Our device will indicate when your dog/pet wants to come back inside from playing, defecating, or laying around. Our device will help any individuals that have a busy schedule and can't watch over their dog being outside. The device works by using a motion sensor to detach any movement near the door. If there is movement an ultrasonic will turn on and double-check if there is actually a dog at the door. When both sensors indicate that there is a dog at the door, the sensors will then send that information to the third device which is a passive buzzer. The buzzer will sound indicating that you must let your dog in. Understanding how the Particle Argon and sensors operate we’re able to make this device come to life.
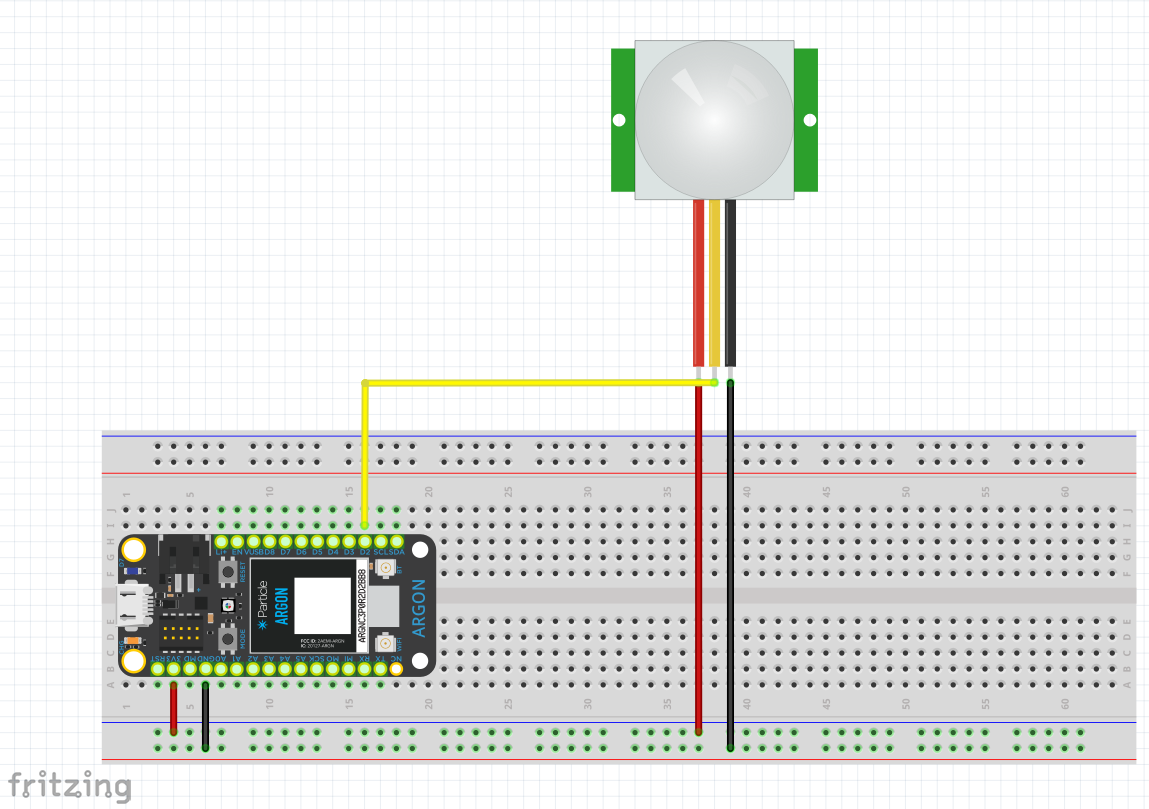
Figure 1 - Motion Sensor
Figure 1 shows the motion sensor configuration with our first Particle Argon.
