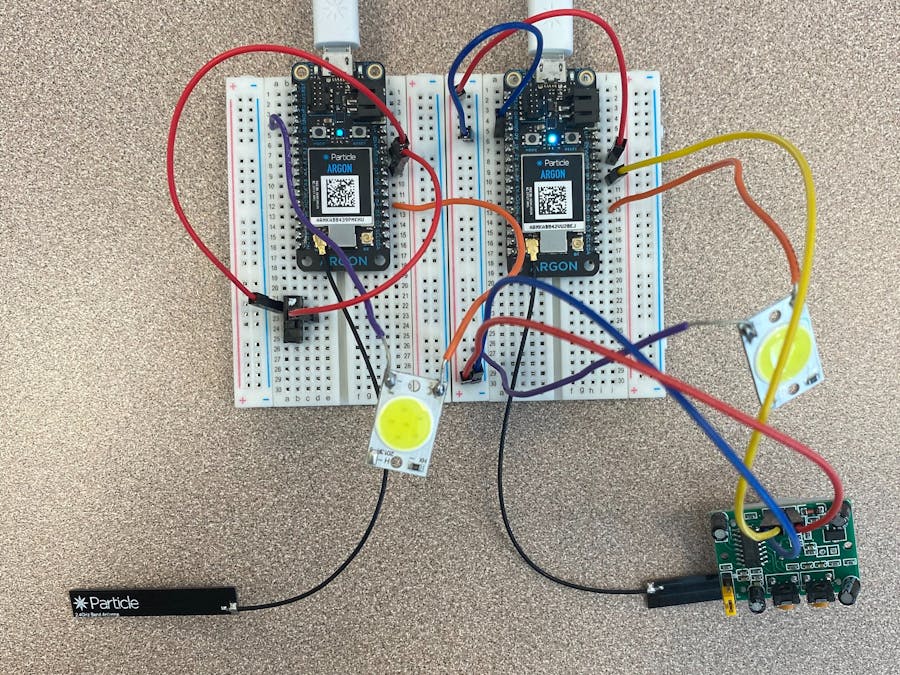
The idea for this project came about when Ruben and I met up to write our code. Our original design was a light that would be activated as a motion sensor for applications in commercial and residential environments. Since our project requires bidirectional communication between our two Argon devices, we decided this would be too simple. As we did more research on the applications of motion sensors and lights with two-way communication, we came up with the idea for a project that would let you wave your hand over a motion sensor to activate a light on another device, and then use a switch to activate the light on the opposite argon, allowing for communication to let others know that you are okay or to send a message. This could be applied to bracelets or something similar, where you can communicate by waving your hand and making the other person's bracelet light up.
Below is a simple demonstration of how our project works, and explained after the video will be our process and troubleshooting on how we coded and wired everything.
Youtibe Demonstration of how our IOT project Fucntions
When we started working on the code for the project we ran into a lot of small issues when trying to flash the code to our devices, but once we claimed both devices on the same account the code flashed to each argon without a problem. Once we had the circuit wired all that was left was to check our code and test it multiple times to see if our project would correctly record data and keep both lights on for the correct amount of time. Our Goal for this project was to create something that could be useful, but also not complicated so that anyone viewing this page could replicate it and use it for themselves. After spending time working on the project, I feel that our goal was accomplished and that we created something that was accessible and useable for anyone with access to a particle Argon device.
Both of the above graphs can be accessed from the links included above, and they both show if the switch and motion sensor were used, by outputting a value of 1 or 0. A value of 1 means that the motion sensor detected motion or that the switch was in an open position. These graphs show each time a sensor is activated and can help us keep track of our events.
