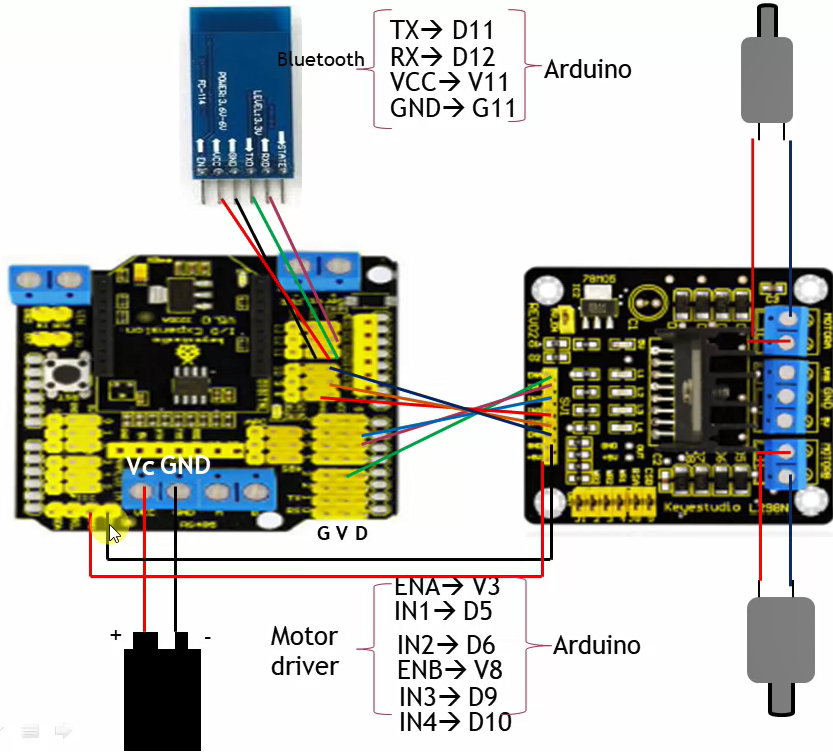
#include <SoftwareSerial.h>
SoftwareSerial BlueTooth(11, 12); // (TXD, RXD) of HC-06
char BT_input; // to store input character received via BT.
int speedpin=3;
int MotorRight1 = 5;
int MotorRight2 = 6;
int speedpin1=8;
int MotorLeft1 = 9;
int MotorLeft2 = 10;
void setup()
{
BlueTooth.begin(9600);
Serial.begin(9600);
pinMode(speedpin,OUTPUT);
pinMode(MotorRight1, OUTPUT);
pinMode(MotorRight2, OUTPUT);
pinMode(MotorLeft1, OUTPUT);
pinMode(MotorLeft2, OUTPUT);
pinMode(speedpin1,OUTPUT);
}
void loop()
{
if (BlueTooth.available())
{
BT_input=BlueTooth.read();
if (BT_input=='U')
{
analogWrite(speedpin,100);
analogWrite(speedpin1,100);
digitalWrite(MotorRight1,HIGH);
digitalWrite(MotorRight2,LOW);
digitalWrite(MotorLeft1,LOW);
digitalWrite(MotorLeft2,LOW);
}
else if (BT_input=='L')
{
analogWrite(speedpin,100);
analogWrite(speedpin1,100);
digitalWrite(MotorRight1,HIGH);
digitalWrite(MotorRight2,LOW);
digitalWrite(MotorLeft1,LOW);
digitalWrite(MotorLeft2,HIGH);
}
else if (BT_input=='R')
{
analogWrite(speedpin,100);
analogWrite(speedpin1,100);
digitalWrite(MotorRight1,HIGH);
digitalWrite(MotorRight2,LOW);
digitalWrite(MotorLeft1,HIGH);
digitalWrite(MotorLeft2,LOW);
}
else if (BT_input=='D')
{
analogWrite(speedpin,100);
analogWrite(speedpin1,100);
digitalWrite(MotorRight1,LOW);
digitalWrite(MotorRight2,HIGH);
digitalWrite(MotorLeft1,LOW);
digitalWrite(MotorLeft2,LOW);
}
else if (BT_input=='X')
{
analogWrite(speedpin,100);
analogWrite(speedpin1,100);
digitalWrite(MotorRight1,LOW);
digitalWrite(MotorRight2,LOW);
digitalWrite(MotorLeft1,LOW);
digitalWrite(MotorLeft2,LOW);
}
}
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.