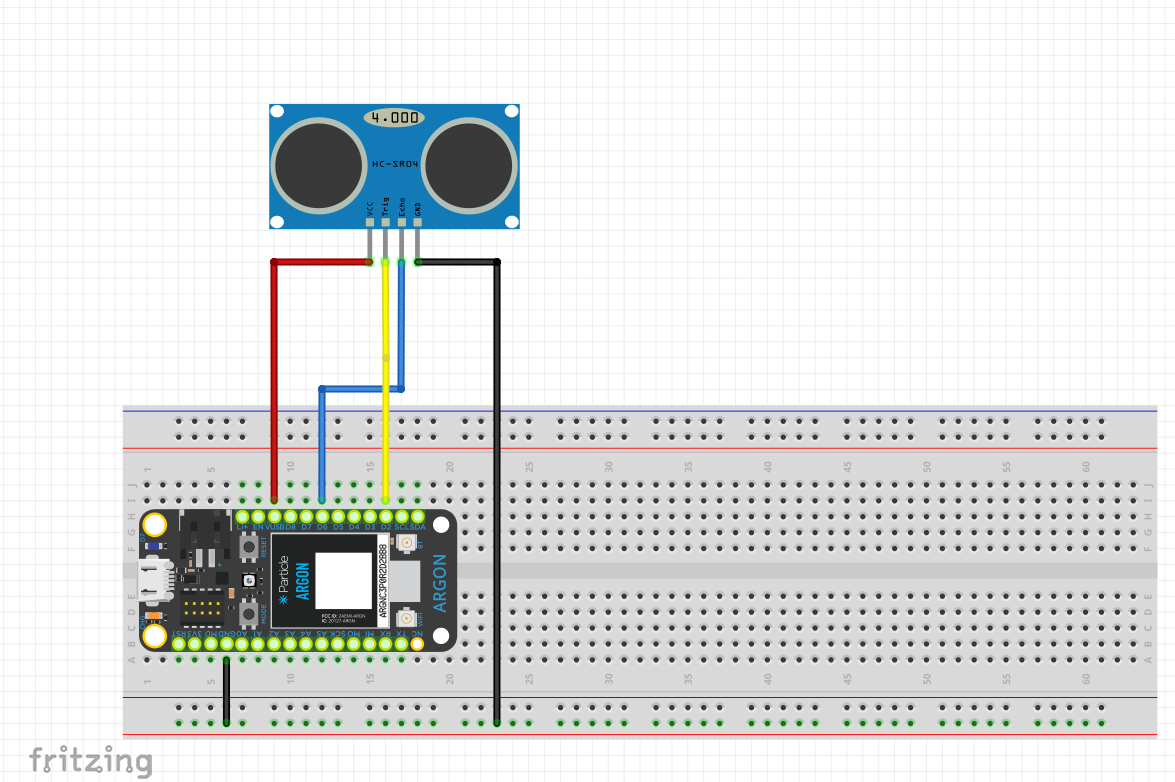
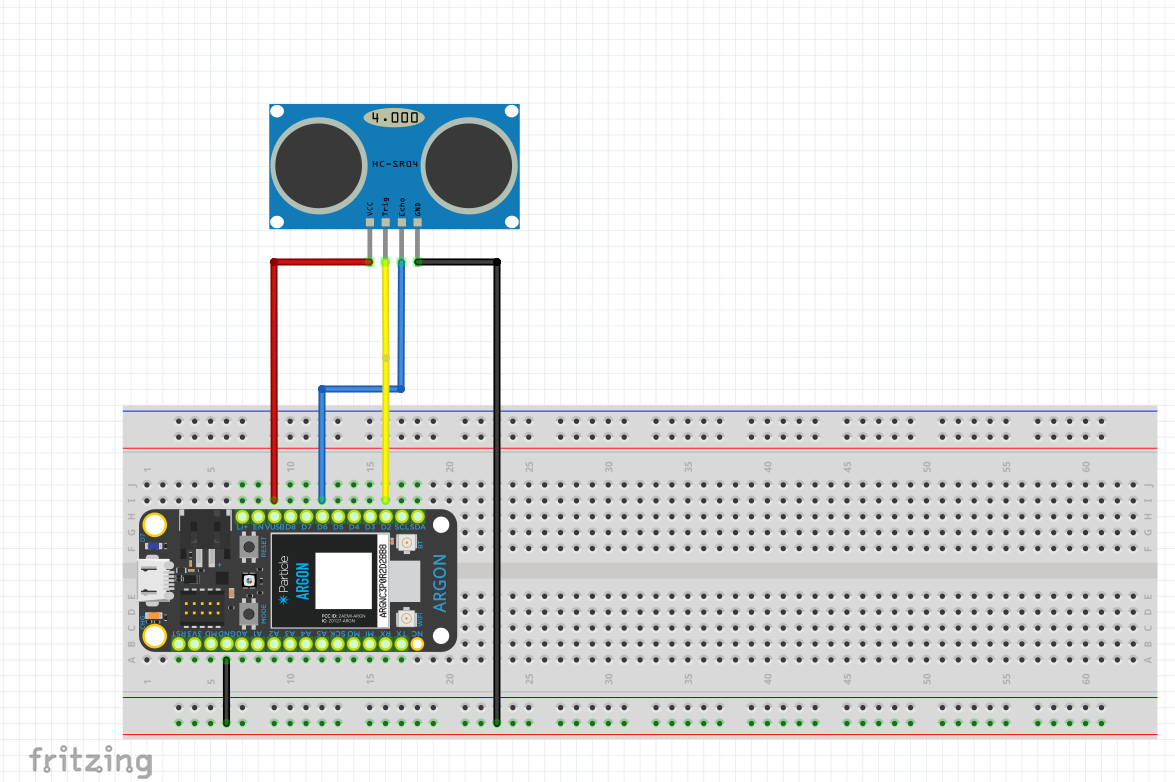
Figure 2 - Ultrasonic Sensor
Figure 2 shows the ultrasonic sensor configuration with our second Particle Argon.