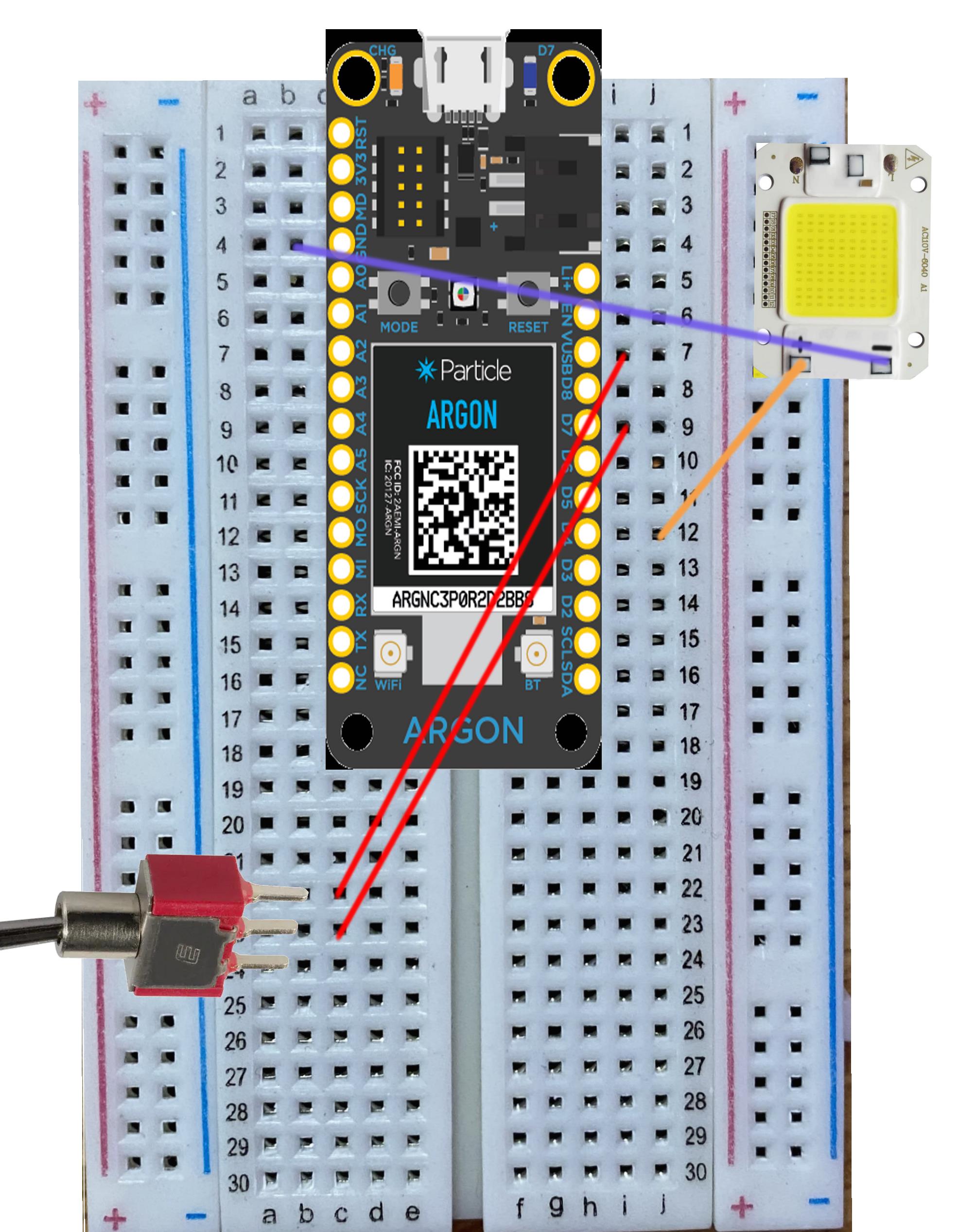
Very simple, power is given from the vusb pin meaning about 4.5-5V is given. This is wired to a switch which then goes to D7 pin and the LED module is wired from D4 pin to ground. Power goes to D7 to ensure the user they are activating the switch. The vusb pin is used in hopes of making the LED module brighter
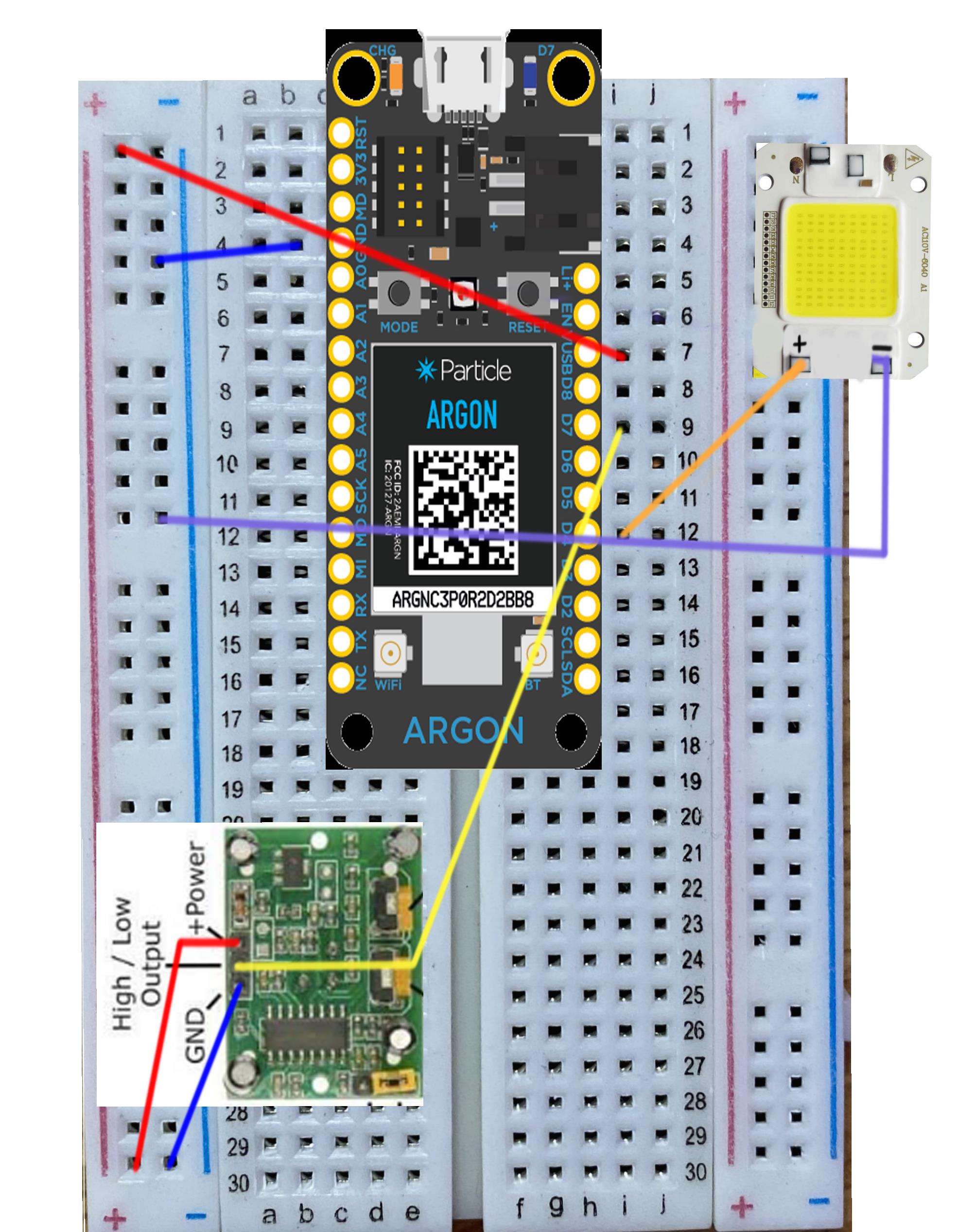
Motion Sensor Schematic
Power is given from the vusb pin meaning about 4.5-5V is given. This is wired to the positive rail on the side of the breadboard. Ground is then also wired to the negative terminal of this rail. The PIR motion sensor is powered from here and its output is wired to D7 to see if it is working. The LED module's positive terminal is on pin D4 and its negative is on the ground terminal.
