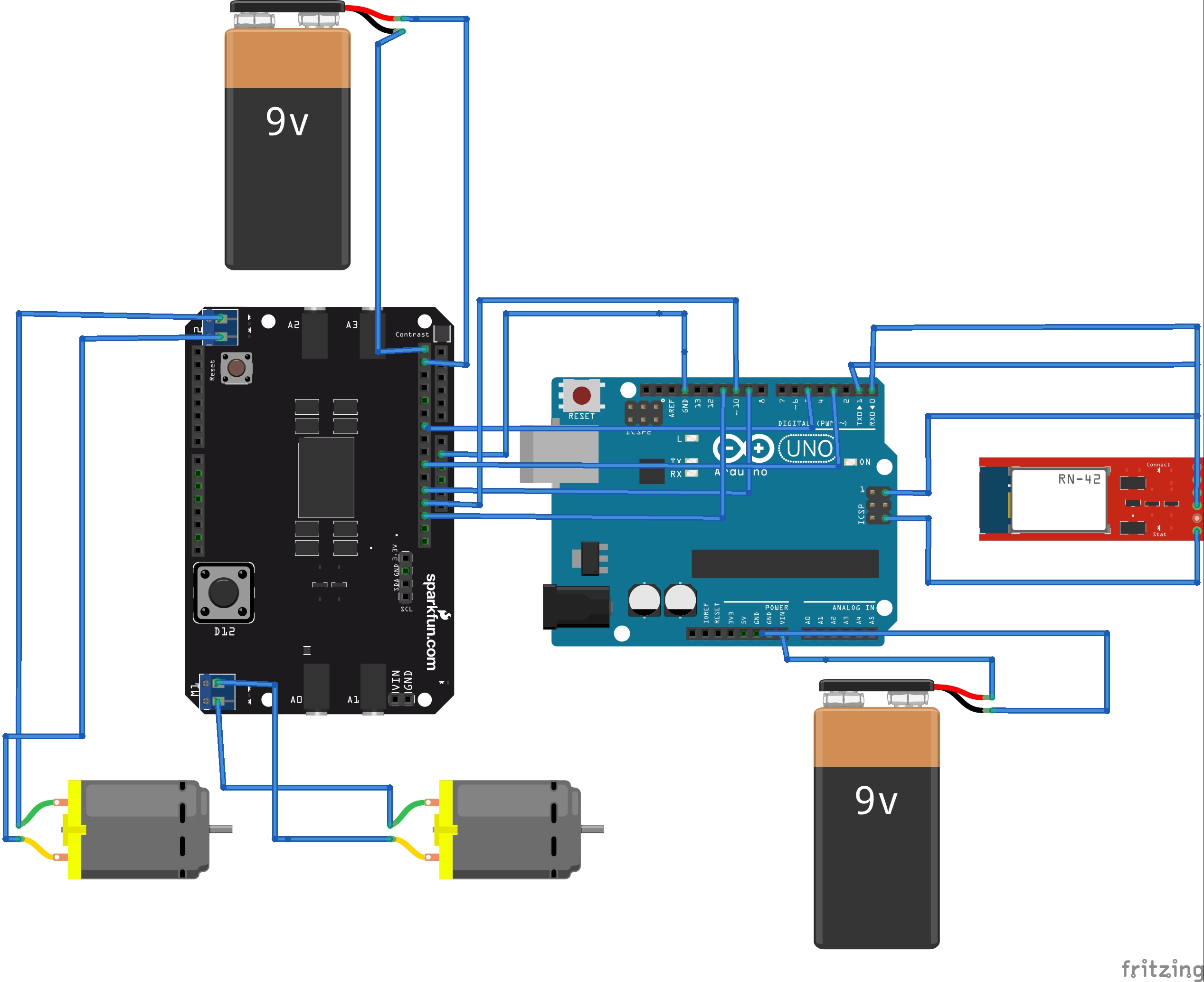
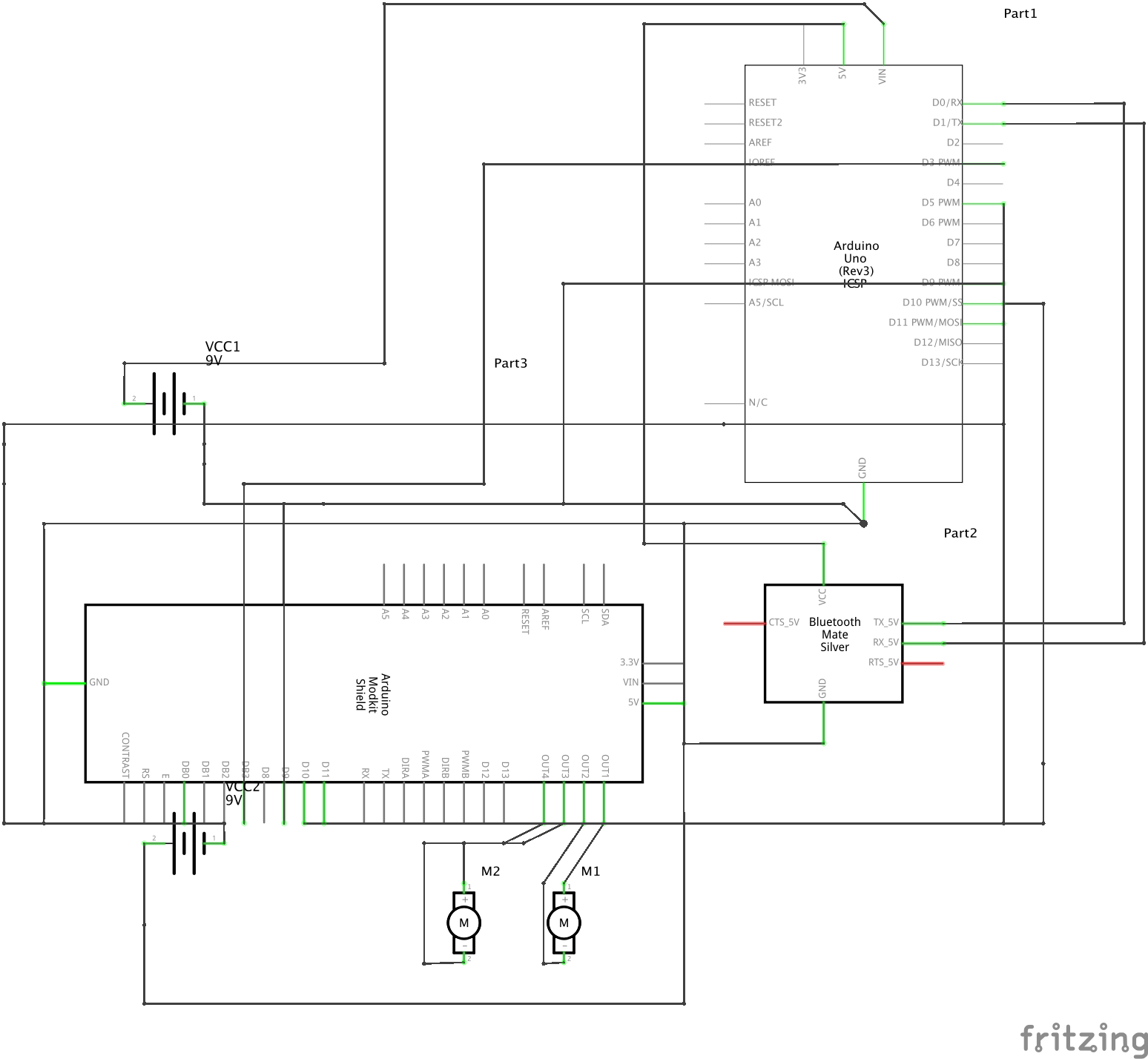
2. Interconnecting parts
3. Bill of materials issuing
4. Assembling parts in the LEGO toy car
5. Code development. See software details.
6. App Development- CarriTomas
7. Testing the LEGO Toy Car in the prototype garage
With the APP available we tested all the commands and speed selection available for the LEGO Toy Car.
We even spent a lot of time tuning right-turn and left-turn instructions and concluded that it would better to use Direction with servo instead a Free Wheel. The behavior of the toy is random. Looking at this in a positive way, the random behavior of the Lego car is a source of fun for the kids. Using servo will have more power consumption but a smooth control.
In this video we can see the test in the "garage" of the LEGO Toy Car:
8. Normal operation
Final Notes and Lessons Learned- Kids really enjoy this project, and it is impossible to prevent them from touching the parts, so be sure you have the best safety practices. Remember, always check your practices, design isolation, before start the toy with kids. App should be always operated by an adult.
- We are far away from having commercial and cheap batteries that can be used with this kind of toys - this is a market opportunity.
- My GO-Kart Project should be developed based on combustion motors, it is mandatory if I want to enjoy the investment having a low price of operation power source, to move it.
- SCRUM projects techniques used on this prototype were very important in this kind of developments.
- Bluetooth controls could be disconnected if your car is moving quickly and far from you or for random conditions, so it would be nice to install a local on/off switch, and be all the time as near as possible.
- When the battery voltage level (used to feed the motor) goes down it is possible to loose control of one motor control for forward and backward commands.
- The L298N bridge has very good performance and power output, so the creativity for using this part is triggered doing this prototype.
- Android studio platform is quickly adjustable for this APP requirement.







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.