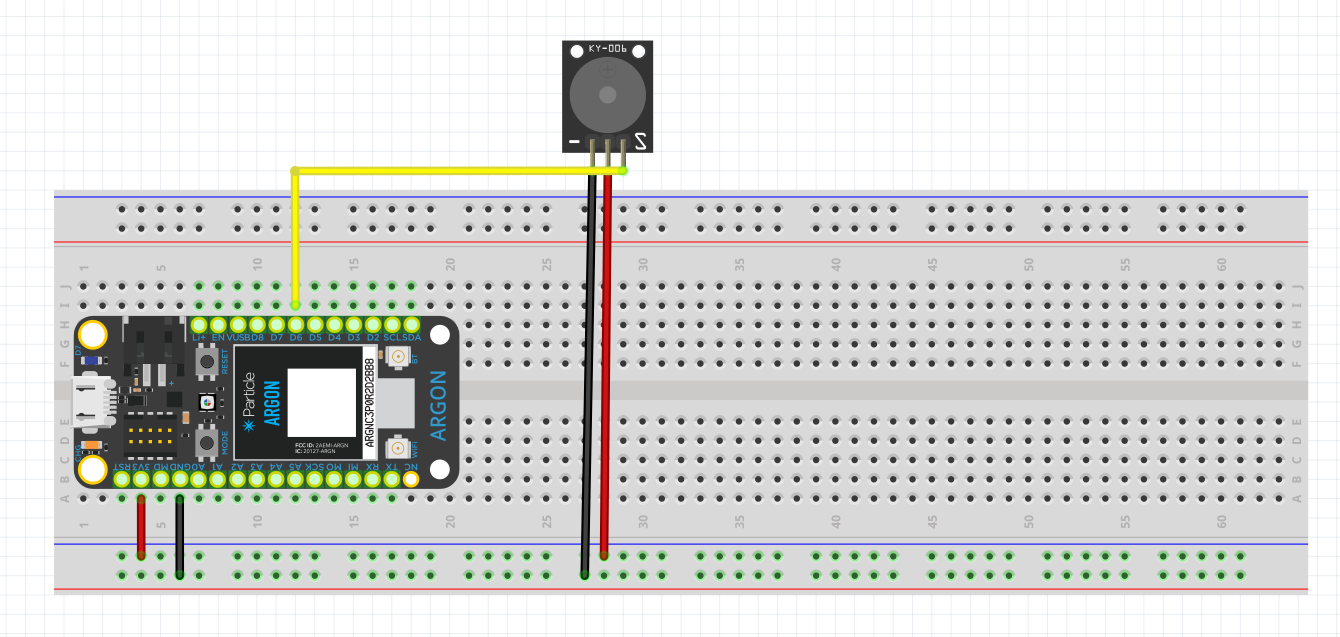
Figure 3 - Passive Buzzer
Figure 3 shows the passive buzzer configuration with our last Particle Argon.