intinputPin=D7;// choose the input pin (for PIR sensor)intledPin=D4;// LED PinintpirState=LOW;// we start, assuming the switch is breaking the circuitintval=0;// variable for reading the pin statusintcalibrateTime=10000;voidsetup(){pinMode(ledPin,OUTPUT);pinMode(inputPin,INPUT);// declare switch as inputParticle.subscribe("iot/motion",LEDUP,MY_DEVICES);//allows for communication with other argon}voidloop(){// in order to keep efficiency up code was copied from motion sensorif(calibrated()){// get the data whether the switch is flipped on or offreadTheSensor();// report it out, if the state of the switch has changedreportTheData();}}voidreadTheSensor(){val=digitalRead(inputPin);}boolcalibrated(){returnmillis()-calibrateTime>0;}voidreportTheData(){// if the switch is flipped// or if its notif(val==HIGH){// the current state there is no power going through so switch is breaking the circuit// i.e. it's just changed// announce this switch by publishing an eentif(pirState==LOW){// we have just turned onParticle.publish("iot/flipon","1",PRIVATE);//This is the line of code that will send information to the cloud in order for the other argon to recieve it.//Its given the value of 1 inorder to tell the receiving argon to turn its LED on// Update the current statepirState=HIGH;}}else{if(pirState==HIGH){// we have just turned ofParticle.publish("iot/flipon","0",PRIVATE);//Sends receiving argon the given the value of 0 inorder to tell the receiving argon to turn its LED off// Update the current statepirState=LOW;}}}voidLEDUP(constchar*event,constchar*data)//Allows this argon to recieve information from the argon with the switch in order to power its own LED on or off{digitalWrite(ledPin,HIGH);delay(2500);digitalWrite(ledPin,LOW);}
Motion Sensor Code
C/C++
This is the code given to the argon wired with the motion sensor
intinputPin=D7;// choose the input pin (for PIR sensor)intledPin=D4;// LED PinintpirState=LOW;// we start, assuming no motion detectedintval=0;// variable for reading the pin statusintcalibrateTime=10000;// wait for it to calibratevoidsetup(){pinMode(ledPin,OUTPUT);pinMode(inputPin,INPUT);// declare sensor as inputParticle.subscribe("iot/flip",LEDON,MY_DEVICES);//This is how this argon comunicates with the other by subscribing to the others event}voidloop(){// if the sensor is calibratedif(calibrated()){// get the data from the sensorreadTheSensor();// report it out, if the state has changedreportTheData();}}voidreadTheSensor(){val=digitalRead(inputPin);}boolcalibrated(){returnmillis()-calibrateTime>0;}voidreportTheData(){// if the sensor reads high// or there is now motionif(val==HIGH){// there is no motion// i.e. it's just changed// announce this change by publishing an eentif(pirState==LOW){// we have just turned onParticle.publish("iot/motion","1",PRIVATE);//This is the line of code that will send information to the cloud in order for the other argon to recieve it.//Its given the value of 1 inorder to tell the receiving argon to turn its LED on// Update the current statepirState=HIGH;}}else{if(pirState==HIGH){// we have just turned ofParticle.publish("iot/motion","0",PRIVATE);//Sends receiving argon the given the value of 0 inorder to tell the receiving argon to turn its LED off// Update the current statepirState=LOW;}}}voidLEDON(constchar*event,constchar*data)//Allows this argon to recieve information from the argon with the switch in order to power its own LED on or off{digitalWrite(ledPin,HIGH);delay(2500);digitalWrite(ledPin,LOW);}



_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)













{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.