


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Incremental encoders are often used for industrial applications like robotics or positioning tracking. Encoders for industrial applications comes mostly with a differential RS-422 interface.
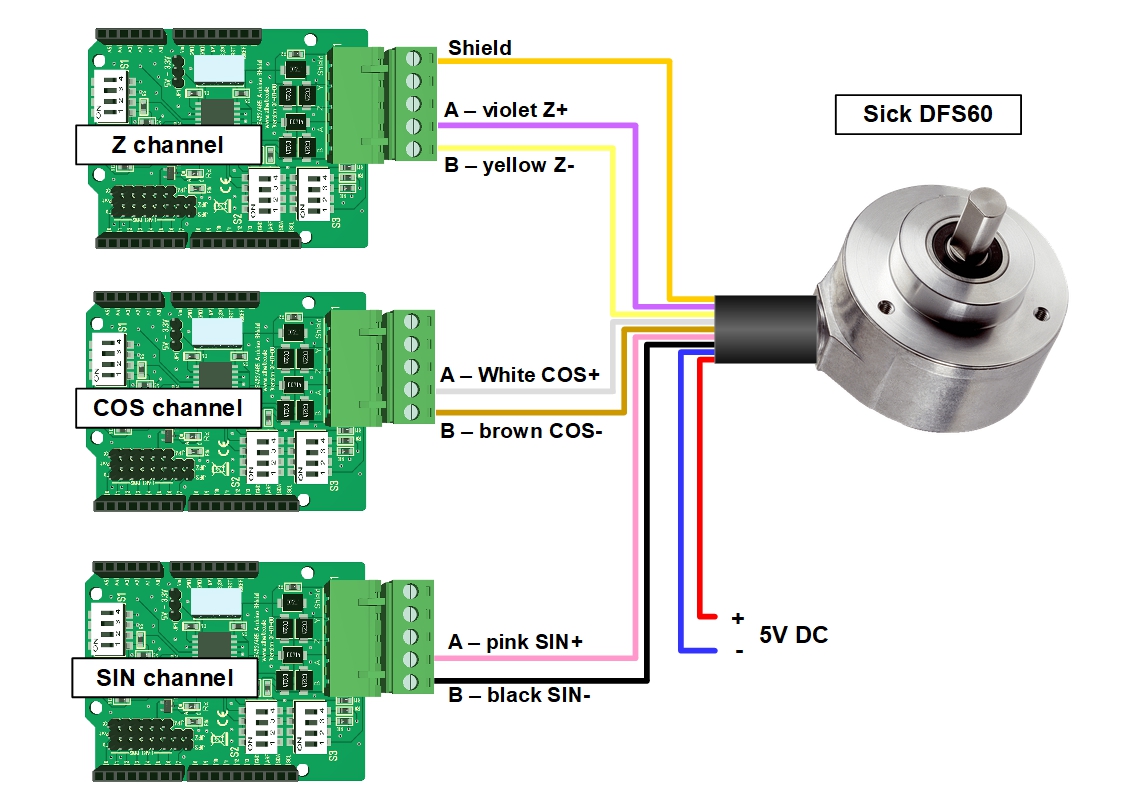
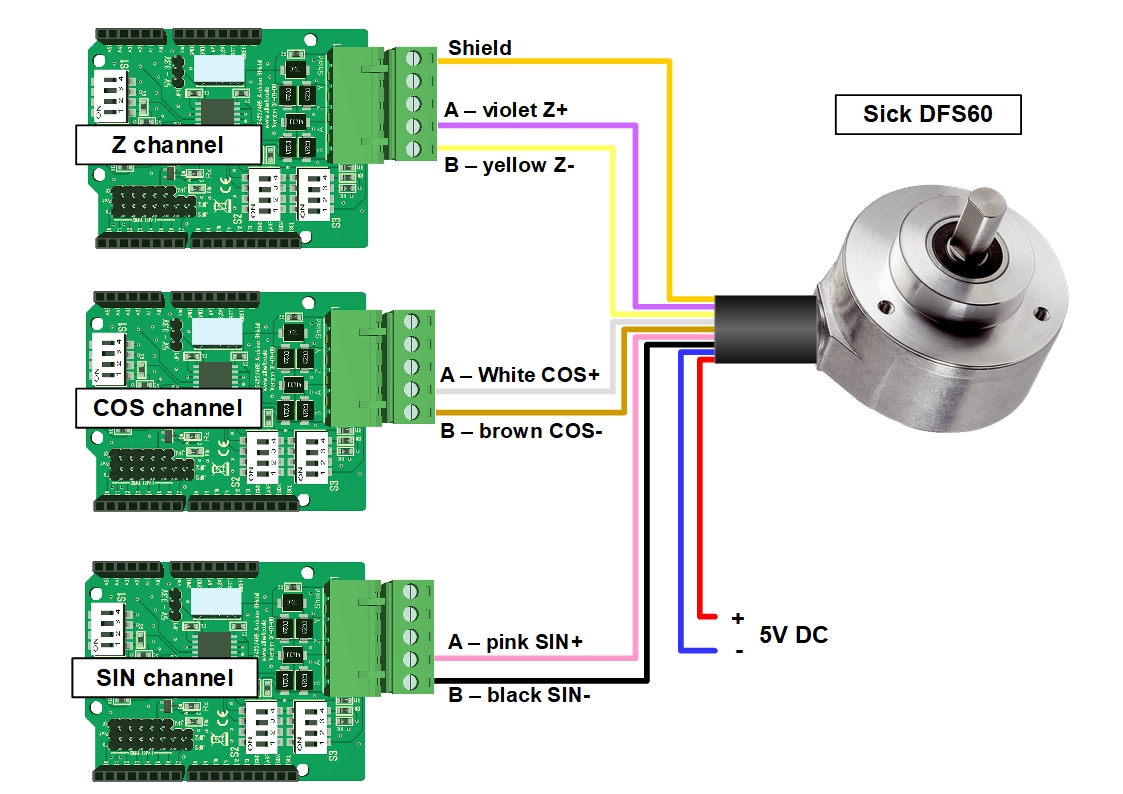
The RS-422 is only used as a hardware layer. No serial protocol will be transmitted over the RS-422. Only the pulses of the encoder itself are directly transferred via 3 different RS-422 channels: SIN, COS and Z (zero position).
I will show in this small project how to use an industrial incremental encoder - in our case SICK DFS60 - with an Arduino UNO. Because of the 3 independent RS-422 channels we need 3 RS-422 inputs for the Arduino. For this purpose I've used 3 pcs of my Arduino RS422/RS485 shields - stacked on one Arduino.
the dip switch setting for any shield is the same.
- S1: ON, OFF, OFF, OFF
- S2: OFF, OFF, ON, ON
- S3: ON, OFF, OFF, OFF
The Jumper setting for any shield is different. Depending from the connected channel the RX pin is configured to:
- Z: D2
- COS: D3
- SIN: D4
The voltage jumper JP1 must be setted to 5V.
Wiring:The encoder can be powered by an laboratory power supply or directely by the 5V of the Arduino UNO
Final test:Open the serial monitor with 115200 baud. You will see the current increment value (updated all 0,5s) and the current status of the encoder there....




{kind=link}
Comments
Please log in or sign up to comment.