Figure 4 - Complete Device
Figure 4 shows all the sensors together. The active buzzer can be relocated and placed anywhere as long as the Particle Argon is connected to WiFi. The motion sensor and ultrasonic sensors must be together at the door.
Video 1 - Live Demonstration
The video above shows a live demonstration of our device functioning in real-time.
VCC from the ultrasonic sensor is connected to the VUSB port on the Particle Argon, ground from the ultrasonic sensor is connected to the ground on the Particle Argon, Trig from the ultrasonic sensor is connected to D2 on the Particle Argon and Echo from the ultrasonic sensor is connected to D6 on the Particle Argon.
Circuit Diagram (Motion Sensor)
VCC from the motion sensor is connected to the 3.3V port on the Particle Argon, ground from the motion sensor is connected to the ground on the Particle Argon, and output from the ultrasonic sensor is connected to D2 on the Particle Argon.
Circuit Diagram (Buzzer)
VCC from the buzzer is connected to the 3.3V port on the Particle Argon, ground from the buzzer is connected to the ground on the Particle Argon, and output from the buzzer is connected to D6 on the Particle Argon.
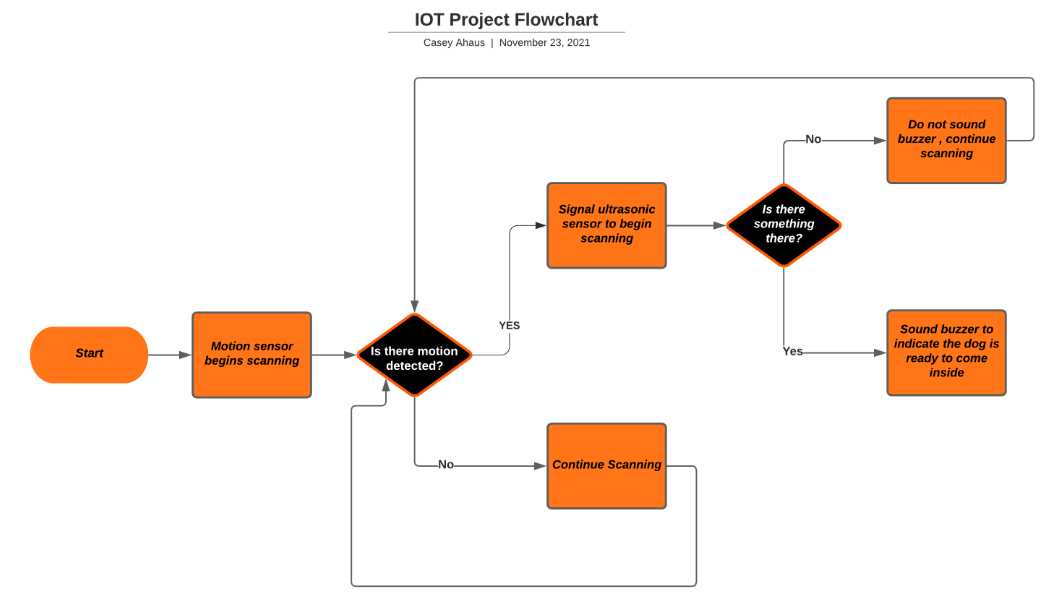
Flow Diagram
This flow diagram shows the thought process behind the code and how to Particle Argons communicate with each other.
Live Data (Ultrasonic)
This is live data collected from Google Sheets of the ultrasonic sensor
Live Data Graphing (Ultrasonic)
This is live data graphed from Google Sheets of the ultrasonic sensor
Live Data (Motion)
This is live data collected from Google Sheets of the motion sensor
Live Data Graphing (Motion)
This is live data graphed from Google Sheets of the motion sensor
The motion sensor begins the entire process by telling the other devices that it has sensed something.
intsensorPin=2;//Sensor pinintmotionsensorInput=0;//This reads the motion statusinttemp=0;voidsetup(){pinMode(D2,INPUT);//sets the motion sensor pin as an inputdelay(60000);//Calibration Delay for Motion SensorParticle.subscribe("UltraDetected",Ultrasonic,"e00fce68a308ce520fe51aac");}voidloop(){motionsensorInput=digitalRead(D2);//reads the input valueif(motionsensorInput==HIGH){//checks to see if there is an input. If there is: the argon sends a motion alert to the cloud for the ultrasonic argon to activate and check if something is there. Particle.publish("MotionAlert","Movement");delay(1000);}else{delay(1000);}}voidUltrasonic(constchar*event,constchar*data){Particle.publish("BothChecked","Let the dog in!");}}
Ultrasonic Sensor Code
C/C++
The ultrasonic sensor is used to double-check if the dog is actually at the door.
//Defining variablesunsignedlongduration,inch,setdistance,setdistanceinch,diff;inttrigPin=2;intredPin=3;intyellowPin=4;intgreenPin=5;intechoPin=6;voidsetup(){//Defining inputs and outputspinMode(redPin,OUTPUT);pinMode(yellowPin,OUTPUT);pinMode(greenPin,OUTPUT);pinMode(trigPin,OUTPUT);pinMode(echoPin,INPUT);pinMode(D7,OUTPUT);Particle.subscribe("MotionAlert",UltrasonicCheck,"e00fce68a308ce520fe51aac");//This particle only activates after recieving a confirmation saying that the other argon has detected motion.setdistanceinch=0;Serial.begin(9600);}voidUltrasonicCheck(constchar*event,constchar*data){delay(10);//lines 23 - 30 output and collect the soundwave, get a duration in//terms of microseconds, convert that time to distance since we know how fast sound travelsdigitalWrite(trigPin,LOW);delayMicroseconds(2);digitalWrite(trigPin,HIGH);delayMicroseconds(10);digitalWrite(trigPin,LOW);duration=pulseIn(echoPin,HIGH);inch=(duration/2)/74;//divides time in half since wave has to go both there and back,//divides by 74 since that is the time it takes for sound to travel one inch.if(inch<=18){//Checks if there is anything within 18 inches of the sensor.//if there is, the loop will upload a "1" to the cloudsetdistanceinch=0;//redefine our set distance to zero so we can move into red zone if the //setdistance was previously set to 20-24 inchesParticle.publish("UltraDetected","1");digitalWrite(redPin,HIGH);delay(5000);//delay 5 seconds digitalWrite(redPin,LOW);setdistanceinch=inch;//defines distance so we must change from this (EITHER direction) //4 inches before lighting code will run again.}else{delay(500);//delay half second when outside of 18 inch range}}
Buzzer Code
C/C++
The buzzer is the last step in the process which will buzz when both the motion detector and the ultrasonic detector have sensed that the dog is at the door.
intbuzzerPin=6;//Buzzer pinvoidsetup(){pinMode(D6,OUTPUT);//sets the passive buzzer to be an outputParticle.subscribe("UltraDetected",Ultrasonic,"e00fce68a308ce520fe51aac");}//The buzzer is the last step in the process. // If the motion sensor detects motion it sends a signal to the ultrasonic sensor asking to double check if something is there// If the ultrasonic sensor says something is there it will send a signal back to the motion sensor which will activate thsi loop from the subscribe above. // The buzzer will only sound if both the motion sensor and ultrasonic sensor have detected motion.//code for passive buzzer beepsvoidUltrasonic(constchar*event,constchar*data){beep();Particle.publish("BothChecked","Send to buzzer");}voidbeep(){tone(D6,3000,50);}














_1o06fNSUDU.png)

_Crahihebgs.png)
_tKSM2X0Sl6.png)










{kind=link}
{kind=link}
{kind=link}
{kind=link}
_1o06fNSUDU.png){kind=link}
{kind=link}
_Crahihebgs.png){kind=link}
_tKSM2X0Sl6.png){kind=link}
Comments
Please log in or sign up to comment.